一、c++语言部分
1. extern c
将让 C++ 中的函数名具备 C-linkage 性质,目的是让 C 代码在调用这个函数时,能正确的链接到具体的地址。
C调用C++,使用extern "C"则是告诉编译器依照C的方式来编译封装接口,当然接口函数里面的C++语法还是按C++方式编译。
而C++调用C,extern "C" 的作用是:让C++连接器找调用函数的符号时采用C的方式
函数的具体定义无关紧要,仍旧使用 C++ 编译
------------- 额外的废话
C++ 中函数有重载,使用函数名 + 参数信息作为链接时的唯一 ID。
C 中函数没有重载,只使用函数名作为链接时的唯一 ID。
C编译器编译代码生成的obj文件的符号表内,函数名称保持原样,比如int add(int,int)函数在符号表内就叫做add;C++编译器编译C++代码生成的obj文件符号表内,因为有overload的存在,函数名称的符号不再是原来的比如add,而是类似_Z3addii这样的(这是我的g++结果)。
那么,一个C程序需要使用某个C++库内的add函数时,C程序这边期望的是add,但C++库内是_Z3addii这样的,不匹配嘛对不对,所以链接阶段要报错,说找不到add这个函数。
同样,一个C++程序需要使用某个C库内的add函数,C++程序这边期望的是_Z3addii,但C库内是add这样的,同样不匹配,链接阶段也是报错,这次是说找不到_Z3addii。
extern "C"的意思,是让C++编译器(不是C编译器,而且是编译阶段,不是链接阶段)在编译C++代码时,为被extern “C”所修饰的函数在符号表中按C语言方式产生符号名(比如前面的add),而不是按C++那样的增加了参数类型和数目信息的名称(_Z3addii)。
展开来细说,就是:
如果是C调用C++函数,在C++一侧对函数声明加了extern "C"后符号表内就是add这样的名称,C程序就能正常找到add来调用;如果是C++调用C函数,在C++一侧在声明这个外部函数时,加上extern "C"后,C++产生的obj文件符号表内就也是标记为它需要一个名为add的外部函数,这样配合C库,就一切都好。
总结:
不管是C代码调用C++编译器生成的库函数,还是C++代码调用C编译器生成的库函数,都需要在C++代码一侧对相应的函数进行extern “C”申明。
extern "C"
{
int func(int);
int var;
}
它的意思就是告诉编译器将extern “C”后面的括号里的代码当做C代码来处理,当然我们也可以以单条语句来声明
extern "C" int func(int);
extern "C" int var;
这样就声明了C类型的func和var。很多时候我们写一个头文件声明了一些C语言的函数,而这些函数可能被C和C++代码调用,当我们提供给C++代码调用时,需要在头文件里加extern “C”,否则C++编译的时候会找不到符号,而给C代码调用时又不能加extern “C”,因为C是不支持这样的语法的,常见的处理方式是这样的,我们以C的库函数memset为例
#ifdef __cplusplus
extern "C" {
#endif
void *memset(void*, int, size_t);
#ifdef __cplusplus
}
#endif
其中__cplusplus是C++编译器定义的一个宏,如果这份代码和C++一起编译,那么memset会在extern "C"里被声明,如果是和C代码一起编译则直接声明,由于__cplusplus没有被定义,所以也不会有语法错误。这样的技巧在系统头文件里经常被用到。
2. volatile/memory barriar
链接:https://www.zhihu.com/question/31459750/answer/52069135
来源:知乎
C/C++多线程编程中不要使用volatile。
(注:这里的意思指的是指望volatile解决多线程竞争问题是有很大风险的,除非所用的环境系统不可靠才会为了保险加上volatile,或者是从极限效率考虑来实现很底层的接口。这要求编写者对程序逻辑走向很清楚才行,不然就会出错)
C++11标准中明确指出解决多线程的数据竞争问题应该使用原子操作或者互斥锁。
C和C++中的volatile并不是用来解决多线程竞争问题的,而是用来修饰一些因为程序不可控因素导致变化的变量,比如访问底层硬件设备的变量,以提醒编译器不要对该变量的访问擅自进行优化。
多线程场景下可以参考《Programming with POSIX threads》的作者Dave Butenhof对
Why don't I need to declare shared variables VOLATILE?
这个问题的解释:
comp.programming.threads FAQ
如果光对共享变量使用volatile修饰而在可能存在竞争的操作中不加锁或使用原子操作对解决多线程竞争没有任何卵用,因为volatile并不能保证操作的原子性,在读取、写入变量的过程中仍然可能被其他线程打断导致意外结果发生。
链接:https://www.zhihu.com/question/20228202/answer/24959876
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
首先需要明确的是,程序在运行起来,内存访问的顺序和程序员编写的顺序不一定一致,基于这个前提下,Memory barrier 就有存在的必要了。看一个例子:
x = r;
y = 1; 这里,y = 1 在实际运行中可能先于 x = r 进行。实际上,在单线程环境中,这两句谁先执行谁后执行都没有任何关系,它们之间不存在依赖关系,但是如果在多线程中 x 和 y 的赋值存在隐式依赖时:
// thread 1
while (!x); // memory barrier assert(y == r); // thread 2 y = r; // memory barrier x = 1; 此代码断言就可能失败。
Memory barrier 能够保证其之前的内存访问操作先于其后的完成。如果说到 Memory barrier 常用的地方,那么包括:
- 实现锁机制
- 用于驱动程序
- 编写无锁的代码
这里篇幅有限,如果你作为程序员,你可以从 https://www.kernel.org/doc/Documentation/memory-barriers.txt 一文入手研究,如果这个还不能满足你,可以进一步深入硬件来研究多 CPU 间内存乱序访问的问题:http://www.rdrop.com/users/paulmck/scalability/paper/whymb.2010.06.07c.pdf
