三角剖分算法(delaunay)
原文链接: https://www.cnblogs.com/zhiyishou/p/4430017.html
开篇

在做一个Low Poly的课题,而这种低多边形的成像效果在现在设计中越来越被喜欢,其中的低多边形都是由三角形组成的。
而如何自动生成这些看起来很特殊的三角形,就是本章要讨论的内容。
项目地址: https://github.com/zhiyishou/polyer
Demo:https://zhiyishou.github.io/Polyer
选择
其是最先是由很多离散的点组成,基于这个确定的点集,将点集连接成一定大小的三角形,且分配要相对合理,才能呈现出漂亮的三角化。
这时则要求使用三角剖分算法(Delaunay),引于百度百科《Delaunay三角剖分算法》对Delaunay三角形的定义为:
【定义】三角剖分:假设V是二维实数域上的有限点集,边e是由点集中的点作为端点构成的封闭线段, E为e的集合。那么该点集V的一个三角剖分T=(V,E)是一个平面图G,该平面图满足条件:1.除了端点,平面图中的边不包含点集中的任何点。2.没有相交边。3.平面图中所有的面都是三角面,且所有三角面的合集是散点集V的凸包。在实际中运用的最多的三角剖分是Delaunay三角剖分,它是一种特殊的三角剖分。先从Delaunay边说起:【定义】Delaunay边:假设E中的一条边e(两个端点为a,b),e若满足下列条件,则称之为Delaunay边:存在一个圆经过a,b两点,圆内(注意是圆内,圆上最多三点共圆)不含点集V中任何其他的点,这一特性又称空圆特性。【定义】Delaunay三角剖分:如果点集V的一个三角剖分T只包含Delaunay边,那么该三角剖分称为Delaunay三角剖分。【定义】假设T为V的任一三角剖分,则T是V的一个Delaunay三角剖分,当前仅当T中的每个三角形的外接圆的内部不包含V中任何的点。
算法
subroutine triangulate
input : vertex list
output : triangle list
initialize the triangle list
determine the supertriangle
add supertriangle vertices to the end of the vertex list
add the supertriangle to the triangle list
for each sample point in the vertex list
initialize the edge buffer
for each triangle currently in the triangle list
calculate the triangle circumcircle center and radius
if the point lies in the triangle circumcircle then
add the three triangle edges to the edge buffer
remove the triangle from the triangle list
endif
endfor
