Eigen库
参考:Eigen英文手册
Eigen的API手册写的真心详细,推荐阅读. Eigen中涉及的分解方法主要包括,Cholesky分解、QR分解、SVD分解、特征值分解(eigendecomposition)等.
1、线性求解问题中几种分解方法的比较
针对求解 A x = b Ax=b Ax=b 这种线性问题,Eigen提供了下面几种分解方法,每一种方法都提供了一个solve()函数以便求解得到 x x x,Eigen对每一种分解方法的速度和精度做了如下对比:
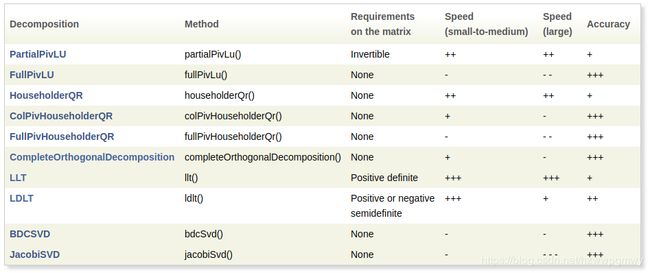
更完整的对比结果在这:https://eigen.tuxfamily.org/dox/group__TopicLinearAlgebraDecompositions.html
实际的速度对比数据在这(注意,测试时使用的矩阵是float类型,如果是double类型的,需要乘2),Cholesky分解需要使用正定的Hermite矩阵,所以在对计算超定矩阵耗时中加入了计算 A T A A^TA ATA 的耗时.
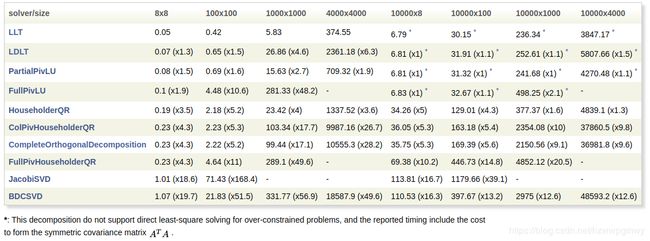
结论:
LLT是最快的求解器,但是精度也是最差的,并且只能对正定矩阵进行分解,而LDLT则可以应对正半定和负半定问题,精度较LLT更高,所以尽量使用LDLT,但是LDLT在求解大矩阵问题时,耗时较QR增加更多,所以究竟选择那种分解方式求解问题,需要根据速度和精度综合考量!
2、使用Eigen的分解方法之前需要注意的地方
2.1 检查解是否存在,带回原方程计算下误差
relative_error = (A*x - b).norm() / b.norm(); // norm() is L2 norm
2.2 计算特征值和特征向量
根据你的矩阵特性选择合适方法:https://eigen.tuxfamily.org/dox/group__TopicLinearAlgebraDecompositions.html
使用info()判断是否收敛(一般都会收敛的)
SelfAdjointEigenSolver<Matrix2f> eigensolver(A);
if (eigensolver.info() != Success) abort();
2.3 计算逆矩阵和行列
如果你的矩阵是小矩阵( 4 × 4 4 \times 4 4×4),逆矩阵和行列式随便算,如果是大矩阵就要注意了!
确定你是否真的需要逆矩阵,因为很多时候求逆矩阵都是为了求解 A x = b Ax=b Ax=b 问题,所以最好使用上面介绍的分解方法代替.
如果你计算行列式是为了确定该矩阵是否可逆,那么将很不划算(参照前面两篇博客的内容)
PartialPivLU和FullPivLU中提供了inverse() 和 determinant()的方法,以代替对矩阵直接调用上述方法.
2.4 最小二乘问题求解
最精确的方式是SVD分解,Eigen提供了两个类以实现SVD分解:BDCSVD(大矩阵)和JacobiSVD(小矩阵),推荐使用BDCSVD,因为当发现要分解的矩阵是小矩阵时,将自动切换到JacobiSVD.
2.5 将分解对象构造和分解计算分开
如下,如果将对象构造和分解计算分开的话,这样你就可以重复使用这个对象进行其它矩阵的分解,另外可以选择在构造时使用固定大小,这样可避免内存的动态分配(费时).
LLT<Matrix3f> dec(A); //同时进行
LLT<Matrix3f> dec2; //分开进行
dec2.compute(A);
HouseholderQR<MatrixXf> qr(50,50);
MatrixXf A = MatrixXf::Random(50,50);
qr.compute(A); // no dynamic memory allocation
2.6 Rank-revealing分解
分解的过程是否能够计算得到矩阵的秩,这种类型的分解能够很好的解决非满秩矩阵(奇异矩阵)问题
提供的函数包括rank()和isInvertible(),也提供了the kernel (null-space) and image (column-space) of the matrix
使用setThreshold()设置rank判定阈值,因为系统使用的阈值是depends on the decomposition but is typically the diagonal size times machine epsilon
Matrix2d A;
A << 2, 1,
2, 0.9999999999;
FullPivLU<Matrix2d> lu(A);
cout << "By default, the rank of A is found to be " << lu.rank() << endl;
lu.setThreshold(1e-5);
cout << "With threshold 1e-5, the rank of A is found to be " << lu.rank() << endl;
如果不设置阈值,得到的rank将会是2,如果设置为1e-5,将是1
2.7 矩阵的存储顺序选择
1)根据你所使用的算法选择,如果你的算法需要row by row,那么你的矩阵使用RowMajor将会更快!(因为二维矩阵都是展开成一维数据存储在内存里面的)
2)如果你所使用的其它库中也使用Eigen,而这些其它库规定了Eigen矩阵的存储顺序,那么你最好使用这些库中定义的矩阵的存储顺序,比如,g2o中g2o/core/eigen_types.h头文件就定义了它内部使用的矩阵的存储顺序.
3)Eigen默认使用的ColMajor,也就是说,很多Eigen中的很多算法使用的矩阵都是列优先的顺序,所以虽然Eigen同时支持ColMajor和RowMajor,但是ColMajor在Eigen中的效率是最好的,建议使用列优先!(都这样了,我还有得选吗~)
3、LLT和LDLT分解
LLT分解形式:
A = L L ∗ A = LL^* A=LL∗
Eigen中的LLT类定义如下
template<typename _MatrixType, int _UpLo> class LLT
{}
_UpLo:表示对矩阵进行LLT分解使用的是其下三角部分(Lower,默认值)还是上三角部分(Upper)
为了使LLT效率最大化,推荐使用column-major storage format with the Lower triangular part或者row-major storage format with the Upper triangular part
LDLT分解形式:
A = P T L D L ∗ P A = P ^ { T } L D L ^ { * } P A=PTLDL∗P
因为LDLT分解中不会用到平方根操作,所以结果更稳定更快,所以如果没有特殊的需要(需要),尽量使用LDLT替代LLT.
并且因为Cholesky不是rank-revealing的,所以不要使用Cholesky分解确定是否有解.
LLT分解时默认只使用的 A A A 中的下三角部分,并不会检查 A A A 矩阵的对称性,所以如果你输入的 A A A 矩阵不是正定的Hermite矩阵 ,你也会得到分解结果,只不过这个结果错误的而已,所以务必确定你要分解的矩阵是对称的.
未完待续…