工业机器人abb现场总线DeviceNet网络配置
关于Devicenet总线
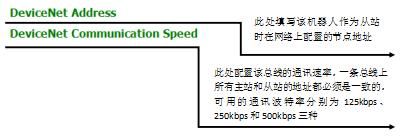
Devicenet网络作为工厂设备网,最大可以操作64个节点(即一个网络上允许从在64个从站),可用的通讯波特率分别为125kbps、250kbps和500kbps三种。设备可由DeviceNet总线供电或使用独立电源供电。一台支持DeviceNet网络的机器人对上可以作为下层设备的主站,对下可以作为PLC或其他可作为主站的设备的从站。
硬件连接
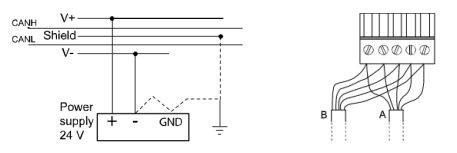
如图连接好总线电缆和总线电源线,并且在总线末端并联121Ω的电阻作为终端。
配置一个DeviceNet 网络上的信号的步骤
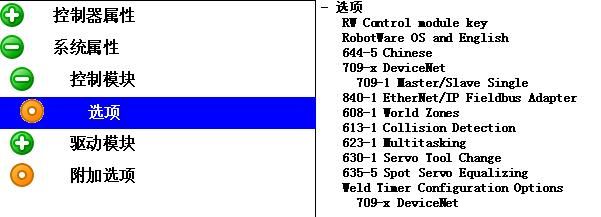
在机器人上要使用DeviceNet总线首先得确认该机器人预装了该选项,打开机器人的系统信息,在选项目录下查看是否安装有709-X选项(如图)。
配置完下面三项,才能配置板卡上的信号,分别为:Bus、Unit Type、Unit
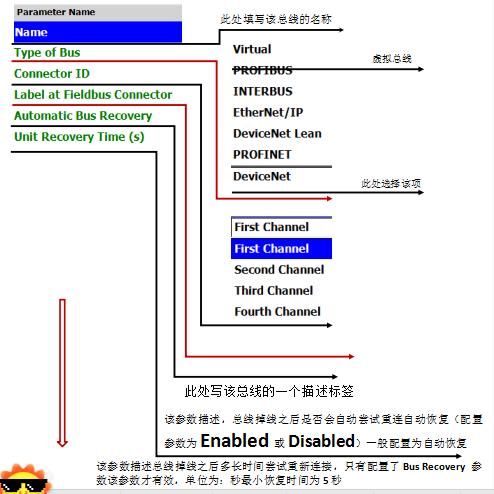
(1)配置一条总线(BUS)

增加了该选项的机器人一般出厂就已经配置了一个DeviceNet1,如果没有选择下方的
添加一条新的总线。具体各选项的配置和含义见下图描述:
(2)配置一个类型的单元(Unit Type)
对于机器人需要做从站的配置,系统已经标配了一个Unit Type——DN_SLAVE,直接在UNIT中配置时直接调用即可,需要修改的地方就是板卡的输入输出字节数(Output Size\Input size),输入输出最多可以配置64个字节(byte),即最多可以有512个位(bit)输入输出。
对于非标的(不是ABB标准的I/O板卡的统称)从站板卡,需要根据实际的硬件规格创建不同的Unit Type。由于创建非标的板卡类型需要设置正确的设备ID编号和序列号,如果不是确切的知道这些参数的话ABB提供了一个功能可以通过日志文件自动读取上图这些配置参数。