delete all doubly specified edges from the edge buffer
this leaves the edges of the enclosing polygon only
add to the triangle list all triangles formed between the point
and the edges of the enclosing polygon
endfor
remove any triangles from the triangle list that use the supertriangle vertices
remove the supertriangle vertices from the vertex list
end
其方法虽然可实现三角化,但是效率还是不太高

input: 顶点列表(vertices) //vertices为外部生成的随机或乱序顶点列表 output:已确定的三角形列表(triangles) 初始化顶点列表 创建索引列表(indices = new Array(vertices.length)) //indices数组中的值为0,1,2,3,......,vertices.length-1 基于vertices中的顶点x坐标对indices进行sort //sort后的indices值顺序为顶点坐标x从小到大排序(也可对y坐标,本例中针对x坐标) 确定超级三角形 将超级三角形保存至未确定三角形列表(temp triangles) 将超级三角形push到triangles列表 遍历基于indices顺序的vertices中每一个点 //基于indices后,则顶点则是由x从小到大出现 初始化边缓存数组(edge buffer) 遍历temp triangles中的每一个三角形 计算该三角形的圆心和半径 如果该点在外接圆的右侧 则该三角形为Delaunay三角形,保存到triangles 并在temp里去除掉 跳过 如果该点在外接圆外(即也不是外接圆右侧) 则该三角形为不确定 //后面会在问题中讨论 跳过 如果该点在外接圆内 则该三角形不为Delaunay三角形 将三边保存至edge buffer 在temp中去除掉该三角形 对edge buffer进行去重 将edge buffer中的边与当前的点进行组合成若干三角形并保存至temp triangles中 将triangles与temp triangles进行合并 除去与超级三角形有关的三角形 end
大多数同学看过伪代码后还是一头雾水,所以用图来解释这个过程,我们先用三点来做实例:
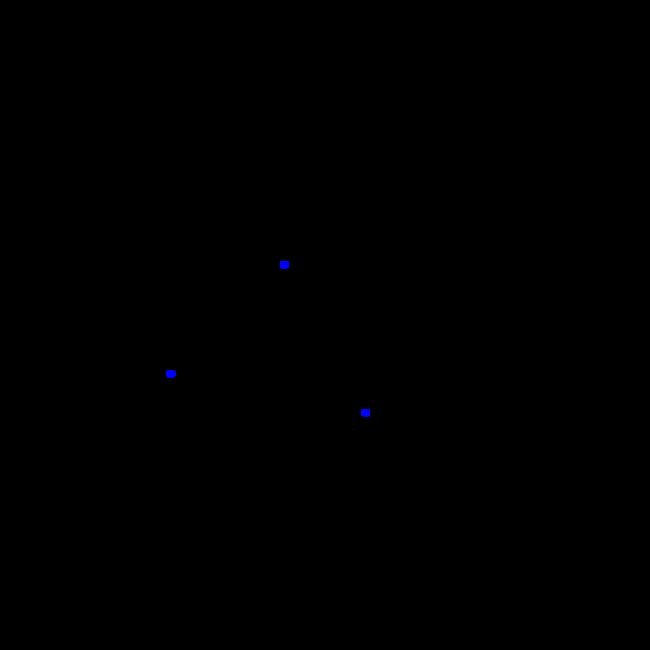
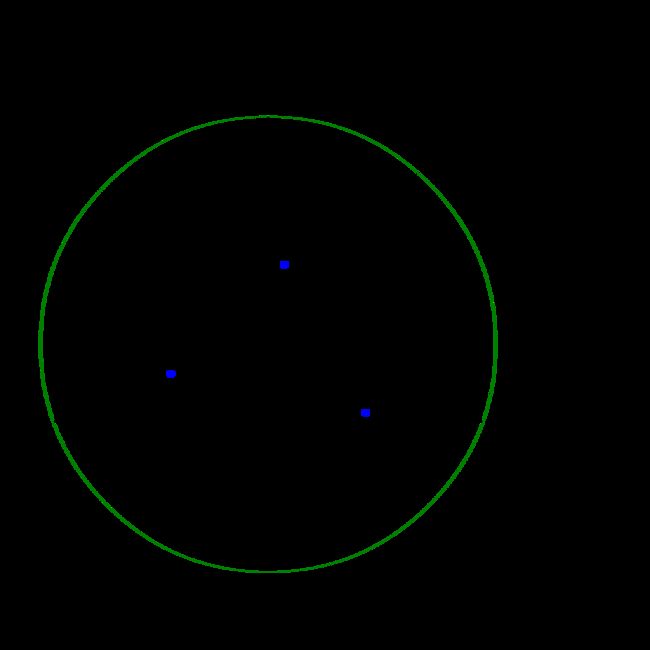
如图,随机的三个点

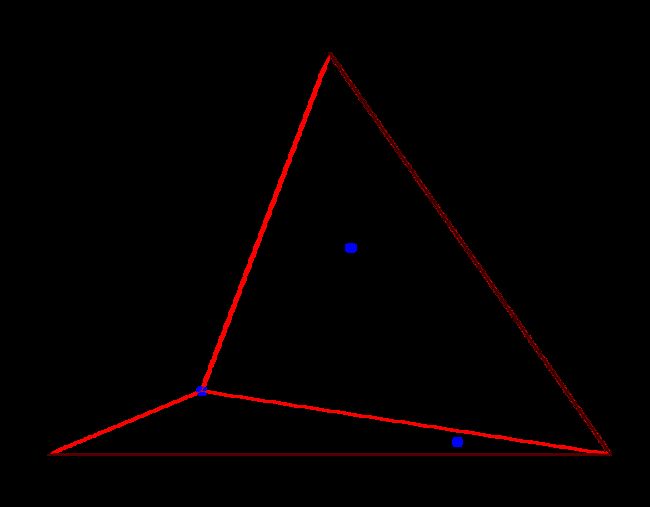
根据离散点的最大分布来求得随机一个超级三角形(超级三角形意味着该三角形包含了点集中所有的点)
我的方法是根据相似三角形定理求得与矩形一半的小矩形的对角三角形,扩大一倍后则扩大后的直角三角形斜边经过点(Xmax,Ymin)
但是为了将所有的点包含在超级三角形内,在右下角对该三角形的顶点进行了横和高的扩展,并要保证这个扩展三角形底大于高,才能实现包含
