超声波相关——上位机
QT5串口编程——编写简单的上位机
https://blog.csdn.net/u014695839/article/details/50611549
首先,QT5是自带QSerialPort这个类的,使用时需要在pro文件里面添加一行:
QT += serialport
然后直接引用头文件就可以了。
#include //提供访问串口的功能
#include //提供系统中存在的串口的信息
在QT5中,串口通信是借助一个QSerialPort的对象来实现的,在设置QSerialPort对象对串口的名称、波特率、数据位、校验位、停止位等参数后,方能对串口进行读写。下面,我总结了一下借助QSerailPort对串口进行设置、打开、读、写和关闭的过程。
一、设置和打开串口
//创建串口对象
QSerialPort serial;
//设置串口名
serial.setPortName("COM3");
//设置波特率
serial.setBaudRate(QSerialPort::Baud9600);
//设置数据位数
serial.setDataBits(QSerialPort::Data8);
//设置奇偶校验
serial.setParity(QSerialPort::NoParity);
//设置停止位
serial.setStopBits(QSerialPort::OneStop);
//设置流控制
serial.setFlowControl(QSerialPort::NoFlowControl);
//打开串口
serial.open(QIODevice::ReadWrite);
以上代码是QSerialPort对象的设置示例,作用是:
-
设置串口名为 COM3
-
设置波特率为9600
-
设置数据位为8位
-
设置没有奇偶校验位
-
设置停止位为1位
-
设置没有流控制
-
以可读写的方式打开串口
设置完这些就能进行读写操作了。如果遇到不理解的地方,可以选择QT的类或函数,然后按F1查阅手册。举个例子,如果我们想查看QSerialPort的其它的属性,可以选择QSerialPort的类名或成员函数,然后按F1。
二、读取数据
//从接收缓冲区中读取数据
QByteArray buffer = serial.readAll();
串口在收到数据后,会将数据存入接收缓冲区。此时,我们可以通过readAll()函数将接收缓冲区的数据读出来。当串口的接收缓冲区有数据时,QSerilaPort对象会发出一个readyRead()的信号。因此,我们可以编写一个槽函数来读数据,例如:
//连接信号和槽
QObject::connect(&serial, &QSerialPort::readyRead, this, &MainWindow::serialPort_readyRead);
……
//编写的槽函数
void MainWindow::serialPort_readyRead()
{
//从接收缓冲区中读取数据
QByteArray buffer = serial.readAll();
//处理数据
//……
}
三、发送数据
serial->write(data);
使用write函数便可以把字节数组中的字节发送出去。
四、关闭串口
serial->close();
串口不用时,可通过close()函数将其关闭。
接下来是一个实例
1、创建一个新的Widgets Appliaction工程
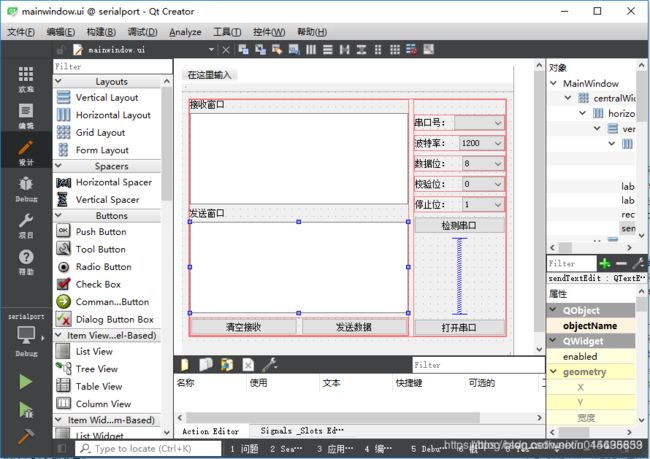
2、使用QtCreator的ui文件来设计上位机的界面,设计如下:
3、mainwindow.h文件内容如下:
//mainwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include
#include
#include
namespace Ui {
class MainWindow;
}
class MainWindow : public QMainWindow
{
Q_OBJECT
public:
explicit MainWindow(QWidget *parent = 0);
~MainWindow();
private slots:
void serialPort_readyRead();
void on_searchButton_clicked();
void on_openButton_clicked();
void on_sendButton_clicked();
void on_clearButton_clicked();
private:
Ui::MainWindow *ui;
QSerialPort serial;
};
#endif // MAINWINDOW_H
4、mainwindow.cpp文件内容如下:
//mainwindow.cpp
#include "mainwindow.h"
#include "ui_mainwindow.h"
#include
MainWindow::MainWindow(QWidget *parent) :
QMainWindow(parent),
ui(new Ui::MainWindow)
{
ui->setupUi(this);
//连接信号和槽
QObject::connect(&serial, &QSerialPort::readyRead, this, &MainWindow::serialPort_readyRead);
//发送按键失能
ui->sendButton->setEnabled(false);
//波特率默认选择下拉第三项:9600
ui->baudrateBox->setCurrentIndex(3);
}
MainWindow::~MainWindow()
{
delete ui;
}
void MainWindow::serialPort_readyRead()
{
//从接收缓冲区中读取数据
QByteArray buffer = serial.readAll();
//从界面中读取以前收到的数据
QString recv = ui->recvTextEdit->toPlainText();
recv += QString(buffer);
//清空以前的显示
ui->recvTextEdit->clear();
//重新显示
ui->recvTextEdit->append(recv);
}
void MainWindow::on_searchButton_clicked()
{
ui->portNameBox->clear();
//通过QSerialPortInfo查找可用串口
foreach(const QSerialPortInfo &info, QSerialPortInfo::availablePorts())
{
ui->portNameBox->addItem(info.portName());
}
}
void MainWindow::on_openButton_clicked()
{
if(ui->openButton->text()==QString("打开串口"))
{
//设置串口名
serial.setPortName(ui->portNameBox->currentText());
//设置波特率
serial.setBaudRate(ui->baudrateBox->currentText().toInt());
//设置数据位数
switch(ui->dataBitsBox->currentIndex())
{
case 8: serial.setDataBits(QSerialPort::Data8); break;
default: break;
}
//设置奇偶校验
switch(ui->ParityBox->currentIndex())
{
case 0: serial.setParity(QSerialPort::NoParity); break;
default: break;
}
//设置停止位
switch(ui->stopBitsBox->currentIndex())
{
case 1: serial.setStopBits(QSerialPort::OneStop); break;
case 2: serial.setStopBits(QSerialPort::TwoStop); break;
default: break;
}
//设置流控制
serial.setFlowControl(QSerialPort::NoFlowControl);
//打开串口
if(!serial.open(QIODevice::ReadWrite))
{
QMessageBox::about(NULL, "提示", "无法打开串口!");
return;
}
//下拉菜单控件失能
ui->portNam
eBox->setEnabled(false);
ui->baudrateBox->setEnabled(false);
ui->dataBitsBox->setEnabled(false);
ui->ParityBox->setEnabled(false);
ui->stopBitsBox->setEnabled(false);
ui->openButton->setText(QString("关闭串口"));
//发送按键使能
ui->sendButton->setEnabled(true);
}
else
{
//关闭串口
serial.close();
//下拉菜单控件使能
ui->portNameBox->setEnabled(true);
ui->baudrateBox->setEnabled(true);
ui->dataBitsBox->setEnabled(true);
ui->ParityBox->setEnabled(true);
ui->stopBitsBox->setEnabled(true);
ui->openButton->setText(QString("打开串口"));
//发送按键失能
ui->sendButton->setEnabled(false);
}
}
void MainWindow::on_sendButton_clicked()
{
//获取界面上的数据并转换成utf8格式的字节流
QByteArray data = ui->sendTextEdit->toPlainText().toUtf8();
serial.write(data);
}
void MainWindow::on_clearButton_clicked()
{
ui->recvTextEdit->clear();
}
5、main.cpp文件内容如下:
#include "mainwindow.h"
#include
int main(int argc, char *argv[])
{
QApplication a(argc, argv);
MainWindow w;
w.show();
return a.exec();
}
4、测试(将USB转TTL模块发送和接收引脚短接,自己发自己收)

做一个最简单的上位机
https://blog.csdn.net/qq_32840087/article/details/79375477
准备工作
我安装的是QT5.8,QTcreater 4.1.0。由于在官网下载比较麻烦,所以可以再这个镜像网站上下到适合自己版本的QT。
http://mirror.bit.edu.cn/qtproject/archive/qt/5.1/5.1.0/。
可能用到的软件1.串口调试助手 2虚拟串口。
然后先制作一个最简单可以查看接收数据的上位机(上面的教程)
https://blog.csdn.net/u014695839/article/details/50611549
关于Qt5 QtSerialPort串口通信:
https://blog.csdn.net/lovebird_27/article/details/49515881
Qt5实现串口通信:
https://blog.csdn.net/wamani/article/details/52849043
串口通信的概念非常简单,串口按位(bit)发送和接收字节。尽管比按字节(byte)的并行通信慢,但是串口可以在使用一根线发送数据的同时用另一根线接收数据。
在低版本QT中是没有QSerialPort的串口类的,制作上位机会复杂许多。QT5是自带QSerialPort这个类的,但是在使用时,我们需要在.Pro文件中添加一行才可以使用。在之后Debug过程中如果会再报错的话,再添加到.pro文件中
QT+= core gui//使用GUI界面
QT+= serialport//使用自带串口类
打开界面文件下的.ui文件可以对我们上位机的界面进行编辑
从左侧工具栏中选择要用的工具拖到
添加textEdit 作为数据接收显示框,combobox作为串口选择框 pushubutton作为打开串口按钮,这样最基本的界面就完成了!

双击combox对串口进行编辑,右键点击 open port 按钮 转到槽,可以对单击按钮后的事件进行编辑。
接下来就是函数部分
在QT中我们用到了哪个函数需要在.h文件开始处声明,自定义函数以及自定义变量 都需要在头文件.h文件中事先声明,在这里声明的变量为全局变量。
