DBFace: 源码阅读(一)
DBFACE: 源码阅读
1. 背景
DBFace框架是可以同时获得人脸检测和关键点定位,相较与人脸检测和关键点定位分开的做法有一定的优势,减少了对原图的crop和resize操作,并且对多人脸的情况,这种操作是对人脸个数敏感的,后期倾向也是将人脸检测和关键点定位,甚至后期的segmentation放到一套代码中去完成了.
使用DBFace的原因主要还是算法很快,精度也不错!
2. 总体框架(App类)
代码的主体是作者创建了一个App类,其中主要是超参数的设定,网络结构的设定,三个loss的定义,数据的下载,训练的过程等
class App(object):
def __init__(self, labelfile, imagesdir, numlandmarks):
self.numlandmarks = numlandmarks # 增加关键点数量设置
self.width, self.height = 800, 800 # 输入图片大小是800*800,这个后续要减少,否则时间肯定不能满足
self.mean = [0.408, 0.447, 0.47]
self.std = [0.289, 0.274, 0.278]
self.batch_size = 18
self.lr = 1e-4
self.gpus = [0] # [0, 1, 2, 3]
self.gpu_master = self.gpus[0]
self.model = DBFace(has_landmark=True, wide=64, has_ext=True, upmode="UCBA") # 网络主体定义的部分
self.model.init_weights() # 初始化权重
self.model = nn.DataParallel(self.model, device_ids=self.gpus)
self.model.cuda(device=self.gpu_master)
self.model.train()
# 三个loss 的部分
self.focal_loss = losses.FocalLoss()
self.giou_loss = losses.GIoULoss()
self.landmark_loss = losses.WingLoss(w=2)
# 构建dataset部分,继承torch 的dataset类
self.train_dataset = LDataset(labelfile, imagesdir, numlandmarks, mean=self.mean, std=self.std,
width=self.width, height=self.height)
self.train_loader = DataLoader(dataset=self.train_dataset, batch_size=self.batch_size, shuffle=True,
num_workers=1)
# 优化器adam,使用默认的weight_decay=0
self.optimizer = torch.optim.Adam(self.model.parameters(), lr=self.lr)
self.per_epoch_batchs = len(self.train_loader)
self.iter = 0
self.epochs = 150
def set_lr(self, lr):
self.lr = lr
log.info(f"setting learning rate to: {lr}")
for param_group in self.optimizer.param_groups:
param_group["lr"] = lr
def train_epoch(self, epoch):
for indbatch, (images, heatmap_gt, heatmap_posweight, reg_tlrb, reg_mask, landmark_gt, landmark_mask, num_objs,
keep_mask) in enumerate(self.train_loader):
self.iter += 1
batch_objs = sum(num_objs)
batch_size = self.batch_size
if batch_objs == 0:
batch_objs = 1
heatmap_gt = heatmap_gt.to(self.gpu_master)
heatmap_posweight = heatmap_posweight.to(self.gpu_master)
keep_mask = keep_mask.to(self.gpu_master)
reg_tlrb = reg_tlrb.to(self.gpu_master)
reg_mask = reg_mask.to(self.gpu_master)
landmark_gt = landmark_gt.to(self.gpu_master)
landmark_mask = landmark_mask.to(self.gpu_master)
images = images.to(self.gpu_master)
hm, tlrb, landmark = self.model(images)
hm = hm.sigmoid()
hm = torch.clamp(hm, min=1e-4, max=1 - 1e-4)
tlrb = torch.exp(tlrb)
hm_loss = self.focal_loss(hm, heatmap_gt, heatmap_posweight, keep_mask=keep_mask) / batch_objs