这样求得的超级三角形不会特别大使得计算复杂,而且过程也简单,并将超级三角形放入temp triangles中
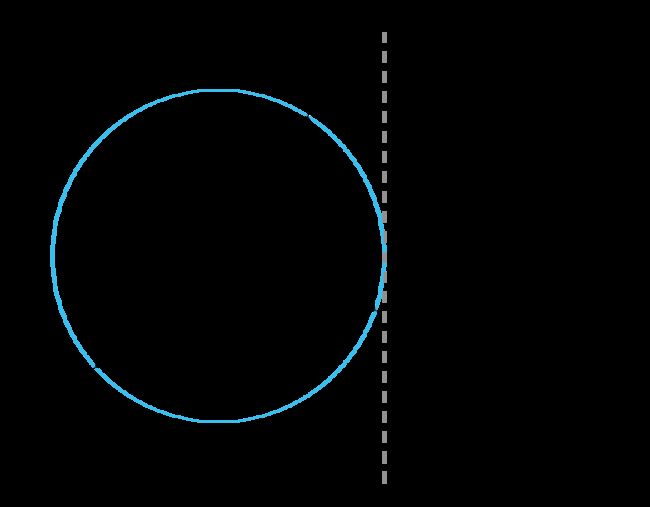
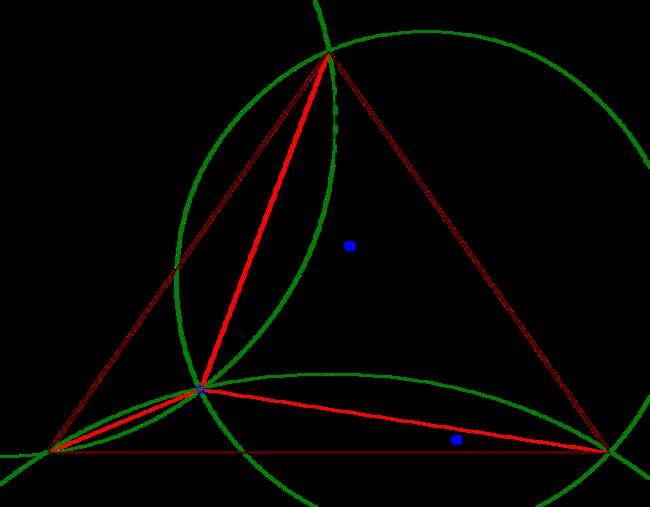
接下来就像是伪代码中描述的那样,对temp triangle中的的三角形遍历画外接圆,这时先对左边的第一个点进行判断,其在圆内
所以该三角形不为Delaunay三角形,将其三边保存至edge buffer中,temp triangle中删除该三角形
将该点与edge buffer中的每一个边相连,组成三个三角形,加入到temp triangles中
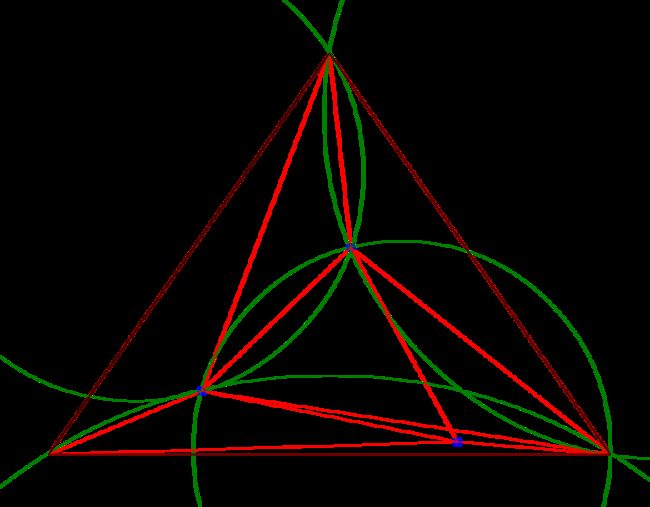
再将重复对temp triangles的遍历并画外接圆,这时使用的是第二个点来进行判断
- 该点在三角形1外接圆右侧,则表示左侧三角形为Delaunay三角形,将该三角形保存至triangles中
- 该点在三角形2外接圆外侧,为不确定三角形,所以跳过(后面会讲到为什么要跳过该三角形),但并不在temp triangles中删除
- 该点在三角形3外接圆内侧,则这时向清空后的edge buffer加入该三角形的三条边,并用该点写edge buffer中的三角边进行组合,组合成了三个三角形并加入到temp triangles中

再次对temp triangles进行遍历,这里该数组里则含有四个三角形,一个是上次检查跳过的含有第一个点的三角形和新根据第二个点生成的三个三角形
- 该点在三角形1外接圆右侧,则该三角形为Delaunay三角形,保存至triangles中,并在temp triangles中删除
- 该点在三角形2外接圆外侧,跳过
- 该点在三角形3外接圆内侧,将该三边保存至temp buffer中,并在temp triangles中删除
- 该点在三角形4外接圆内侧,将该三边保存至temp buffer中,并在temp triangles中删除
这时,temp buffer 中有六条边,triangles中有两个三角形,temp triangles中有1个三角形
对temp buffer中的六条边进行去重,得到五条边,将该点与这五条边组合成五个三角形并加入到temp triagnles 中,这时temp triangles中有6个三角形
由于三个点已经遍历结束,到了不会再对第三个点形成的三角形做外接圆,这时则将triangles与temp trianlges合并,合并后的数组表示包含已经确定的Delaunay三角形和剩下的三角形
这时除去合并后数组中的和超级三角形三个点有关的所有三角形,即进行数组坐标的限定,则得到了最后的结果:
问题
在用点对三角形外接圆位置关系进行判断的时候,为什么点在外接圆的右侧的话可以确定该三角形是Delaunay三角形
而当点外接圆的外侧且非右侧时,为什么要路过三角形,不把该三角形确定为Delaunay三角形呢?
首先,我们在开始的时候对原始方法进行优化时,我们增加了一个indices数组来操作vertices,并对indices依据vertices的x坐标进行了从小到大的排序
则我们在后面遍历点时是从点集的最左侧开始的,如图: