AR+SLAM
一、概述
图像处理领域涉及
AR的技术可以抽象为这么一类技术:
*通过图像和其他传感器信息计算摄像机的位置和图像内环境三维结构信息,并结合3D渲染提供更自然的人机交互能力。*
如图1所示,位置和结构信息一般包括相机机位(Camera Pose)和点云/3D模型(Point Cloud/Mesh),不同的技术问题,侧重点不同。
图1 AR相关技术关系图
Marker/Markerless Tracking只关注相机机位的跟踪,这也是AR最开始的一类技术,它的技术指标主要要求运算速度快,保障实时性,还有就是跟踪稳定且不易跟丢。Marker一般是一张2D的图片,因此处理相对简单,世界坐标系往往就以Marker所在平面为XY轴平面,以垂直于该面的法向量为Z轴。通过将摄像机图像上的特征点和Marker中的特征点进行匹配,就可以计算出摄像机相对于Marker的位置,如图2所示。
图2 Marker AR原理图
IMU(惯性传感单元)是现代智能手机几乎都配备的元件,通过IMU可以准确获取手机(相机)的旋转维度的变换,但是对于空间位移很难准确衡量,所以IMU经常作为其他技术的辅助,比如SLAM。
SLAM(同时定位并建图),顾名思义,它的目的同时包括了计算Camera Pose和扫描环境三维结构信息,和它非常类似的是SFM(Structure From Motion),二者最大的区别在于SFM常用于3D重建,一般对重建的结构细节以及精细度要求甚高,重建的后结果多是面向用户,对美观度也有一定要求,因此一般只能离线处理;而SLAM应用场景包括AR、机器人控制等等,一般要求实时性,所以扫描的环境结构信息一般相对粗糙,而环境的信息也主要为了辅助自身的定位。SLAM/SFM相比于Marker Tracking的最大区别在于事先并不知道任何三维空间的信息,需要首先从两张二维的图像(有一定的视差)中恢复三维结构(如图3所示),继而不断的跟踪并扩张地图。SLAM建立的3D地图的坐标系是随机的,而后面提到我们做了一个有趣的改进是可以通过一张Marker作为SLAM的初始地图,从而使得SLAM的坐标系可以确定。

图3 从二维图片恢复三维结构
3D Object Tracking,即三维物体跟踪,这个问题既类似于Marker的跟踪也类似于SLAM,Maker Tracking是计算2D的图片相对于的相机的位置,SLAM解决的其中一个问题是在构建好的三维点云中,准确定位到自身的位置并持续跟踪;3D Object Tracking要解决的问题是准确定位到3D物体相对于相机的位置。和Marker Tracking相比,是把跟踪2D的图片升级为跟踪3D的物体,区别在于2D的图片始终位于三维空间中的一个平面上,方便构建点云和世界坐标系。和SLAM相比,SLAM构建好的环境和自己的要定位的环境必须是相对稳定的,而3D物体识别时,背景信息往往是变化的。3D Object Tracking需要的先验知识一般是一个3D模型,这个模型有时候可以通过SLAM或者SFM得到。
Object Segmentation,即物体分割,是在摄像机图片中将指定的物体分割出来或是将前景后景分离开来。这类问题实现方法很多,其中有一类是利用物体3D模型的信息将图片中的物体找到并分离出来,同时还可以准确计算3D物体相对于Camera的位置。这类技术又和3D Object Tracking有相辅相成的作用,比如如果能够对物体先进行分离,那么跟踪就会变得简单些,反之,如果先能够追踪到物体的位置,那么对物体进行分离也相对容易。
在基于单目的摄像头的AR技术中,特征点(Feature)是最通用的一项技术手段,通过匹配不同帧图像之间特征点的对应关系,我们才能够准确计算相机的运动,从而恢复环境三维结构。特征点相关算法很多,在移动端,为了提高计算效率,倾向使用ORB和Freak,比如SLAM中我们就使用了ORB特征,Marker Tracking中我们使用了Freak特征;而类似SIFT这种,匹配精度高,但是运算效率低,一般用于SFM这类技术中。使用特征点的好处在于,特征具有良好的尺度不变形、方向不变形和光照不变形等特性,匹配结果较为鲁棒。光流法(Optical Flow)是相对于特征点的另一类跟踪相机运动的方法,它的基本原理是不去计算特征点以及特征描述子,而是直接使用像素块进行匹配,提高了运算效率,而其缺点是光流法只适合匹配相邻的两帧图像来计算运动变化,它要求光强度守恒(Brightness Consistency),所以无法用于重定位等技术实现。