以上五项可以通过系统提供的DN_GENERIC选项从设备中读取出来。
直接跳过这一步,设置下面的一步在UNIT中设置正确的模块地址,然后重启就可以在机器人日志文件中得到这些参数的具体值。然后反过来对刚才需要的板卡类型更新正确的配置在UNIT中使用。
这一个类型中需要设置以下的参数:
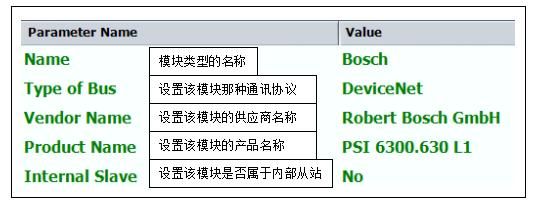
接下来这些参数,在前面已经介绍个如何获得正确的配置:
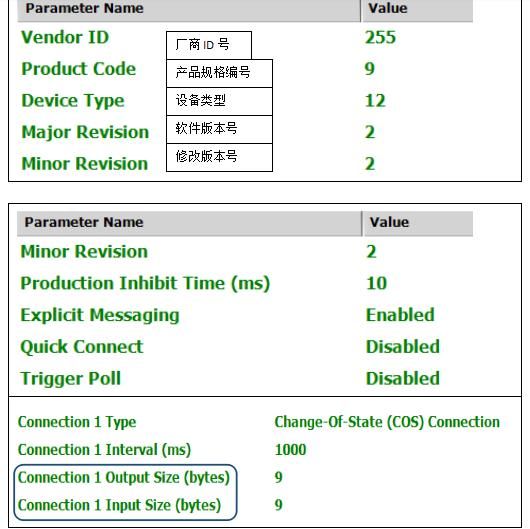
输入输出配置字节的大小也可以通过DN_GENERIC模块类型读出
(3)配置一块I/O板(UNIT)
配置一个UNIT需要配置下面这些参数:
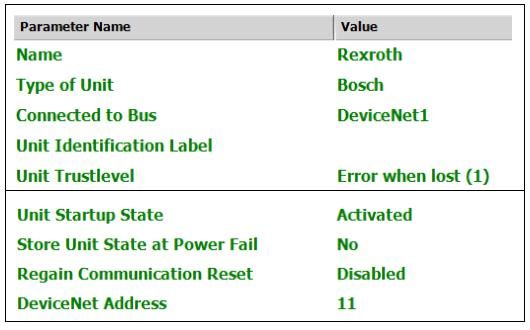
该配置的 Parameter Name从上到下依次为:
· 配置该模块的名称
· 配置板卡类型,在UNIT TYPE未正确配置是该处可选择非标模块DN_GENERIC,在完成正确配置后再更新
· 配置该模块挂载在那一条总线上
· 设置单元识别标签
· 信任级别,配置模块故障后系统的处理级别
· 设置单元是否开机激活
· 设置是否在系统重启后保持之前的激活/失活状态
· 设置单元在通讯恢复后是否将信号状态重置为默认值
· 配置该模块在总线上的地址
(4)在该I/O板上配置需要的信号
一共有6种信号类型:数字输入信号、数字输出信号、组输入信号、组输出信号、模拟量输入信号、模拟量输出信号
数字输入信号的配置界面:


Parameter Name 从上到下一次为:
· 设置信号名称
· 设置该信号属于那种信号类型
· 设置该信号在那一个UNIT上
· 信号标签
· 设置该信号在该单元上的地址
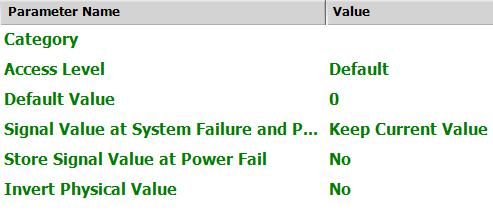
· 配置信号的分类
· 设置该信号的读写属性:默认(只在T1模式下可更改)、只读、所有模式
· 设置该信号的默认值,
· 设置该信号下降沿的检测过滤时间(默认为1000ms)
· 设置该信号上升沿的检测过滤时间(默认为1000ms)
· 设置该信号实际输入值是否经过取反处理
数字输出信号的配置界面:
该配置中除以下两项参数外,其余参考输入信号的配置方法:
· signal value at system failure and power fail 该参数配置机器人在系统故障和重启过程中的处理方式,有两个参数可选(输出为配置的默认值和保持当前值)
· store signal value at power fail 该参数配置该信号是否在系统重启后继续保持,选NO,则在重启后重置为配置的默认值。
(5)ABB DeviceNet转ProfiBus网关的配置
以DSQ352为例,该模块主要是把DeviceNet转为ProfiBus的一个网关,除了要配置作为DeviceNet从站的所有项目之外还需配置一项Fieldbus Command项,在该项中主要配置该模块作为ProfiBus从站的一些必要项目:输入、输出的大小(单位为字,Wold,16个位为一个Wold),站点地址。
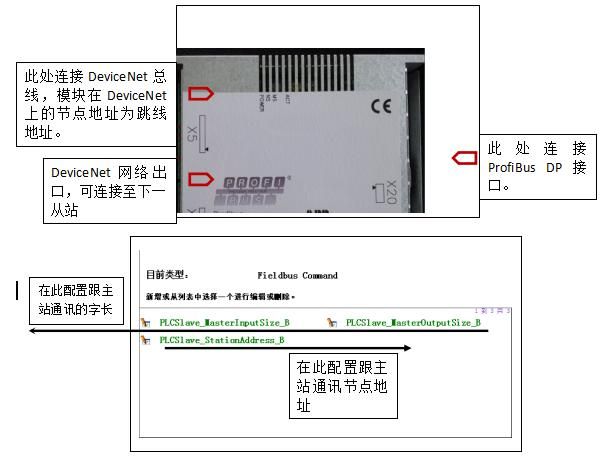
注:在UNIT TYPE中配置的模块输入输出大小单位为:字节,Byte,8个位为一个Byte。
常见故障的排除
1. 总线无电源:
检查总线24V电源是否连接正常
2. 模块无法联机:
检查模块配置的通讯地址是否跟机器人控制器中的配置一致,通讯速率是否一致
3. 通讯不稳定,频繁掉线:
a.检查通讯电缆屏蔽层接地是否正常可靠;
b.通讯电缆周围是否有强电电缆,建议分槽铺设;
c.检查通讯速率是否设置过高,如果现场干扰较多时可以尝试适当减小通讯速率;
d.检查网络末端是否具有终端电阻,没有则在网络末端并联121欧姆终端电阻。
本文来源:北京迪基透科技有限公司