reg_loss = self.giou_loss(tlrb, reg_tlrb, reg_mask) * 5
landmark_loss = self.landmark_loss(landmark, landmark_gt, landmark_mask) * 0.1
loss = hm_loss + reg_loss + landmark_loss
self.optimizer.zero_grad()
loss.backward()
self.optimizer.step()
epoch_flt = epoch + indbatch / self.per_epoch_batchs
if indbatch % 10 == 0:
log.info(
f"iter: {self.iter}, lr: {self.lr:g}, epoch: {epoch_flt:.2f}, loss: {loss.item():.2f}, hm_loss: {hm_loss.item():.2f}, "
f"box_loss: {reg_loss.item():.2f}, lmdk_loss: {landmark_loss.item():.5f}"
)
if indbatch % 1000 == 0:## 标题
log.info("save hm")
hm_image = hm[0, 0].cpu().data.numpy()
common.imwrite(f"{jobdir}/imgs/hm_image.jpg", hm_image * 255)
common.imwrite(f"{jobdir}/imgs/hm_image_gt.jpg", heatmap_gt[0, 0].cpu().data.numpy() * 255)
image = np.clip((images[0].permute(1, 2, 0).cpu().data.numpy() * self.std + self.mean) * 255, 0,
255).astype(np.uint8)
outobjs = eval_tool.detect_images_giou_with_netout(hm, tlrb, landmark, threshold=0.1, ibatch=0)
im1 = image.copy()
for obj in outobjs:
common.drawbbox(im1, obj)
common.imwrite(f"{jobdir}/imgs/train_result.jpg", im1)
def train(self):
# warm up?
lr_scheduer = {
1: 1e-3,
2: 2e-3,
3: 1e-3,
60: 1e-4,
120: 1e-5
}
# train
self.model.train()
for epoch in range(self.epochs):
if epoch in lr_scheduer:
self.set_lr(lr_scheduer[epoch])
self.train_epoch(epoch)
file = f"{jobdir}/models/{epoch + 1}.pth"
common.mkdirs_from_file_path(file)
torch.save(self.model.module.state_dict(), file)
3. DBFace类
这一类其实就是网络的结构的定义,作者选择使用CenterNet结构做检测任务,使用MobileNetV3-small做backbone,(mobilenet v1提出了depthwise convolution和pointwise convolution, mobilenet v2增加了expand dim 操作, mobilenet 3增加了SE,也就是channel attention部分, 增加了Hard-Swish Activation,但是如果要应用到前端,激活函数要使用比较常见的比较好吧, 类似sigmoid, relu这种, tanh都会有点问题…)
1. backbone 部分
# define backbone
self.bb = Mbv3SmallFast()
class Mbv3SmallFast(nn.Module):
def __init__(self):
super(Mbv3SmallFast, self).__init__()
self.keep = [0, 2, 7]
self.uplayer_shape = [16, 24, 48]
self.output_channels = 96
self.conv1 = nn.Conv2d(3, 16, kernel_size=3, stride=2, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(16)
self.hs1 = nn.ReLU(inplace=True)
self.bneck = nn.Sequential(
Block(3, 16, 16, 16, nn.ReLU(inplace=True), None, 2), # 0 *
Block(3, 16, 72, 24, nn.ReLU(inplace=True), None, 2), # 1
Block(3, 24, 88, 24, nn.ReLU(inplace=True), None, 1), # 2 *
Block(5, 24, 96, 40, nn.ReLU(inplace=True), SeModule(40), 2), # 3
Block(5, 40, 240, 40, nn.ReLU(inplace=True), SeModule(40), 1), # 4
