【OpenCV】基于SIFT/SURF算法的双目视差测距(二)
文章目录
- 原理回顾
- 计算K值
- 多项式拟合
- 测距实验
- 实验代码
- 棋盘角点视差获取
- 实验数据处理(MATLAB)
- 视差测距试验
上一篇链接: https://blog.csdn.net/qinchang1/article/details/86934636
上篇主要介绍了:
1.本次双目视差测距的 原理;
2.如何基于SIFT和SURF算法获得 视差估计。
原理回顾
双目摄像头成像满足这个反比例关系。

其中,
1.?(mm)为摄像头投影中心到物体的距离;
2.?(像素)为视差,与?1−?2 成比例关系;
3.?(mm*像素)为常数。
实验步骤:根据这个关系,用已知距离Z和其视差D,计算出摄像头的K值,再使用这个K值去反推之后的测距结果。
计算K值
如前所述,K值是一个常数,是双目摄像头固有的属性,现在以已知目标的距离Z和视差D来计算双目摄像头的固有属性。
已知目标我选取的是识别精度较高的棋盘角点。
棋盘角点数是5*7=35个,使用双目摄像头拍摄了距离从150-1000mm,每隔50mm距离的18张棋盘左右图像。
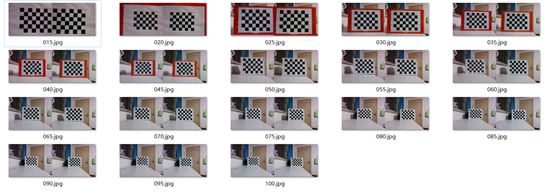
由于距离跨度较大,统一尺寸的棋盘可能会在近的地方显示不全,远的地方显示模糊,因此准备了大中小三个尺寸的棋盘。
35个棋盘角点左右图像视差均值作为该距离下的棋盘视差D。
每个角点视差值和视差均值输出如下图:


你会很明显地发现,从850mm距离开始,视差值甚至出现了负值。
这是由于在距离较远处的视差值太小导致的,这时候视差值也许小于本身摄像头拍摄的误差,本应该是左图像X坐标大于右图像的,由于两个值太接近,去掉各自的误差后可能会出现右图像X坐标比左图像还大的情况。
从这我们也可以发现双目视差测距的一个明显的缺陷:距离较远的地方很难测量, 若非要测量较远的地方,必须:
1.增加两摄像头的间距;
2.换精度更高的摄像头。
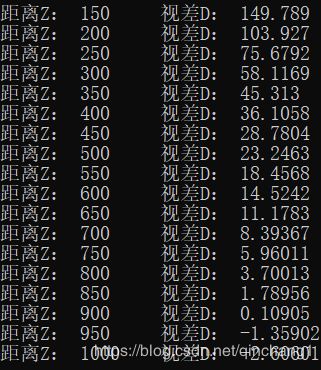
由于距离较远的地方视差值相对误差较大,因此数据分析时去掉800mm以后的数据。
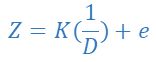
考虑到Z理论值是摄像头成像中心到物体的距离,而实际测量距离未必准确,因此增加误差距离e。
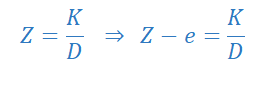
将其转换为求解Z为因变量,1/D为自变量的一次函数,对其进行线性回归。
之后用MATLAB处理实验数据:
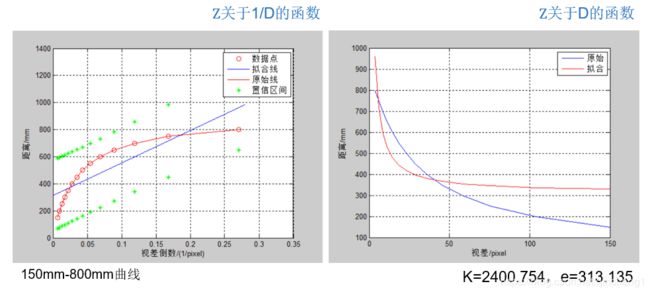
这个结果比较令我意外,理论上应该满足视差和距离成反比例关系,但是实际结果和理论却有很大的出入。
考虑到距离较远的地方视差相对误差较大,因此我去掉了600mm以后的部分:

这样稍微好了一些,但是说实话,我觉得这个结果和理想结果相差较大,但我不能想通其原因,考虑到可能是实验前没有进行双目摄像头标定,其他原因暂时也没能想到,欢迎补充。
但是从图中右半部分距离Z和视差D的曲线来看,确实有那么一点接近反比例函数曲线的意思。
多项式拟合
受实验条件的限制,我只能根据这个结果,通过多项式拟合的方式来获得距离Z和视差D的曲线关系。
首先用二次多项式拟合,但是效果不是特别好,偏差也比较大,因此考虑用三次多项式继续拟合,效果勉勉强强。
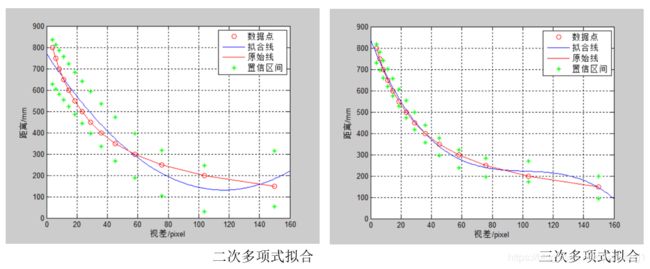
最后甚至试了四次多项式和五次多项式拟合,其实多余的也就是拟合了距离较近(也就是视差较大)的部分,这部分本身由于距离太近,很小的距离变化就会造成很大的视差变化,因此实际测量的结果会有很大的偏差,参考价值不大,因此去掉200mm以内的数据。

测距实验
最后我决定使用三次多项式拟合的结果进行视差测距。
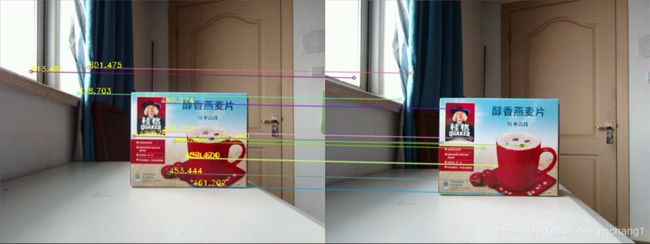
实验中测量麦片盒子距摄像头的距离,匹配特征点旁显示该特征点的距离,单位mm。
在实验中,我通过调整SURF或SIFT算法的参数,使得特征点基本上集中在目标物体上。
300mm的效果:

400mm的效果:

500mm的效果:

600mm的效果:
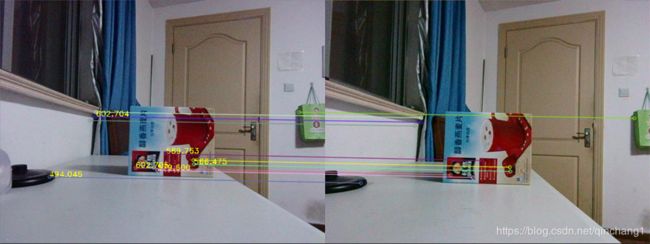
700mm的效果:
下面有两张白天拍摄的图像:
350mm:
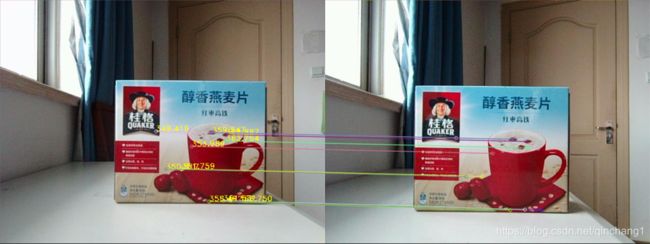
450mm:
从结果上看,基本上大多数识别点误差都能保持在10mm(1cm)以内。
实验代码
棋盘角点视差获取
#include 实验数据处理(MATLAB)
clear
x0=[];%D(Parallax)
x=[];%1/D(Parallax reciprocal)
y=[];%Z(Distance)
[P,S]=polyfit(x,y,1);%Linear or multiple function function fitting
[Y,delta]=polyconf(P,x,S);
x1=0:0.001:0.08;
f=polyval(P,x1);
figure(1);
plot(x,y,'ro',x1,f,'-')
ylabel('距离/mm');
xlabel('视差倒数/(1/pixel)');
hold on;
grid on
plot(x,y,'r');
plot(x,Y+delta,'*g');
plot(x,Y-delta,'*g');%confidence interval
legend('数据点','拟合线','原始线','置信区间');
y0=P(1)*x+P(2);
figure(2);
plot(x0,y);
ylabel('距离/mm');
xlabel('视差/pixel');
hold on;
grid on
plot(x0,y0,'r');
legend('原始','拟合');
视差测距试验
#include 如有错误,欢迎指正!