我个人也对 Memory barrier 做了一点小研究,主要写了几个例子验证乱序的存在: http://b2e699b3.wiz03.com/share/s/2OVFCP1_wkXs20LtbT1nXNrj0EqwFC1zZAjT2bCeRi3Tzco2
3. dynamic cast
reinterpret_cast运算符是用来处理无关类型之间的转换;它会产生一个新的值,这个值会有与原始参数(expressoin)有完全相同的比特位。
reinterpret_cast用在任意指针(或引用)类型之间的转换;以及指针与足够大的整数类型之间的转换;从整数类型(包括枚举类型)到指针类型,无视大小。
MSDN的Visual C++ Developer Center 给出了它的使用价值:用来辅助哈希函数。下边是MSNDN上的例子:
// expre_reinterpret_cast_Operator.cpp
// compile with: /EHsc
#include <iostream>
// Returns a hash code based on an address unsigned short Hash( void *p ) { unsigned int val = reinterpret_cast<unsigned int>( p ); return ( unsigned short )( val ^ (val >> 16)); } using namespace std; int main() { int a[20]; for ( int i = 0; i < 20; i++ ) cout << Hash( a + i ) << endl; }
C++中的类型转换分为两种:
1.隐式类型转换;
2.显式类型转换。
而对于隐式变换,就是标准的转换,在很多时候,不经意间就发生了,比如int类型和float类型相加时,int类型就会被隐式的转换位float类型,然后再进行相加运算。而关于隐式转换不是今天总结的重点,重点是显式转换。在标准C++中有四个类型转换符:static_cast、dynamic_cast、const_cast和reinterpret_cast;下面将对它们一一的进行总结。
static_cast
static_cast的转换格式:static_cast
将expression转换为type-id类型,主要用于非多态类型之间的转换,不提供运行时的检查来确保转换的安全性。主要在以下几种场合中使用:
1.用于类层次结构中,基类和子类之间指针和引用的转换;
当进行上行转换,也就是把子类的指针或引用转换成父类表示,这种转换是安全的;
当进行下行转换,也就是把父类的指针或引用转换成子类表示,这种转换是不安全的,也需要程序员来保证;
2.用于基本数据类型之间的转换,如把int转换成char,把int转换成enum等等,这种转换的安全性需要程序员来保证;
3.把void指针转换成目标类型的指针,是及其不安全的;
注:static_cast不能转换掉expression的const、volatile和__unaligned属性。
dynamic_cast
dynamic_cast的转换格式:dynamic_cast
将expression转换为type-id类型,type-id必须是类的指针、类的引用或者是void *;如果type-id是指针类型,那么expression也必须是一个指针;如果type-id是一个引用,那么expression也必须是一个引用。
在C++的面对对象思想中,虚函数起到了很关键的作用,当一个类中拥有至少一个虚函数,那么编译器就会构建出一个虚函数表(virtual method table)来指示这些函数的地址,假如继承该类的子类定义并实现了一个同名并具有同样函数签名(function siguature)的方法重写了基类中的方法,那么虚函数表会将该函数指向新的地址。此时多态性就体现出来了:当我们将基类的指针或引用指向子类的对象的时候,调用方法时,就会顺着虚函数表找到对应子类的方法而非基类的方法。
当然虚函数表的存在对于效率上会有一定的影响,首先构建虚函数表需要时间,根据虚函数表寻到到函数也需要时间。
因为这个原因如果没有继承的需要,一般不必在类中定义虚函数。但是对于继承来说,虚函数就变得很重要了,这不仅仅是实现多态性的一个重要标志,同时也是dynamic_cast转换能够进行的前提条件。
假如去掉上个例子中Stranger类析构函数前的virtual,那么语句Children* child_r = dynamic_cast
在编译期就会直接报出错误,具体原因不是很清楚,我猜测可能是因为当类没有虚函数表的时候,dynamic_cast就不能用RTTI来确定类的具体类型,于是就直接不通过编译。
对于从子类到基类的指针转换,static_cast和dynamic_cast都是成功并且正确的(所谓成功是说转换没有编译错误或者运行异常;所谓正确是指方法的调用和数据的访问输出是期望的结果),这是面向对象多态性的完美体现。
而从基类到子类的转换,static_cast和dynamic_cast都是成功的,但是正确性方面,我对两者的结果都先进行了是否非空的判别:dynamic_cast的结果显示是空指针,而static_cast则是非空指针。但很显然,static_cast的结果应该算是错误的,子类指针实际所指的是基类的对象,而基类对象并不具有子类的Study()方法(除非妈妈又想去接受个"继续教育")。
对于没有关系的两个类之间的转换,输出结果表明,dynamic_cast依然是返回一个空指针以表示转换是不成立的;static_cast直接在编译期就拒绝了这种转换。
4、malloc/ new
new的功能是在堆区新建一个对象,并返回该对象的指针。
所谓的【新建对象】的意思就是,将调用该类的构造函数,因为如果不构造的话,就不能称之为一个对象。
而malloc只是机械的分配一块内存,如果用mallco在堆区创建一个对象的话,是不会调用构造函数的
链接:https://www.zhihu.com/question/20220583/answer/28490955
5、内存对齐
我从下面三条说明了编译器对字节处理的一些原则。当然除了一些特殊的编译器在处理字节对齐的方式也不一样, 这些情况我未碰到过,就不作说明了。
| 类型 | 对齐值(字节) |
| char | 1 |
| short | 2 |
| int | 4 |
| float | 4 |
| double | 4 |
d. 类、结构及成员的有效对齐字节值。有效对齐值=min(类/结构体/成员的自身对齐字节值,指定对齐字节值)。 有效对齐值决定了数据的存放方 式,sizeof 运算符就是根据有效对齐值来计算成员大小的。简单来说, 有效对齐其实就是要求数据成员存放的地址值能被有效对齐值整除,即:地址值%有效对齐值=0
6、stl
1.vector数据结构
vector和数组类似,拥有一段连续的内存空间,并且起始地址不变。
因此能高效的进行随机存取,时间复杂度为o(1);