Block(5, 40, 240, 40, nn.ReLU(inplace=True), SeModule(40), 1), # 5
Block(5, 40, 120, 48, nn.ReLU(inplace=True), SeModule(48), 1), # 6
Block(5, 48, 144, 48, nn.ReLU(inplace=True), SeModule(48), 1), # 7 *
Block(5, 48, 288, 96, nn.ReLU(inplace=True), SeModule(96), 2), # 8
)
def load_pretrain(self):
checkpoint = model_zoo.load_url(f"{_MODEL_URL_DOMAIN}/{_MODEL_URL_SMALL}")
self.load_state_dict(checkpoint, strict=False)
def forward(self, x):
x = self.hs1(self.bn1(self.conv1(x)))
outs = []
for index, item in enumerate(self.bneck):
x = item(x)
if index in self.keep:
outs.append(x)
outs.append(x)
return outs
下面代码是mobileNet v3 的block
class Block(nn.Module):
def __init__(self, kernel_size, in_size, expand_size, out_size, nolinear, semodule, stride):
super(Block, self).__init__()
self.stride = stride
self.se = semodule
self.conv1 = nn.Conv2d(in_size, expand_size, kernel_size=1, stride=1, padding=0, bias=False)
self.bn1 = nn.BatchNorm2d(expand_size)
self.nolinear1 = nolinear
self.conv2 = nn.Conv2d(expand_size, expand_size, kernel_size=kernel_size, stride=stride,
padding=kernel_size // 2, groups=expand_size, bias=False)
self.bn2 = nn.BatchNorm2d(expand_size)
self.nolinear2 = nolinear
self.conv3 = nn.Conv2d(expand_size, out_size, kernel_size=1, stride=1, padding=0, bias=False)
self.bn3 = nn.BatchNorm2d(out_size)
self.shortcut = nn.Sequential()
if stride == 1 and in_size != out_size:
self.shortcut = nn.Sequential(
nn.Conv2d(in_size, out_size, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(out_size),
)
def forward(self, x):
out = self.nolinear1(self.bn1(self.conv1(x)))
out = self.nolinear2(self.bn2(self.conv2(out)))
out = self.bn3(self.conv3(out))
if self.se != None:
out = self.se(out)
out = out + self.shortcut(x) if self.stride == 1 else out
return out
# SE part channel attention
class SeModule(nn.Module):
def __init__(self, in_size, reduction=4):
super(SeModule, self).__init__()
self.pool = nn.AdaptiveAvgPool2d(1)
self.se = nn.Sequential(
nn.Conv2d(in_size, in_size // reduction, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(in_size // reduction),
nn.ReLU(inplace=True),
nn.Conv2d(in_size // reduction, in_size, kernel_size=1, stride=1, padding=0, bias=False),
nn.BatchNorm2d(in_size),
nn.Sigmoid()
)
def forward(self, x):
return x * self.se(self.pool(x))
2. FPN 部分
在源代码中抽取了4层, stride4, stride8, stride16, stride32,这里的stride其实就是卷积中的设置的步长,有利于提取不同尺度的特征
# Get the number of branch node channels
# stride4, stride8, stride16
c0, c1, c2 = self.bb.uplayer_shape