每项AR技术背后都孕育着一些新型的业务形态,AR业务主要围绕营销互动和实用工具两类展开,如图5所示。最早的Marker Tracking催生了AR互动营销,AR教育等业务的发展,手淘的ARMagic互动平台就是依赖此技术建立起来;SLAM技术支撑了AR实景宝贝,让3D的商品能够更加自然地进入用户的视野;AR捉猫猫也是依靠IMU在AR中的应用才得以铺展开来。更重要的是这些技术潜力还未完全释放,在现有技术体系中我们已经规划了未来一些业务的蓝图:
AR说明书,通过AR的方式展示实际生活、生产环节中一些器械的使用方式或是工作原理。比如家电(洗衣机、电饭煲等)的3D形式的说明书(如图4所示),工厂内一些机器的虚拟操作指南等。这项业务主要依托于3D Object Tracking和SLAM技术。
图4 AR说明书示例图
AR场景互动,在一些线下场景(商场、休闲场所、博物馆等),通过AR的方式完成的更加自然、丰富的互动。比如目前规划的上海星巴克新概念旗舰店,就计划利用AR的方式展示店内的传统机器和传统工艺的历史,让用户能够用AR的方式探索星巴克的历史文化。同时,结合支付、物流等环节,完成一体化的有趣购物体验。
AR直播/AR视频,在直播的场景通过布置一些特殊的“标记”,在直播和视频中叠加更为丰富的互动特效。
AR业务的形式优势不仅仅在于新颖,而是它通过摄像头打通了虚拟和现实世界,也就有了天然的贯通线上和线下的优势,是进行“新零售”的探索一个利器。
图5 AR技术体系和业务关系图
二、SLAM技术
提到SLAM开源项目,自然先想到大名鼎鼎的ORB-SLAM。首先简单介绍下ORB-SLAM2的算法结构。如图6所示,ORB-SLAM2主要分为三个线程,Tracking用于跟踪Camera Pose,LocalMapping用于构建点云地图,Loop Closing用于闭环检测,优化点云位置。Place Recognition,即重定位,是利用BoW(Bag of Words)模型在已经构建好的地图内定位Camera。虽然ORB-SLAM2整体效果在众多开源项目中脱颖而出,但他仍然只是一个实验室产品,距离真正的实用还需要很多工作要做。将该项目移植到移动端后,其性能表现如下:
1. iPhone7 Plus, 15FPS; Android 三星Note7 1-2FPS
2. BoW词库大小140M,加载时间8秒,占用内存400+M
3. 位置跟踪不稳定,存在抖动
4. 代码存在很多Bug,尤其内存泄露非常严重

图6 ORB-SLAM2
因此,SLAM技术在移动端的应用必须能够突破“硬件资源有限”这个障碍。
三 函数表达
本文来自简书,原文地址:http://www.jianshu.com/p/d7dcf46f3705
ARKit
AR(Argument Reality)大家都知道,就是将3D模型渲染在摄像头图像之上,混合渲染达到虚拟物品就好像是现实的一部分。ARKit解决了模型定位难的问题,结合CoreMotion运动数据与图像处理数据,来建立一个非常准确的SLAM系统,构建虚拟世界和现实世界之间的映射。同时能够分析环境自动给模型添加光源,实际效果还是比较惊艳的。
从结构上看,ARKit提供了一套简单易用的AR框架,但框架之外,需要很多的三维空间、游戏编程、3D模型、GPU渲染的知识来理解AR技术。ARKit最重要的两个类是ARSession与ARSCNView
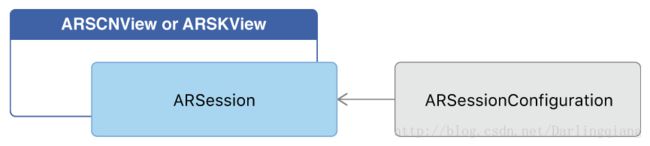
类似与AVFoudation,ARKit中由ARSesseion类来配置SLAM系统的建立。设置ARSession的配置选项为ARWorldTrackingSessionConfiguration来追踪设备的方向与位置,并且能够检测平面。这个选项只有A9处理器之上才支持。其他型号处理器(6S以下)只能追踪设备的方向。
ARKit的提供了自带的两个渲染类:ARSCNView和ARSKView,后者用来渲染2D模型。之前鲜有问津的SceneKit算是有了用武之地。这两个类会自动开启摄像头并建立虚拟空间与现实空间之间的映射。同时ARKit也支持自定义用OpenGL或Metal实现渲染类,但要自己管理与ARSession之间的通信,同时要遵循iOS GPU命令不能在后台调用的规则。
其他比较重要的类有ARAnchor、ARHitTestResult、ARFrame、ARCamera。
- ARAnchor
世界中点,可以用来放置虚拟物品(锚点),也可以代指现实物品的放置位置。ARAnchor在世界中是唯一的,并包含仿射变换的信息。
- ARHitTestResult
HitTest的返回,世界中的ARAnchor。