但因为内存空间是连续的,所以在进行插入和删除操作时,会造成内存块的拷贝,时间复杂度为o(n)。
另外,当数组中内存空间不够时,会重新申请一块内存空间并进行内存拷贝。
2.list数据结构
list是由双向链表实现的,因此内存空间是不连续的。
只能通过指针访问数据,所以list的随机存取非常没有效率,时间复杂度为o(n);
但由于链表的特点,能高效地进行插入和删除。
1.说说std::vector的底层(存储)机制。
vector就是一个动态数组,里面有一个指针指向一片连续的内存空间,当空间不够装下数据时,会自动申请另一片更大的空间(一般是增加当前容量的100%),然后把原来的数据拷贝过去,接着释放原来的那片空间;当释放或者删除里面的数据时,其存储空间不释放,仅仅是清空了里面的数据。
2.std::vector的自增长机制。
当已经分配的空间不够装下数据时,分配双倍于当前容量的存储区,把当前的值拷贝到新分配的内存中,并释放原来的内存。
3.说说std::list的底层(存储)机制。
以结点为单位存放数据,结点的地址在内存中不一定连续,每次插入或删除一个元素,就配置或释放一个元素空间
4.什么情况下用vector,什么情况下用list。
vector可以随机存储元素(即可以通过公式直接计算出元素地址,而不需要挨个查找),但在非尾部插入删除数据时,效率很低,适合对象简单,对象数量变化不大,随机访问频繁。
list不支持随机存储,适用于对象大,对象数量变化频繁,插入和删除频繁。
说说std::map底层机制。
map以RB-TREE为底层机制。RB-TREE是一种平衡二叉搜索树,自动排序效果不错。
通过map的迭代器不能修改其键值,只能修改其实值。所以map的迭代器既不是const也不是mutable。
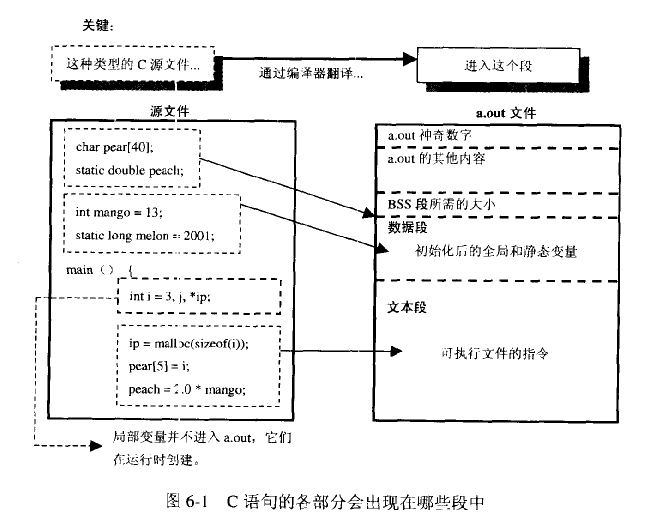
7、c++内存布局, 虚表
C语言的内存模型
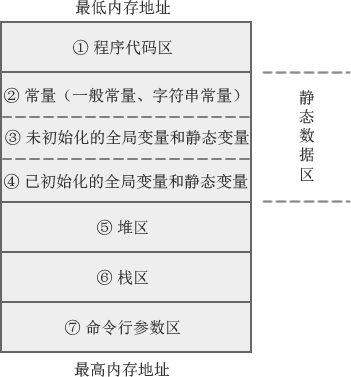
程序代码区(code area)
存放函数体的二进制代码
静态数据区(data area)
也称全局数据区,包含的数据类型比较多,如全局变量、静态变量、一般常量、字符串常量。其中:
- 全局变量和静态变量的存储是放在一块的,初始化的全局变量和静态变量在一块区域, 未初始化的全局变量和未初始化的静态变量在相邻的另一块区域。
- 常量数据(一般常量、字符串常量)存放在另一个区域。
注意:静态数据区的内存在程序结束后由操作系统释放。
堆区(heap area)
一般由程序员分配和释放,若程序员不释放,程序运行结束时由操作系统回收。malloc()、calloc()、free()等函数操作的就是这块内存。
注意:这里所说的堆区与数据结构中的堆不是一个概念,堆区的分配方式倒是类似于链表。
栈区(stack area)
由系统自动分配释放,存放函数的参数值、局部变量的值等。其操作方式类似于数据结构中的栈。
命令行参数区
存放命令行参数和环境变量的值,如通过main()函数传递的值。
C++对象的内存布局
C++语言在C的基础上添加了面向对象的概念,引入了封装,继承,多态。而一个对象的内存布局就相对于C语言的结构体等在内存的布局要复杂的多。
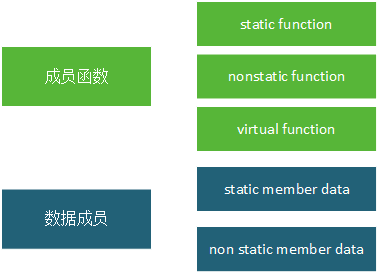
在C++中,有两种数据成员(class data members):static 和nonstatic,以及三种类成员函数(class member functions):static、nonstatic和virtual:
非继承下的C++对象模型
概述:在此模型下,nonstatic 数据成员被置于每一个类对象中,而static数据成员被置于类对象之外。static与nonstatic函数也都放在类对象之外,而对于virtual 函数,则通过虚函数表+虚指针来支持,具体如下:
-
- 每个类生成一个表格,称为虚表(virtual table,简称vtbl)。虚表中存放着一堆指针,这些指针指向该类每一个虚函数。虚表中的函数地址将按声明时的顺序排列,不过当子类有多个重载函数时例外,后面会讨论。
- 每个类对象都拥有一个虚表指针(vptr),由编译器为其生成。虚表指针的设定与重置皆由类的复制控制(也即是构造函数、析构函数、赋值操作符)来完成。vptr的位置为编译器决定,传统上它被放在所有显示声明的成员之后,不过现在许多编译器把vptr放在一个类对象的最前端。关于数据成员布局的内容,在后面会详细分析。
另外,虚函数表的前面设置了一个指向type_info的指针,用以支持RTTI(Run Time Type Identification,运行时类型识别)。RTTI是为多态而生成的信息,包括对象继承关系,对象本身的描述等,只有具有虚函数的对象在会生成。
现在我们有一个类Base,它包含了上面这5中类型的数据或函数:
class Base
{
public: Base(int i) :baseI(i){}; int getI(){ return baseI; } static void countI(){}; virtual void print(void){ cout << "Base::print()"; } virtual ~Base(){} private: int baseI; static int baseS; }; 
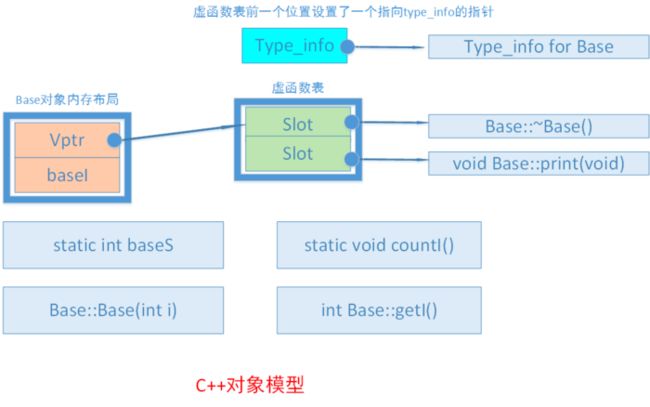
可以看到,对一个C++对象来说,它的内存布局仅有虚表指针和非静态成员,而其他的静态成员,成员函数(静态,非静态),虚表等都是布局在类上的。
##################
Aclass* ptra=new Bclass;
98 int ** ptrvf=(int**)(ptra);
int ** ptrvf=(int**)(ptra);
99 RTTICompleteObjectLocator str=
100 *((RTTICompleteObjectLocator*)(*((int*)ptrvf[0]-1)));
可以明显看到,虚表地址减1之后才得到类型信息。
结论:vptr指向的第一个位置是第一个虚函数的地址,不是type_info。
B. tips
1. 空类
class A
{
};
void main()
{
printf("sizeof(A): %d\n", sizeof(A));
getchar();
}
得到结果为:1。
类的实例化就是给每个实例在内存中分配一块地址。空类被实例化时,会由编译器隐含的添加一个字节。所以空类的size为1。
2.虚函数
class A
{
virtual void FuncA();
virtual void FuncB();
};
得到结果:4
当C++ 类中有虚函数的时候,会有一个指向虚函数表的指针(vptr),在32位系统分配指针大小为4字节。所以size为4.