self.conv3 = CBAModule(self.bb.output_channels, wide, kernel_size=1, stride=1, padding=0, bias=False) # s32
self.connect0 = CBAModule(c0, wide, kernel_size=1) # s4
self.connect1 = CBAModule(c1, wide, kernel_size=1) # s8
self.connect2 = CBAModule(c2, wide, kernel_size=1) # s16
self.up0 = UpModule(wide, wide, kernel_size=2, stride=2, mode=upmode) # s16
self.up1 = UpModule(wide, wide, kernel_size=2, stride=2, mode=upmode) # s8
self.up2 = UpModule(wide, wide, kernel_size=2, stride=2, mode=upmode) # s4
在forward的时候是按照如下操作:
s4, s8, s16, s32 = self.bb(x)
s32 = self.conv3(s32)
s16 = self.up0(s32) + self.connect2(s16)
s8 = self.up1(s16) + self.connect1(s8)
s4 = self.up2(s8) + self.connect0(s4)
举个例子,将stride为32的feature_map进行上采样,将得到的feature map 与stride16的feature map经过CBA操作后的feature map进行相加. 具体上采样在源码中有3种方式
# Up Sample Module
class UpModule(nn.Module):
def __init__(self, in_channels, out_channels, kernel_size=2, stride=2, bias=False, mode="UCBA"):
super(UpModule, self).__init__()
self.mode = mode
if self.mode == "UCBA":
# self.up = nn.UpsamplingBilinear2d(scale_factor=2)
self.up = nn.UpsamplingNearest2d(scale_factor=2)
self.conv = CBAModule(in_channels, out_channels, 3, padding=1, bias=bias)
elif self.mode == "DeconvBN":
self.dconv = nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride, bias=bias)
self.bn = nn.BatchNorm2d(out_channels)
elif self.mode == "DeCBA":
self.dconv = nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride, bias=bias)
self.conv = CBAModule(out_channels, out_channels, 3, padding=1, bias=bias)
else:
raise RuntimeError(f"Unsupport mode: {mode}")
def forward(self, x):
if self.mode == "UCBA":
return self.conv(self.up(x))
elif self.mode == "DeconvBN":
return F.relu(self.bn(self.dconv(x)))
elif self.mode == "DeCBA":
return self.conv(self.dconv(x))
其中的CBA就是常规的Conv+BN+Activation
# Conv BatchNorm Activation
class CBAModule(nn.Module):
def __init__(self, in_channels, out_channels=24, kernel_size=3, stride=1, padding=0, bias=False):
super(CBAModule, self).__init__()
self.conv = nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding=padding, bias=bias)
self.bn = nn.BatchNorm2d(out_channels)
self.act = nn.ReLU(inplace=True)
def forward(self, x):
x = self.conv(x)
x = self.bn(x)
x = self.act(x)
return x
3. SSH 检测
从论文中截下来的module如下,也不是很复杂
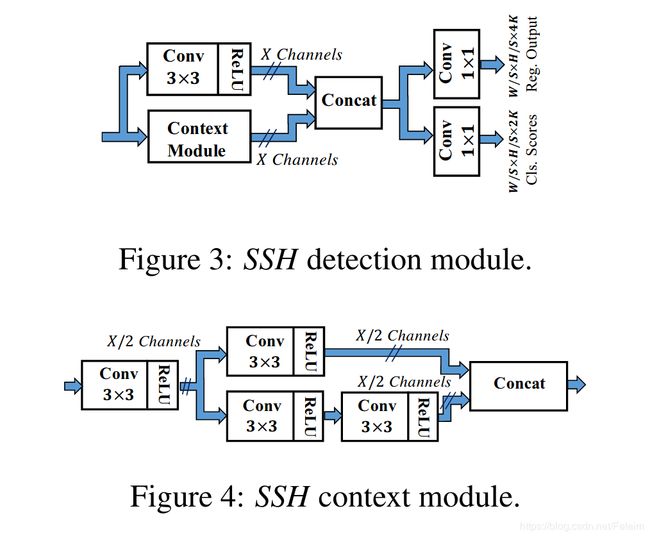
对应的代码实现, 非常的清晰,从图到对应的代码可以看到其实就是对经过FPN后的feature map经过不同程度的特征提取,最后将不同程度的特征再进行concat操作得到最后的feature map,原文中说主要是为了增加特征图有效的感受野,换句话说也就是为了获得更好的特征图,这个特征图的表征能力更强!