首先在文件开始处添加
#include
#include
QSerialPort:提供访问串口的功能
QSerialPortInfo:提供系统中存在的串口的信息
1.设置串口
对串口设置如下
void weite::on_openportbutton_clicked()
{ if(ui->portnamebox->isEnabled())
{
ui->openportbutton->setText("ClosePort"); //按下“OpenPort”后,按键显示为“ClosePort”
ui->portnamebox->setDisabled(true); //按下“OpenPort”后,禁止再修改COM口
serial1.setPortName(ui->portnamebox->currentText()); //设置COM口
serial1.setBaudRate(QSerialPort::Baud115200,QSerialPort::AllDirections);//设置波特率和读写方向
serial1.open(QIODevice::ReadWrite);
// connect(&serial1,SIGNAL(readyRead()),this,SLOT(read_com())); //把串口的readyRead()信号绑定到read_Com()这个槽函数上
}
else
{
ui->openportbutton->setText("OpenPort"); //按下“ClosePort”后,按键显示为“OpenPort”
ui->portnamebox->setEnabled(true); //按下“ClosePort”后,COM口可被修改
serial1.close(); //关串口
}
}
2.接收数据
当串口收到数据并且接收完毕后,会发出一个readyRead()的信号,因此只需要编写一个槽函数read_com(),设置信号槽,并在槽函数中使用readAll()把收到的数据读到requestData中。
3.数据显示
这里我们用了自带的append 函数来显示收到的数据 ,使用toHex()函数来将收到的8位ascii码 转换为16进制字符型显示
(在使用QT过程中在使用某个函数前,可以上网搜索其功能,QT中也自带帮助功能,按下F1可以查看某个函数功能及示例)
2和3部分代码如下
void weite::read_com()
{
QByteArray requestData;
requestData= serial1.readAll();
// qDebug()<<"---hsy--test--showtable---1";
QString buf ;
// requestData.clear();
ui->textEdit->append(requestData.toHex());
}
到这里我们最简单的上位机制作便完成了,可以连接上不需要启动信息的(串口设备)传感器来测试我们上位机效果。
IMU传感器的上位机
和最简单的上位机比起来,我们需要增加一个数据解析部分,也就是将接受到的传感器信息进行译码,得到我们可以直接读取的信息。我们可以从传感器的说明书上得到数据的通讯协议 比如这个

那么从这里我们可以知道 以A5 5A为头 AA为尾的这样一组数据就是我们要进行译码的数据。
我们利用readall()函数读到的的内容是一存到了requestData中,数据类型为Qbytearry(数组类型Qbytearry为QT中独特的数据类型,既可以存储字符串,又可以存储数)我们可以转化为整型(int类型)再进行进一步解算。(对于计算机来说0x01和1没有区别)
这里先将requestData存入缓冲区然后进行转存到str(string字符串类型存入其中数据以字符串形式存入)中,由于每一段的数据帧的长度为20个字节所以识别头0xaa到尾0xa2的长度应该为20字节然后 这二十个字节的数据分别存到了record[1]到record[20]中,令尾部0xaa为k那么距离他21个字节处便是0xa2,record1[k-19]和record1[k-19]便分别为加速度数据的高8位和低8位,高8位乘上256(2的8次方)加上低8位=t1.t1便是带符号的最终数据,最后将t1与0x8000做与运算判断最高位符号位,并做处理。
最终显示在面板上的数据 加速x.对其他数据依次做这样处理,依次显示在面板上.效果图如下。