3.静态数据成员
class A
{
int a;
static int b;
virtual void FuncA();
};
得到结果:8
静态数据成员被编译器放在程序的一个global data members中,它是类的一个数据成员.但是它不影响类的大小,不管这个类实际产生了多少实例,还是派生了多少新的类,静态成员数据在类中永远只有一个实体存在。
而类的非静态数据成员只有被实例化的时候,他们才存在.但是类的静态数据成员一旦被声明,无论类是否被实例化,它都已存在.可以这么说,类的静态数据成员是一种特殊的全局变量.
所以该类的size为:int a型4字节加上虚函数表指针4字节,等于8字节。
4.普通成员函数
class A
{
void FuncA();
}
结果:1
类的大小与它的构造函数、析构函数和其他成员函数无关,只已它的数据成员有关。
5.普通继承
class A
{
int a;
};
class B
{
int b;
};
class C : public A, public B
{
int c;
};
结果为:sizeof(C) =12.
可见普通的继承,就是基类的大小,加上派生类自身成员的大小。
6.虚拟继承
class C : virtual public A, virtual public B
{
int c;
};
结果:16.
当存在虚拟继承时,派生类中会有一个指向虚基类表的指针。所以其大小应为普通继承的大小(12字节),再加上虚基类表的指针大小(4个字节),共16字节。
###########################
作者:启发禅悟
链接:https://www.jianshu.com/p/0c10b662ef09
來源:简书
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
8、shared_ptr
When using unique_ptr, there can be at most one unique_ptr pointing at any one resource. When that unique_ptr is destroyed, the resource is automatically reclaimed. Because there can only be one unique_ptr to any resource, any attempt to make a copy of a unique_ptr will cause a compile-time error. For example, this code is illegal:
unique_ptr<T> myPtr(new T); // Okay unique_ptr<T> myOtherPtr = myPtr; // Error: Can't copy unique_ptrHowever, unique_ptr can be moved using the new move semantics:
unique_ptr<T> myPtr(new T); // Okay unique_ptr<T> myOtherPtr = std::move(myPtr); // Okay, resource now stored in myOtherPtrSimilarly, you can do something like this:
unique_ptr<T> MyFunction() { unique_ptr<T> myPtr(/* ... */); /* ... */ return myPtr; }This idiom means "I'm returning a managed resource to you. If you don't explicitly capture the return value, then the resource will be cleaned up. If you do, then you now have exclusive ownership of that resource." In this way, you can think of unique_ptr as a safer, better replacement for auto_ptr.
shared_ptr, on the other hand, allows for multiple pointers to point at a given resource. When the very last shared_ptr to a resource is destroyed, the resource will be deallocated. For example, this code is perfectly legal:
shared_ptr<T> myPtr(new T); // Okay shared_ptr<T> myOtherPtr = myPtr; // Sure! Now have two pointers to the resource.Internally, shared_ptr uses reference counting to track how many pointers refer to a resource, so you need to be careful not to introduce any reference cycles.
In short:
- Use
unique_ptrwhen you want a single pointer to an object that will be reclaimed when that single pointer is destroyed. - Use
shared_ptrwhen you want multiple pointers to the same resource.
unique_ptr
unique_ptr 这个类的关键点在于这个定义:
unique_ptr(const unique_ptr&) = delete;
它把拷贝构造函数干掉了,这样的话,就不能直接这样用了:
unique_ptr pa(new A());
unique_ptr pb = pa;
这样也挺好,既然auto_ptr是因为多个变量持有同一个指针引起的,那么我尽量避免这种拷贝就好了。
唉,但这是C++啊,不留点口子肯定不是C++的风格,所以unique_ptr还留下了move赋值这种东西,这个我们不去看了。只知道有这么一回事就行了。我们今天的重点是shared_ptr
shared_ptr
shared_ptr也是对auto_ptr的一种改进,它的思路是,使用引用计数来管理指针。如果一个指针被多次使用了,那么引用计数就加一,如果减少一次使用,引用计数就减一。当引用计数变为0,那就可以真正地删除指针了。先看一下基本用法:
#include
#include
using namespace std;
class A {
private:
int a;
public:
A() {
cout << "create object of A" << endl;
a = 1;
}
~A() {
cout << "destroy an object A" << endl;
}
void print() {
cout << "a is " << a << endl;
}
};
int main() {
shared_ptr pa(new A());
shared_ptr pb = pa;
return 0;
}
大家可以与上节课的auto_ptr比较一下,就发现它们的区别了,当然了,这样写还是不行:
int main() {
A * a = new A(); shared_ptr<A> pa(a); shared_ptr<A> pb(a); return 0; } 这种写法还是会让指针被 delete 两次。
它的基本原理是在智能指针中引入一个引用计数,在拷贝构造中对引用计数加一,在析构函数中,对引用计数减一。我写一个简单的例子模拟shared_ptr如下:
template
class SmartPtr {
private:
int * refcnt;
V * v;
public:
SmartPtr(V* ptr): v(ptr) {
refcnt = new int(1);
}
SmartPtr(const SmartPtr& ptr) {
this->v = ptr.v;
this->refcnt = ptr.refcnt;
*refcnt += 1;
}
~SmartPtr() {
cout << "to delete a smart pointer" << endl;