# SSH Detect Module
class DetectModule(nn.Module):
def __init__(self, in_channels):
super(DetectModule, self).__init__()
self.upconv = CBAModule(in_channels, in_channels // 2, 3, 1, padding=1)
self.context = ContextModule(in_channels)
def forward(self, x):
up = self.upconv(x)
down = self.context(x)
return torch.cat([up, down], dim=1)
# SSH Context Module
class ContextModule(nn.Module):
def __init__(self, in_channels):
super(ContextModule, self).__init__()
block_wide = in_channels // 4
self.inconv = CBAModule(in_channels, block_wide, 3, 1, padding=1)
self.upconv = CBAModule(block_wide, block_wide, 3, 1, padding=1)
self.downconv = CBAModule(block_wide, block_wide, 3, 1, padding=1)
self.downconv2 = CBAModule(block_wide, block_wide, 3, 1, padding=1)
def forward(self, x):
x = self.inconv(x)
up = self.upconv(x)
down = self.downconv(x)
down = self.downconv2(down)
return torch.cat([up, down], dim=1)
4. 任务输出
最后就是经常说的head部分了,在源代码中是有三个输出的,分别是人脸box中心点的高斯heat map, 第二个是回归出来的人脸框部分,最后就是人脸关键点landmark部分
self.center = HeadModule(wide, 1, has_ext=has_ext)
self.box = HeadModule(wide, 4, has_ext=has_ext)
if self.has_landmark:
self.landmark = HeadModule(wide, 10, has_ext=has_ext)
这里的HeadModule模块如下
class HeadModule(nn.Module):
def __init__(self, in_channels, out_channels, has_ext=False):
super(HeadModule, self).__init__()
self.head = nn.Conv2d(in_channels, out_channels, kernel_size=1)
self.has_ext = has_ext
if has_ext:
self.ext = CBAModule(in_channels, in_channels, kernel_size=3, padding=1, bias=False)
def init_normal(self, std, bias):
nn.init.normal_(self.head.weight, std=std)
nn.init.constant_(self.head.bias, bias)
def forward(self, x):
if self.has_ext:
x = self.ext(x)
return self.head(x)
换句话说headmodule就是针对对应的任务做个卷积,用最后的卷积来明确下任务类型,就像一个小孩已经学了很多知识了,下面三个任务相当于告诉小孩需要考语文,数学,英语这三门课,另外的CBA,可以理解成还需要老师再进行一次知识点归纳,再进行考试.
5. 初始化权重
之前有篇文章说使用预训练模型并不能够提升准确率,只是能够加速网络收敛,但是数据量如果不大,感觉还是应该加载与训练模型的
def init_weights(self):
# Set the initial probability to avoid overflow at the beginning
prob = 0.01
d = -np.log((1 - prob) / prob) # -2.19
# Load backbone weights from ImageNet
self.bb.load_pretrain()
self.center.init_normal(0.001, d)
self.box.init_normal(0.001, 0)
if self.has_landmark:
self.landmark.init_normal(0.001, 0)
def load(self, file):
checkpoint = torch.load(file, map_location="cpu")
for k, v in checkpoint.items():
print(k)
print("*****************************************")
self.load_state_dict(checkpoint)
4. 损失函数(3个)
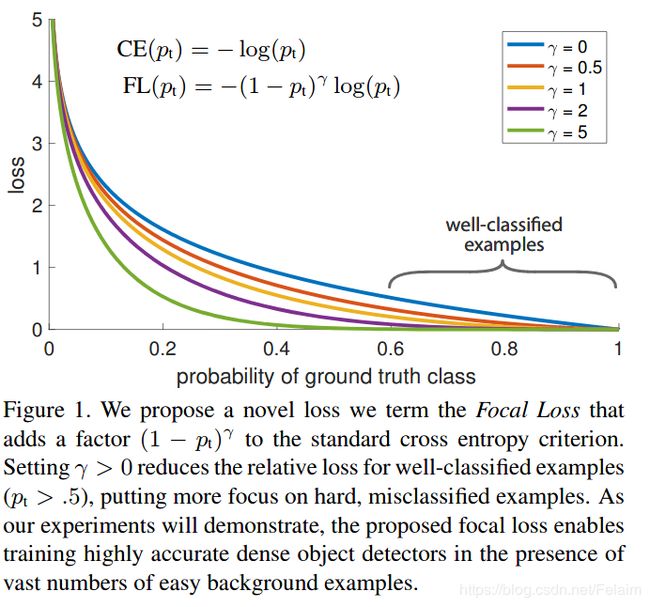
1. focal Loss
下图截自focal loss原论文
class FocalLoss(nn.Module):
def forward(self, pred, gt, pos_weights, keep_mask=None):
pos_inds = gt.eq(1).float()
neg_inds = gt.lt(1).float()
neg_weights = torch.pow(1 - gt, 4)
pos_loss = torch.log(pred) * torch.pow(1 - pred, 2) * pos_weights
neg_loss = torch.log(1 - pred) * torch.pow(pred, 2) * neg_weights * neg_inds
if keep_mask is not None:
pos_loss = (pos_loss * keep_mask).sum()
neg_loss = (neg_loss * keep_mask).sum()
else:
pos_loss = pos_loss.sum()
neg_loss = neg_loss.sum()
return -(pos_loss + neg_loss)
对于Focal loss 的解释已经有很多了,主要就是为了平衡目标检测中正负样本比例严重失衡的问题,使用mask是为了去除一些小人脸对loss的贡献
2. GIoU Loss
下图截自原始GIoU论文,可以发现在l2距离和l1距离一样的情况下,IoU和GIoU的差别很大.