与UIKit中的hitTest不同,ARKit的HitTest以设备方向配合视图坐标,建立一条世界中的射线,所有在射 线上的ARAnchor, 会以由近到远的方式返回。此外SCeneKit的HitTest返回虚拟物品。
- ARFrame
摄像头视频帧的包装类,包含位置追踪信息、环境参数、视频帧。重点是它包含了苹果检测的特征点,通过rawFeaturePoints可以获取,不过只是特征的位置,具体的特征向量并没有开放。
- ARCamera
场景中的摄像机,用来控制模型视图变换和投影变换。同时提供6DOF(自由度信息,方向+位置)与追踪信息。
对ARKit的思考
从框架接口来看,ARKit 暴露出来的能力并不多且小心翼翼。
AR的能力,由三部分组成:
- 3D渲染
- 空间定位与方向追踪
- 场景理解(检测与识别)
目前看 ARKit 只提供了3D渲染的入口,其他两个都被封装起来了,所以目前来看渲染是差异化的主要途径,但不唯一。ARKit workShop 上,面对大家提出的苛刻问题,苹果工程师大量提到特征点。其实计算机视觉是可以在场景理解这一层面做一些自定义的。如果苹果开放更多的能力,那AR的能力完全可以作为任何一个APP的特性。
此外,ARKit还存在一些问题:
- ARKit 是基于惯性-视觉来做空间定位的,需要平稳缓慢的移动+转向手机,才能构建更加准确的世界,这对用户来说是一种考验,需要积极提示。
- 理论上 ARKit 在双目摄像头上的表现应该优于单目,这里需要具体测试,如何来平衡用户体验。
- .scn文件还是知识一个简单的3维模型编辑器,支持的文件格式少,对模型、光照的编辑方式不太友好。对骨骼动画的支持还有只在能用的阶段。
- 一旦刚开始检测平面失败,出现时间久,飘逸的现象,后期很难再正确检测,要强制重启。
ARKit最佳实践
模型与骨骼动画
- 如果是使用.dae 转 .scn 文件,资源中包含骨骼动画时,加载.scn文件到 scene 中会丢失动画,需要在加载时手动恢复一下(方法)。
- 设计骨骼动画是,要求设计师把动画放在根节点上,不要分散地放在每个bone上,这样可以方便地读取出动画到
CAAnimation。 - 最好不要将太远的光照加载模型文件中,这样会导致加载文件到
SCNNdoe时,你的 node 真实尺寸特别大,而你期望的尺寸可能只是模型对象的大小。 - 模型的
SCNMaterial是用 physically based lighting model 会有更好的表现,设置比较好的环境光也比较重要。
光照
- 合理的阴影会大大提高AR的效果,贴一张纹理当然可以,但动态阴影更让人沉浸,我们还是要有追求的。
- 使用Bake ambient occlusion(ABO)效果,模型会更逼真。
- 光照node加载到
SCNScene的rootNode上,这对做碰撞检测尤其重要
ARKit workShop
1 . ARFrame提供的YUV特征,如何获取RGB特征?
答:使用Metal去获取特征点的RGB值。
(这个我一般是用OpenGL的shader去做,我想苹果工程师是说将图像用Metal转成位图后,根据坐标去获取RGB值。但特征点不多的话,直接在CPU中利用公式计算一下不就行了吗?不过也许Metal有更强大的方法。)
2 . ARKit中怎么做虚拟环境?
答:利用Cube背景。
(这个在VR中用的比较多,就是用一个贴满背景的立方体包裹住摄像机所在的空间,网上的资料较多。)
3 . ARKit的如何模拟光源的?为什么不产生阴影。
答:ARKit通过图像的环境来设置模型的环境光强度,而环境光是不产生阴影的。
(我猜苹果应该是通过像素值来确定环境光的,如果用高级一点的方法完全可以添加直射光。光照有许多模型,只有带方向的光才会产生阴影,如果想用ARKit做出阴影,可以看https://stackoverflow.com/questions/30975695/scenekit-is-it-possible-to-cast-an-shadow-on-an-transparent-object/44774424#44774424。)
4 . AVFoudation与ARSession之间的切换会有问题吗?
答: ARSession底层也是用AVFoudation的,如果重新打开ARKit,只需要重新 run 一下ARSession 可以了,但切换时会有卡顿。
(试了一下,切换时确实有轻微的卡顿,切换后ARSession就停止摄像头采集了,但3D渲染会继续,只是丧失了空间定位与检测识别的能力。)
5 . ARKit是否支持前置摄像头?