*refcnt -= 1;
if (*refcnt == 0) {
delete v;
delete refcnt;
}
}
};
int main() {
A * ptrA = new A();
SmartPtr sp1(ptrA);
SmartPtr sp2 = sp1;
return 0;
}
这个例子中中需要注意的点是引用计数是所有管理同一个指针的智能指针所共享的,所以在这个例子中,sp1和sp2的引用计数指向的是相同的一个整数。
我们看一下这个例子的输出:
# g++ -o smart myShare.cpp
# ./smart
create object of A
to delete a smart pointer
to delete a smart pointer
destroy an object A
可以看到,这个和shared_ptr一样可以正确地delete指针。
网络部分
1、tcp/udp区别
2、tcp 三次握手/ connect/ accept 关系, read返回0
3、select/ epoll
ET/LT
在一个非阻塞的socket上调用read/write函数, 返回EAGAIN或者EWOULDBLOCK(注: EAGAIN就是EWOULDBLOCK)
从字面上看, 意思是:EAGAIN: 再试一次,EWOULDBLOCK: 如果这是一个阻塞socket, 操作将被block,perror输出: Resource temporarily unavailable
总结:
这个错误表示资源暂时不够,能read时,读缓冲区没有数据,或者write时,写缓冲区满了。遇到这种情况,如果是阻塞socket,read/write就要阻塞掉。而如果是非阻塞socket,read/write立即返回-1, 同时errno设置为EAGAIN。
所以,对于阻塞socket,read/write返回-1代表网络出错了。但对于非阻塞socket,read/write返回-1不一定网络真的出错了。可能是Resource temporarily unavailable。这时你应该再试,直到Resource available。
综上,对于non-blocking的socket,正确的读写操作为:
读:忽略掉errno = EAGAIN的错误,下次继续读
写:忽略掉errno = EAGAIN的错误,下次继续写
对于select和epoll的LT模式,这种读写方式是没有问题的。但对于epoll的ET模式,这种方式还有漏洞。
epoll的两种模式LT和ET
二者的差异在于level-trigger模式下只要某个socket处于readable/writable状态,无论什么时候进行epoll_wait都会返回该socket;而edge-trigger模式下只有某个socket从unreadable变为readable或从unwritable变为writable时,epoll_wait才会返回该socket。
所以,在epoll的ET模式下,正确的读写方式为:
读:只要可读,就一直读,直到返回0,或者 errno = EAGAIN
写:只要可写,就一直写,直到数据发送完,或者 errno = EAGAIN
正确的读
| n = 0; |
| while ((nread = read(fd, buf + n, BUFSIZ-1)) > 0) { |
| n += nread; |
| } |
| if (nread == -1 && errno != EAGAIN) { |
| perror("read error"); |
| } |
正确的写
| int nwrite, data_size = strlen(buf); |
| n = data_size; |
| while (n > 0) { |
| nwrite = write(fd, buf + data_size - n, n); |
| if (nwrite < n) { |
| if (nwrite == -1 && errno != EAGAIN) { |
| perror("write error"); |
| } |
| break; |
| } |
| n -= nwrite; |
| } |
正确的accept,accept 要考虑 2 个问题
(1) 阻塞模式 accept 存在的问题
考虑这种情况:TCP连接被客户端夭折,即在服务器调用accept之前,客户端主动发送RST终止连接,导致刚刚建立的连接从就绪队列中移出,如果套接口被设置成阻塞模式,服务器就会一直阻塞在accept调用上,直到其他某个客户建立一个新的连接为止。但是在此期间,服务器单纯地阻塞在accept调用上,就绪队列中的其他描述符都得不到处理。
解决办法是把监听套接口设置为非阻塞,当客户在服务器调用accept之前中止某个连接时,accept调用可以立即返回-1,这时源自Berkeley的实现会在内核中处理该事件,并不会将该事件通知给epool,而其他实现把errno设置为ECONNABORTED或者EPROTO错误,我们应该忽略这两个错误。
(2)ET模式下accept存在的问题
考虑这种情况:多个连接同时到达,服务器的TCP就绪队列瞬间积累多个就绪连接,由于是边缘触发模式,epoll只会通知一次,accept只处理一个连接,导致TCP就绪队列中剩下的连接都得不到处理。
解决办法是用while循环抱住accept调用,处理完TCP就绪队列中的所有连接后再退出循环。如何知道是否处理完就绪队列中的所有连接呢?accept返回-1并且errno设置为EAGAIN就表示所有连接都处理完。
综合以上两种情况,服务器应该使用非阻塞地accept,accept在ET模式下的正确使用方式为:
| while ((conn_sock = accept(listenfd,(struct sockaddr *) &remote, (size_t *)&addrlen)) > 0) { |
| handle_client(conn_sock); |
| } |
| if (conn_sock == -1) { |
| if (errno != EAGAIN && errno != ECONNABORTED && errno != EPROTO && errno != EINTR) |
| perror("accept"); |
| } |
一道腾讯后台开发的面试题
使用Linuxepoll模型,水平触发模式;当socket可写时,会不停的触发socket可写的事件,如何处理?
第一种最普遍的方式:
需要向socket写数据的时候才把socket加入epoll,等待可写事件。
接受到可写事件后,调用write或者send发送数据。
当所有数据都写完后,把socket移出epoll。
这种方式的缺点是,即使发送很少的数据,也要把socket加入epoll,写完后在移出epoll,有一定操作代价。
一种改进的方式:
开始不把socket加入epoll,需要向socket写数据的时候,直接调用write或者send发送数据。如果返回EAGAIN,把socket加入epoll,在epoll的驱动下写数据,全部数据发送完毕后,再移出epoll。
这种方式的优点是:数据不多的时候可以避免epoll的事件处理,提高效率。
4、timeout wait过多, 2MSL
- netstat -n | awk '/^tcp/ {++S[$NF]} END {for(a in S) print a, S[a]}'
它会显示例如下面的信息:
TIME_WAIT 814
CLOSE_WAIT 1
FIN_WAIT1 1
ESTABLISHED 634
SYN_RECV 2
LAST_ACK 1
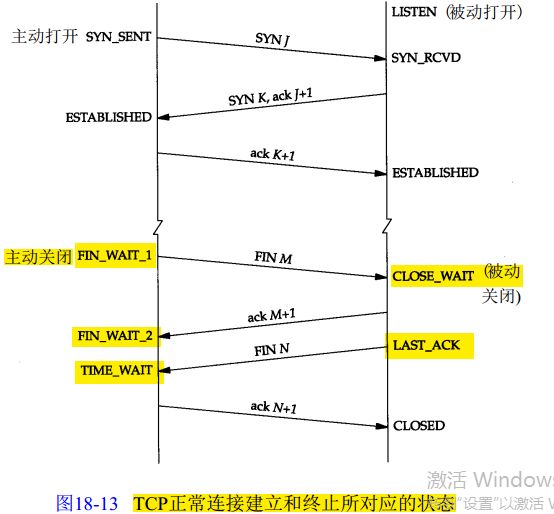
常用的三个状态是:ESTABLISHED 表示正在通信,TIME_WAIT 表示主动关闭,CLOSE_WAIT 表示被动关闭。
如果服务器出了异常,百分之八九十都是下面两种情况:
1.服务器保持了大量TIME_WAIT状态
2.服务器保持了大量CLOSE_WAIT状态
因为linux分配给一个用户的文件句柄是有限的(可以参考:http://blog.csdn.net/shootyou/article/details/6579139),而TIME_WAIT和CLOSE_WAIT两种状态如果一直被保持,那么意味着对应数目的通道就一直被占着,而且是“占着茅坑不使劲”,一旦达到句柄数上限,新的请求就无法被处理了,接着就是大量Too Many Open Files异常,
1.服务器保持了大量TIME_WAIT状态
这种情况比较常见,一些爬虫服务器或者WEB服务器(如果网管在安装的时候没有做内核参数优化的话)上经常会遇到这个问题,这个问题是怎么产生的呢?