 按照传统方式计算IoU的时候,如果两个框没有交集,那么IoU计算都为0,无法区分两个框之间的距离,于是作者就提出了GIoU这个概念,也可以度量两个框之间的距离大小,因为在GIoU涉及到两个框的包络,也就度量了两个框的距离.
按照传统方式计算IoU的时候,如果两个框没有交集,那么IoU计算都为0,无法区分两个框之间的距离,于是作者就提出了GIoU这个概念,也可以度量两个框之间的距离大小,因为在GIoU涉及到两个框的包络,也就度量了两个框的距离.
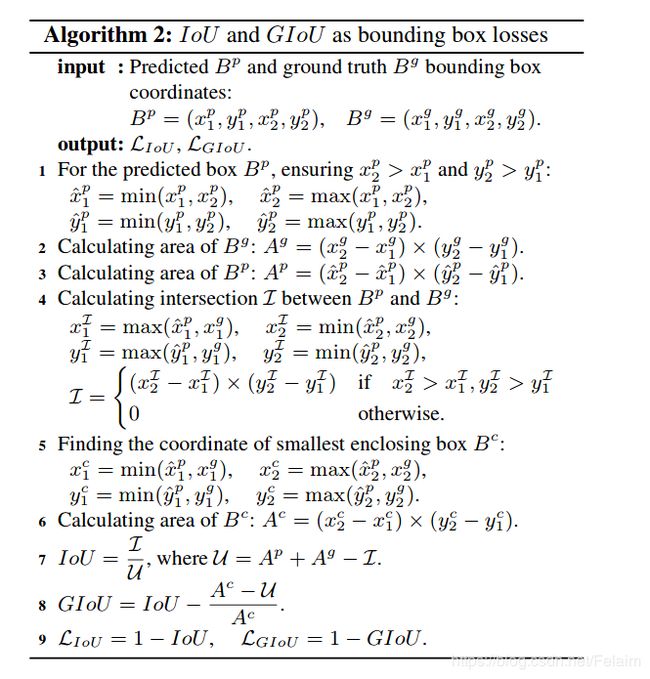 算法的实现:
算法的实现:
class GIoULoss(nn.Module):
def __init__(self):
super(GIoULoss, self).__init__()
self.shift = None
def forward(self, pred, gt, weight):
# pred is b, 4, h, w
# gt is b, 4, h, w
# mask is b, 1, h, w
# 4 channel is x, y, r, b - cx //这是个啥
h, w = pred.shape[2:]
weight = weight.view(-1, h, w)
mask = weight > 0
weight = weight[mask]
avg_factor = torch.sum(weight)
if avg_factor == 0:
print("avg is zero")
return torch.tensor(0.0)
if self.shift is None:
x = torch.arange(0, w, device=pred.device)
y = torch.arange(0, h, device=pred.device)
shift_y, shift_x = torch.meshgrid(y, x)
self.shift = torch.stack((shift_x, shift_y), dim=0).float() # 2, h, w
pred_boxes = torch.cat((
self.shift - pred[:, [0, 1]],
self.shift + pred[:, [2, 3]]
), dim=1).permute(0, 2, 3, 1) # b, 4, h, w to b, h, w, 4
# gt_boxes = torch.cat((
# self.shift + gt[:, [0, 1]],
# self.shift + gt[:, [2, 3]]
# ), dim=1).permute(0, 2, 3, 1) # b, 4, h, w to b, h, w, 4
gt_boxes = gt.permute(0, 2, 3, 1)
pred_boxes = pred_boxes[mask].view(-1, 4)
gt_boxes = gt_boxes[mask].view(-1, 4)
# max x, max y
lt = torch.max(pred_boxes[:, :2], gt_boxes[:, :2])
# min r, min b
rb = torch.min(pred_boxes[:, 2:], gt_boxes[:, 2:])
wh = (rb - lt + 1).clamp(0) # n, 2
enclose_lt = torch.min(pred_boxes[:, :2], gt_boxes[:, :2])