ACX.sprintf("%f",t1*(9.8)/4089);
if(!requestData1.isEmpty())
{ long len,k;
QBuffer buffer(&requestData1);
//只写模式打开缓冲区
buffer.open(QIODevice::ReadWrite);
buffer.write(requestData1);
if(!requestData1.isEmpty())
{
//qDebug()<<"1";
static quint8 record[2048];
static quint8 record1[2048];
const char*str =buffer.data();
const char*str1 =buffer.data();
len =buffer.size();
for(k=0;kAX->setText(ACX);
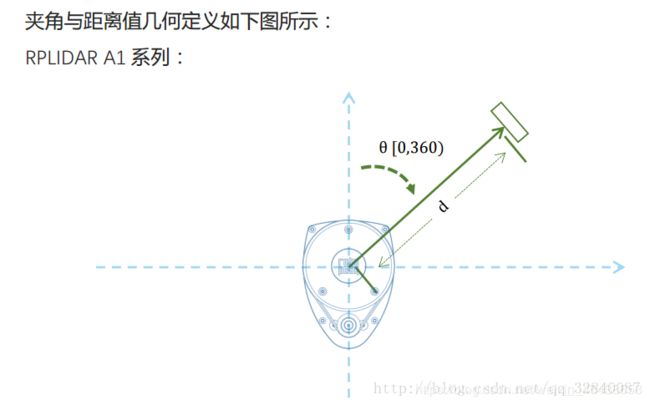
激光雷达部分
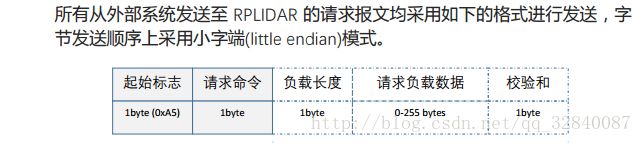
阅读说明书可以看到雷达基本通讯模式“与 RPLIDAR 进行的通讯采用非文本形式的二进制数据报文进行,且每个数据报文均具有统一的报头数据格式。外部系统在发送开始扫描的请求后,RPLIDAR 将开始连续的扫描测距。在每次测距操作完成后,对应的测距采样点的信息(距离、角度等)将通过一个独立应答包的形式发送至外部系统。在这个模式下,外部系统只需要发送单次的请求,并开始连续接受来自 RPLIDAR 的多个应答数据文报。”
请求报文格式
常用请求报文

开始扫描采样(SCAN)命令请求与回应数据格式:
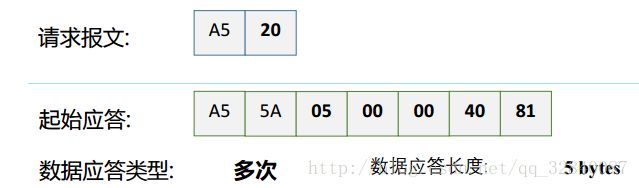
PLIDAR 工作在空闲状态时,在外部系统发送了该请求后,将开始进入测距采样。每个测距采样点将使用数据应答报文发送至外部系统。如果 RPLIDAR先前已经工作在测距采样状态,则 RPLIDAR 首先将停止正在进行的测距采样功能,并重新开始新一轮的测距采样操作。
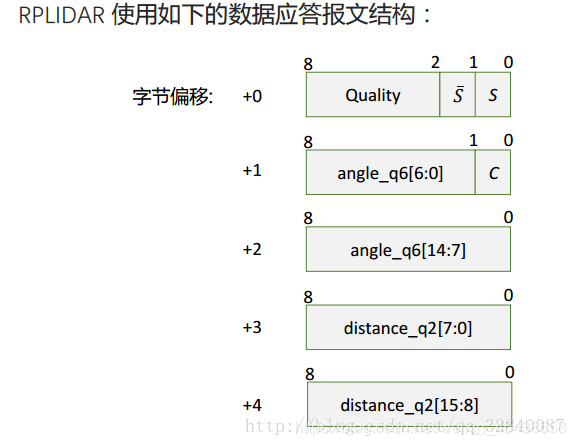
在收到起始应答回复之后雷达开始不断返回采集的数据。每五个字节为一组,第一个字节第一位是标志位,第二位是取标志位的反,他们两个在任何时刻一个为0,另一个必为1,第二个字节第一位是校验位,通过这三个字节我们可以验证编写的是否有错误。第一字节的第三位到第8位是信号质量。第二个字节的第二位到第8位为角度angel的低7位,第3个字节为第8位到第14位。
第四个字节和第五个字节分别为距离distance的低8位与高8位。


数据的存储
按下界面上的开始采集按钮,同时开始IMU与激光雷达数据采集,IMU数据的采集,采集的面板数据,采用定时器Qtimer定时,每20ms向IMU数据中写入换行符 进行换行。每行
激光雷达则是将换行符写入了存储数据的循环内,每行为512个采样点,约为0.25s。
激光雷达数据
void Widget::on_kscj_clicked()
{//在c盘下创建以开始采集时间命名的激光雷达数据文档
serial.open(QIODevice::ReadWrite);
QDateTime time = QDateTime::currentDateTime();
QString date = time.toString("yyyy-MM-dd hh-mm-ss "); //设置显示格式
fileName = "C:/" + date + ".txt";
file.setFileName(fileName);
if(!file.open(QIODevice::ReadWrite | QIODevice::Text))
serial.write(StringToHex("A5 25"));
serial.write(StringToHex("A5 20"));
ui->stateLab->setText("当前状态 : 普通扫描指令已经发送");
//在d盘下创建以开始采集时间命名的IMU数据文档
fileName1 = "D:/" + date + ".txt";//
file1.setFileName(fileName1);
}
杜洋的简单上位机制作
https://www.bilibili.com/video/av38980254?from=search&seid=7839098653315187718