答:不支持。ARKit并不是一个用于前置摄像头环境的技术,因为空间有限,能提供的信息也非常有限。
(这个问题是很多参会者关心的问题,但 ARKit 团队似乎不是很 care ,说到底还是因为前置摄像头的场景中,用户很少会移动,画面中一般大部分都是人脸,这样 ARKit 的定位与检测能力无法很好使用。建议由类似需求的同学好好梳理,是不是想要的是3D渲染而不是AR。
6 . ARKit的最大应用范围是多少?
答:100米是 ARKit 在保持较好用户体验的最大测量距离。
(这个其实我有点没太听清,实际数字应该是100米以上)
7 . ARKit如何做marker?
答:ARKit不会提供这样的能力,如果想实现的,可以用 ARKit 提供的特征点来跑自己的计算机视觉。
(熟悉计算机视觉的同学应该都明白,其实marker就是一种简单的图像识别,如果 ARKit 提供的特征点可靠的话,完全可以自己做特征匹配。现场问了苹果工程师,他们的特征点是什么特征,他们不愿回答,不过看使用场景的话,应该是一种边缘敏感的低维特征,应该类似 PCA + SURF)。
8 . ARKit合适支持A8?性能如何?
答:支持A8处理器并不在计划中(这里指的是空间定位能力,A8只支持空间方向追踪),ARKit 的大部分计算都是在CPU上处理的,在A8处理器上的性能损耗在 15% ~ 25%, 在A9处理器上的性能损耗在 10% ~ 15%。
(看他们的意思,大量的计算,在A8上应该是比较低效的,解释了为什么A8上的追踪能力是阉割版的。性能应该说还不错,与游戏类似)
9 . 如何追踪实际的物体?
答:可以在已识别的物体位置上,添加一个node, 这样就能在之后的处理中一直保持这个物体的追踪。
(这次的wrokShop,苹果大量提到他们的特征点,如果他们真的足够重视的话,应该开放特征检测的过程与特征向量,希望后期能够开放吧)
10 . 如何连接两个不同 ARKit 世界?
答:ARKit没有计划支持这些,比较 tricky 的做法是将两个手机紧挨着启动ARKit。
(这个也是很多参会者关注的问题,相信不少人已经有了自己的解决方案,这里我后期会出一篇文章讲解。)
AR相关
渲染
AR说到底还是一种游戏技术,AR提供了定位、检测平面的功能,这些功能并没有暴露出来供我们自定义,那么只能在渲染方面做出差异。
目前ARKit支持的3D渲染引擎,有sceneKit,Unity3D,UE。后两者都是成熟的游戏引擎,能够提供完整的游戏功能,但没有我们没有使用,主要因为:
- 上手较慢,iOS11 9月中旬就要发布了,时间紧促。
- 接入Unity3D会给安装包造成很大压力,成本大约10M。
最终决定还是用sceneKit,主要出于一下考虑:
- ARKit目前对Unity3D,UE的支持没有sceneKit好。
- sceneKit用OC写,可以OCS。
- sceneKit是系统动态库,对安装包压力不大。
- sceneKit虽然能力弱,但是对于AR来说足够了,AR毕竟打造不了复杂的游戏。
坐标系
ARKit和OpenGL一样,使用右手坐标系, 这个新建一个camera就可以看出来。

定位
将模型加载到空间中,需要6个自由度(6DOF)的信息来指定模型的表现:

分别是沿三个坐标轴的平移与旋转。
可以使用旋转矩阵、欧拉角、四元数来定义空间旋转,ARKit的这三种方式均有运用。
- 旋转矩阵
这个好理解,使用旋转的变换矩阵即可,维度4*4,定义一次旋转需要16个数。
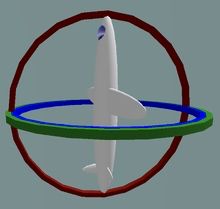
- 欧拉角
把空间旋转分解成绕三个局部坐标轴的平面旋转,分别是pitch(俯仰角,绕x轴),yaw(偏航角,绕y轴),roll(翻滚角,绕z轴),然后以一定顺序做旋转(sceneKit中是 roll -> yew -> pitch),欧拉角是使用三个 3*3 矩阵连乘实现,而且存在万向锁的问题。

当pitch为90°时,pitch与yew的旋转轴重合了,这时飞机丧失了一个旋转的维度。

- 四元数
追踪
visual-inertial odometry :基于视觉和惯性的测量方法,惯性数据是指角速度和加速度,这些都由Core Motion提供,加上图像特征,能够更准确地建立SLAM系统。ARKit会将提取到的特征点映射的空间中,也就是说特征点是由三维坐标的,我们可以利用特征点来确定图像中物体的远近。实测效果不错,误差在分米以内。