enclose_rb = torch.max(pred_boxes[:, 2:], gt_boxes[:, 2:])
enclose_wh = (enclose_rb - enclose_lt + 1).clamp(0) # n, 2
enclose_area = enclose_wh[:, 0] * enclose_wh[:, 1]
overlap = wh[:, 0] * wh[:, 1]
pred_area = (pred_boxes[:, 2] - pred_boxes[:, 0] + 1) * (pred_boxes[:, 3] - pred_boxes[:, 1] + 1)
gt_area = (gt_boxes[:, 2] - gt_boxes[:, 0] + 1) * (gt_boxes[:, 3] - gt_boxes[:, 1] + 1)
ious = overlap / (pred_area + gt_area - overlap)
u = pred_area + gt_area - overlap
gious = ious - (enclose_area - u) / enclose_area
iou_distance = 1 - gious
return torch.sum(iou_distance * weight) / avg_factor
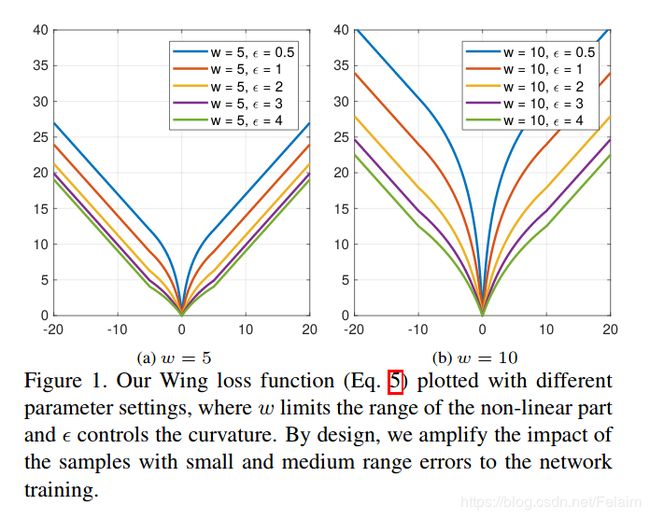
3. Wing Loss
公式和截图都来自原论文,主要也是对loss的一个改进,l1loss在算梯度是step不变,L2loss的异常值对loss的影响太大,smooth L1在loss比较小的时候step太小,于是有了Wing loss

class WingLoss(nn.Module):
def __init__(self, w=10, e=2):
super(WingLoss, self).__init__()
# https://arxiv.org/pdf/1711.06753v4.pdf Figure 5
self.w = w
self.e = e
self.C = self.w - self.w * np.log(1 + self.w / self.e)
def forward(self, x, t, weight, sigma=1):
diff = weight * (x - t)
abs_diff = diff.abs()
flag = (abs_diff.data < self.w).float()
y = flag * self.w * torch.log(1 + abs_diff / self.e) + (1 - flag) * (abs_diff - self.C)
return y.sum()
5. 数据处理
这个LZ准备再开一个博客,在详细写一下,主要涉及到对应gt的生成,数据增广,怎么使用自己的数据等一系列问题.
参考地址
1.mobilenet v3
2. SSH: Single Stage Headless Face Detector
3. Objects as Points
4. Focal Loss for Dense Object Detection
5. focal loss 分析 https://zhuanlan.zhihu.com/p/80692105
6. Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression
7. Wing Loss for Robust Facial Landmark Localisation with Convolutional NeuralNetworks