从 上面的示意图可以看得出来,TIME_WAIT是主动关闭连接的一方保持的状态,对于爬虫服务器来说他本身就是“客户端”,在完成一个爬取任务之后,他就 会发起主动关闭连接,从而进入TIME_WAIT的状态,然后在保持这个状态2MSL(max segment lifetime)时间之后,彻底关闭回收资源。为什么要这么做?明明就已经主动关闭连接了为啥还要保持资源一段时间呢?这个是TCP/IP的设计者规定 的,主要出于以下两个方面的考虑:
1.防止上一次连接中的包,迷路后重新出现,影响新连接(经过2MSL,上一次连接中所有的重复包都会消失)
2. 可靠的关闭TCP连接。在主动关闭方发送的最后一个 ack(fin) ,有可能丢失,这时被动方会重新发fin, 如果这时主动方处于 CLOSED 状态 ,就会响应 rst 而不是 ack。所以主动方要处于 TIME_WAIT 状态,而不能是 CLOSED 。另外这么设计TIME_WAIT 会定时的回收资源,并不会占用很大资源的,除非短时间内接受大量请求或者受到攻击。
关于MSL引用下面一段话:
- MSL 為 一個 TCP Segment (某一塊 TCP 網路封包) 從來源送到目的之間可續存的時間 (也就是一個網路封包在網路上傳輸時能存活的時間),由 於 RFC 793 TCP 傳輸協定是在 1981 年定義的,當時的網路速度不像現在的網際網路那樣發達,你可以想像你從瀏覽器輸入網址等到第一 個 byte 出現要等 4 分鐘嗎?在現在的網路環境下幾乎不可能有這種事情發生,因此我們大可將 TIME_WAIT 狀態的續存時間大幅調低,好 讓 連線埠 (Ports) 能更快空出來給其他連線使用。
再引用网络资源的一段话:
- 值 得一说的是,对于基于TCP的HTTP协议,关闭TCP连接的是Server端,这样,Server端会进入TIME_WAIT状态,可 想而知,对于访 问量大的Web Server,会存在大量的TIME_WAIT状态,假如server一秒钟接收1000个请求,那么就会积压 240*1000=240,000个 TIME_WAIT的记录,维护这些状态给Server带来负担。当然现代操作系统都会用快速的查找算法来管理这些 TIME_WAIT,所以对于新的 TCP连接请求,判断是否hit中一个TIME_WAIT不会太费时间,但是有这么多状态要维护总是不好。
- HTTP协议1.1版规定default行为是Keep-Alive,也就是会重用TCP连接传输多个 request/response,一个主要原因就是发现了这个问题。
也就是说HTTP的交互跟上面画的那个图是不一样的,关闭连接的不是客户端,而是服务器,所以web服务器也是会出现大量的TIME_WAIT的情况的。
- #对于一个新建连接,内核要发送多少个 SYN 连接请求才决定放弃,不应该大于255,默认值是5,对应于180秒左右时间
- net.ipv4.tcp_syn_retries=2
- #net.ipv4.tcp_synack_retries=2
- #表示当keepalive起用的时候,TCP发送keepalive消息的频度。缺省是2小时,改为300秒
- net.ipv4.tcp_keepalive_time=1200
- net.ipv4.tcp_orphan_retries=3
- #表示如果套接字由本端要求关闭,这个参数决定了它保持在FIN-WAIT-2状态的时间
- net.ipv4.tcp_fin_timeout=30
- #表示SYN队列的长度,默认为1024,加大队列长度为8192,可以容纳更多等待连接的网络连接数。
- net.ipv4.tcp_max_syn_backlog = 4096
- #表示开启SYN Cookies。当出现SYN等待队列溢出时,启用cookies来处理,可防范少量SYN攻击,默认为0,表示关闭
- net.ipv4.tcp_syncookies = 1
- #表示开启重用。允许将TIME-WAIT sockets重新用于新的TCP连接,默认为0,表示关闭
- net.ipv4.tcp_tw_reuse = 1
- #表示开启TCP连接中TIME-WAIT sockets的快速回收,默认为0,表示关闭
- net.ipv4.tcp_tw_recycle = 1
- ##减少超时前的探测次数
- net.ipv4.tcp_keepalive_probes=5
- ##优化网络设备接收队列
- net.core.netdev_max_backlog=3000
net.ipv4.tcp_fin_timeout
net.ipv4.tcp_keepalive_*
5、RST出现原因
TCP异常终止的常见情形
我们在实际的工作环境中,导致某一方发送reset报文的情形主要有以下几种:
1,客户端尝试与服务器未对外提供服务的端口建立TCP连接,服务器将会直接向客户端发送reset报文。

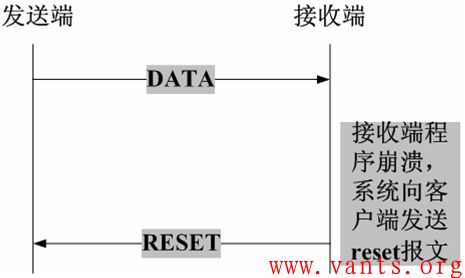
2,客户端和服务器的某一方在交互的过程中发生异常(如程序崩溃等),该方系统将向对端发送TCP reset报文,告之对方释放相关的TCP连接,如下图所示:
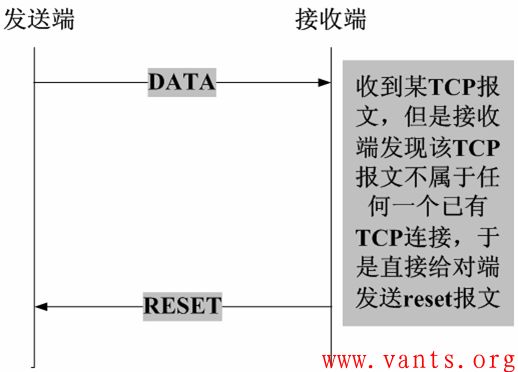
3,接收端收到TCP报文,但是发现该TCP的报文,并不在其已建立的TCP连接列表内(比如server机器直接宕机),则其直接向对端发送reset报文,如下图所示:
TCP_NODelay
链接:https://www.zhihu.com/question/42308970/answer/123620051
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
TCP_NODELAYTCP/IP协议中针对TCP默认开启了 Nagle算法。Nagle算法通过减少需要传输的数据包,来优化网络。关于Nagle算法,@ 郭无心 同学的答案已经说了不少了。在内核实现中,数据包的发送和接受会先做缓存,分别对应于写缓存和读缓存。
If set, disable the Nagle algorithm. This means that segments are always sent as soon as possible, even if there is only a small amount of data. When not set, data is buffered until there is a sufficient amount to send out, thereby avoiding the frequent sending of small packets, which results in poor utilization of the network. This option is overridden by TCP_CORK; however, setting this option forces an explicit flush of pending output, even if TCP_CORK is currently set.
那么针对题主的问题,我们来分析一下。
启动TCP_NODELAY,就意味着禁用了Nagle算法,允许小包的发送。对于延时敏感型,同时数据传输量比较小的应用,开启TCP_NODELAY选项无疑是一个正确的选择。比如,对于SSH会话,用户在远程敲击键盘发出指令的速度相对于网络带宽能力来说,绝对不是在一个量级上的,所以数据传输非常少;而又要求用户的输入能够及时获得返回,有较低的延时。如果开启了Nagle算法,就很可能出现频繁的延时,导致用户体验极差。当然,你也可以选择在应用层进行buffer,比如使用java中的buffered stream,尽可能地将大包写入到内核的写缓存进行发送;vectored I/O(writev接口)也是个不错的选择。
对于关闭TCP_NODELAY,则是应用了Nagle算法。数据只有在写缓存中累积到一定量之后,才会被发送出去,这样明显提高了网络利用率(实际传输数据payload与协议头的比例大大提高)。但是这由不可避免地增加了延时;与TCP delayed ack这个特性结合,这个问题会更加显著,延时基本在40ms左右。当然这个问题只有在连续进行两次写操作的时候,才会暴露出来。
我们看一下摘自Wikipedia的Nagle算法的伪码实现:
if there is new data to send if the window size >= MSS and available data is >= MSS send complete MSS segment now else if there is unconfirmed data still in the pipe enqueue data in the buffer until an acknowledge is received else send data immediately end if end if end if
The user-level solution is to avoid write-write-read sequences on sockets. write-read-write-read is fine. write-write-write is fine. But write-write-read is a killer. So, if you can, buffer up your little writes to TCP and send them all at once. Using the standard UNIX I/O package and flushing write before each read usually works.
连续进行多次对小数据包的写操作,然后进行读操作,本身就不是一个好的网络编程模式;在应用层就应该进行优化。
对于既要求低延时,又有大量小数据传输,还同时想提高网络利用率的应用,大概只能用UDP自己在应用层来实现可靠性保证了。好像企鹅家就是这么干的。
算法部分
1、数组中两个数A,B之和等于第三个数C,求最大的C
2、两个有序数组求中位数
算法部分
二分搜索 Binary Search
分治 Divide Conquer
宽度优先搜索 Breadth First Search
深度优先搜索 Depth First Search
回溯法 Backtracking
双指针 Two Pointers
动态规划 Dynamic Programming
扫描线 Scan-line algorithm
快排 Quick Sort
数据结构部分
栈 Stack
队列 Queue
链表 Linked List
数组 Array
哈希表 Hash Table
二叉树 Binary Tree
堆 Heap
并查集 Union Find
字典树 Trie
根据2017年校招的情况,我整理了2017校招的常考算法类型,以及对应的典型题目。
另附参考答案地址:LINTCODE / LEETCODE 参考答案查询
数学
尾部的零斐波纳契数列
x的平方根
x的平方根 2
大整数乘法
骰子求和
最多有多少个点在一条直线上
超级丑数
比特位操作
将整数A转换为B更新二进制位二进制表示
O(1)时间检测2的幂次
二进制中有多少个1
动态规划
编辑距离正则表达式匹配交叉字符串
乘积最大子序列
二叉树中的最大路径和
不同的路径
通配符匹配
堆
滑动窗口的中位数数据流中位数最高频的K个单词
接雨水
堆化
排序矩阵中的从小到大第k个数
二叉树
二叉树中序遍历二叉树的序列化和反序列化子树
最近公共祖先
二叉树的层次遍历
将二叉树拆成链表
在二叉查找树中插入节点
二分法
经典二分查找问题二分查找两数组的交
区间最小数
寻找旋转排序数组中的最小值
搜索排序区间
寻找峰值
分治法
快速幂两个排序数组的中位数合并K个排序链表
哈希表
变形词子串哈希函数短网址
复制带随机指针的链表
最小子串覆盖
矩阵
搜索二维矩阵旋转图像岛屿的个数
螺旋矩阵
宽度优先搜索
克隆图被围绕的区域拓扑排序
单词接龙
链表
实现一个链表的反转链表求和 II删除链表中的元素
LRU缓存策略
合并两个排序链表
两个链表的交叉
翻转链表 II
复制带随机指针的链表
带环链表
枚举法
统计数字名人确认最长连续上升子序列
最大子数组差
最长公共前缀
排序
快排摆动排序最大间距
最接近零的子数组和
最大数
四数之和
数组划分
第K大元素
排颜色
深度优先搜索
N皇后问题图是否是树带重复元素的排列
分割回文串
数组
数组划分逆序对合并区间
搜索旋转排序数组
最大子数组
删除排序数组中的重复数字
第二大的数组
先递增后递减数组中的最大值
两数和 - 输入的数据是有序的
两个排序数组的中位数
在大数组中查找
颜色分类
合并排序数组
无序数组K小元素
中位数
奇偶分割数组
贪心
主元素寻找缺失的数买卖股票最佳时机
加油站
删除数字
落单的数
最大子数组差
线段树
线段树查询线段树的构造线段树的修改
区间求和
统计比给定整数小的数的个数
栈
带最小值操作的栈用栈实现队列有效的括号序列
简化路径
整数
反转整数将整数A转换为B整数排序
字符串处理
罗马数字转整数回文数乱序字符串
有效回文串
翻转字符串
最长无重复字符的子串
字符串压缩
比较字符串编辑距离II
欢迎关注我的微信公众号:九章算法(ninechapter),帮助你了解IT技术前沿,通过面试、拿到offer、找到好工作!
操作系统
1、进程、线程
进程概念
进程是表示资源分配的基本单位,又是调度运行的基本单位。例如,用户运行自己的程序,系统就创建一个进程,并为它分配资源,包括各种表格、内存空间、磁盘空间、I/O设备等。然后,把该进程放人进程的就绪队列。进程调度程序选中它,为它分配CPU以及其它有关资源,该进程才真正运行。所以,进程是系统中的并发执行的单位。
在Mac、Windows NT等采用微内核结构的操作系统中,进程的功能发生了变化:它只是资源分配的单位,而不再是调度运行的单位。在微内核系统中,真正调度运行的基本单位是线程。因此,实现并发功能的单位是线程。
线程概念
线程是进程中执行运算的最小单位,亦即执行处理机调度的基本单位。如果把进程理解为在逻辑上操作系统所完成的任务,那么线程表示完成该任务的许多可能的子任务之一。例如,假设用户启动了一个窗口中的数据库应用程序,操作系统就将对数据库的调用表示为一个进程。假设用户要从数据库中产生一份工资单报表,并传到一个文件中,这是一个子任务;在产生工资单报表的过程中,用户又可以输人数据库查询请求,这又是一个子任务。这样,操作系统则把每一个请求――工资单报表和新输人的数据查询表示为数据库进程中的独立的线程。线程可以在处理器上独立调度执行,这样,在多处理器环境下就允许几个线程各自在单独处理器上进行。操作系统提供线程就是为了方便而有效地实现这种并发性
引入线程的好处
(1)易于调度。
(2)提高并发性。通过线程可方便有效地实现并发性。进程可创建多个线程来执行同一程序的不同部分。
(3)开销少。创建线程比创建进程要快,所需开销很少。。
(4)利于充分发挥多处理器的功能。通过创建多线程进程(即一个进程可具有两个或更多个线程),每个线程在一个处理器上运行,从而实现应用程序的并发性,使每个处理器都得到充分运行。
进程和线程的关系
(1)一个线程只能属于一个进程,而一个进程可以有多个线程,但至少有一个线程。
(2)资源分配给进程,同一进程的所有线程共享该进程的所有资源。
(3)处理机分给线程,即真正在处理机上运行的是线程。
(4)线程在执行过程中,需要协作同步。不同进程的线程间要利用消息通信的办法实现同步。
2、进程间通信的方式?
(1)管道(pipe)及有名管道(named pipe):管道可用于具有亲缘关系的父子进程间的通信,有名管道除了具有管道所具有的功能外,它还允许无亲缘关系进程间的通信。
(2)信号(signal):信号是在软件层次上对中断机制的一种模拟,它是比较复杂的通信方式,用于通知进程有某事件发生,一个进程收到一个信号与处理器收到一个中断请求效果上可以说是一致的。
(3)消息队列(message queue):消息队列是消息的链接表,它克服了上两种通信方式中信号量有限的缺点,具有写权限得进程可以按照一定得规则向消息队列中添加新信息;对消息队列有读权限得进程则可以从消息队列中读取信息。
(4)共享内存(shared memory):可以说这是最有用的进程间通信方式。它使得多个进程可以访问同一块内存空间,不同进程可以及时看到对方进程中对共享内存中数据得更新。这种方式需要依靠某种同步操作,如互斥锁和信号量等。
(5)信号量(semaphore):主要作为进程之间及同一种进程的不同线程之间得同步和互斥手段。
(6)套接字(socket):这是一种更为一般得进程间通信机制,它可用于网络中不同机器之间的进程间通信,应用非常广泛。
3、线程同步
多线程的同步
有了上面的基本函数还不足以完成本题的要求,为什么呢?因为题目要求按照ABCABC...的方式打印,而3个线程却在抢占资源,所以无法控制排列顺序。这时就需要用到多线程编程中的同步技术。
对于多线程编程来说,同步就是同一时间只允许一个线程访问资源,而其他线程不能访问。多线程有3种同步方式:
- 互斥锁
- 条件变量
- 读写锁
1.互斥锁
互斥锁是最基本的同步方式,它用来保护一个“临界区”,保证任何时刻只由一个线程在执行其中的代码。这个“临界区”通常是线程的共享数据。
下面三个函数给一个互斥锁上锁和解锁:
int
pthread_mutex_lock(pthread_mutex_t *mptr);
int
pthread_mutex_trylock(pthread_mutex_t *mptr);
int
pthread_mutex_unlock(pthread_mutex_t *mptr);
|
假设线程2要给已经被线程1锁住的互斥锁(mutex)上锁(即执行pthread_mutex_lock(mutex)),那么它将一直阻塞直到到线程1解锁为止(即释放mutex)。
如果互斥锁变量时静态分配的,通常初始化为常值PTHREAD_MUTEX_INITIALIZER,如果互斥锁是动态分配的,那么在运行时调用pthread_mutex_init函数来初始化。
2.条件变量
互斥锁用于上锁,而条件变量则用于等待,通常它都会跟互斥锁一起使用。
int
pthread_cond_wait(pthread_cond_t *cptr,pthread_mutex_t *mptr);
int
pthread_cond_signal(pthread_cond_t *cptr);
|
通常pthread_cond_signal只唤醒等待在相应条件变量上的一个线程,若有多个线程需要被唤醒呢,这就要使用下面的函数了:
int
pthread_cond_broadcast(pthread_cond_t *cptr);
|
3.读写锁
互斥锁将试图进入连你姐去的其他简称阻塞住,而读写锁是将读和写作了区分,读写锁的分配规则如下:
(1)只要没有线程持有某个给定的读写锁用于写,那么任意数目的线程可以持有该读写锁用于读;
(2)仅当没有线程持有某个给定的读写锁用于读或用于写时,才能分配该读写锁用于写。
int
pthread_rwlock_rdlock(pthread_relock_t *rwptr);
int
pthread_rwlock_wrlock(pthread_relock_t *rwptr);
int
pthread_rwlock_unlock(pthread_relock_t *rwptr);
|
pthread_cond_wait 为什么需要传递 mutex 参数
链接:https://www.zhihu.com/question/24116967/answer/26747608
来源:知乎
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
- wait()操作通常伴随着条件检测,如:
while(pass == 0) pthread_cond_wait(...); - signal*()函数通常伴随着条件改变,如:
pass = 1; pthread_cond_signal(...)
// 条件测试
pthread_mutex_lock(mtx); while(pass == 0) pthread_cond_wait(...); pthread_mutex_unlock(mtx); // 条件发生修改,对应的signal代码 pthread_mutex_lock(mtx); pass = 1; pthread_mutex_unlock(mtx); pthread_cond_signal(...); 然后,我们假设wait()操作不会自动释放、获取锁,那么代码会变成这样:
// 条件测试
pthread_mutex_lock(mtx); while(pass == 0) { pthread_mutex_unlock(mtx); pthread_cond_just_wait(cv); pthread_mutex_lock(mtx); } pthread_mutex_unlock(mtx); // 条件发生修改,对应的signal代码 pthread_mutex_lock(mtx); pass = 1; pthread_mutex_unlock(mtx); pthread_cond_signal(cv); 久而久之,程序员发现unlock, just_wait, lock这三个操作始终得在一起。于是就提供了一个pthread_cond_wait()函数来同时完成这三个函数。
另外一个证据是,signal()函数是不需要传递mutex参数的,所以关于mutex参数是用于同步wait()和signal()函数的说法更加站不住脚。
所以我的结论是:传递的mutex并不是为了防止wait()函数内部的Race Condition!而是因为调用wait()之前你总是获得了某个mutex(例如用于解决此处pass变量的Race Condition的mutex),并且这个mutex在你调用wait()之前必须得释放掉,调用wait()之后必须得重新获取。
所以,pthread_cond_wait()函数不是一个细粒度的函数,却是一个实用的函数。
生产者、消费者模型
Producer:
While(TRUE)
Mutex_Lock(mutex_p)
if (item_size < FULL)
PREDOCE
Mutex_UnLock(mutex_p)
Mutex_Lock(mutex_c)
if (item_size == 0)
Cond_Signal(cond)
item_size++;
Mutex_UnLock(mutex_c)
Consumer:
Mutex_Lock(mutex_c)
while (item_size == 0)
Cond_Wait(mutex_c, cond)
item_size--;
Mutex_UnLock(mutex_c)