16281035-操作系统实验2
操作系统第二次实验:进程控制
16281035
我的github网址,里面有源文件,请查看
实验目的
- 加深对进程概念的理解,明确进程和程序的区别。
- 掌握Linux系统中的进程创建,管理和删除等操作。
- 熟悉使用Linux下的命令和工具,如man, find, grep, whereis, ps, pgrep, kill, ptree, top, vim, gcc,gdb, 管道|等。
基础知识
- 进程的创建
Linux中,载入内存并执行程序映像的操作与创建一个新进程的操作是分离的。将程序映像载入内存,并开始运行它,这个过程称为运行一个新的程序,相应的系统调用称为exec系统调用。而创建一个新的进程的系统调用是fork系统调用。
- exec系统调用
#include
int execl (const char *path, const char *arg,…);
execl()将path所指路径的映像载入内存,arg是它的第一个参数。参数可变长。参数列表必须以NULL结尾。
通常execl()不会返回。成功的调用会以跳到新的程序入口点作为结束。发生错误时,execl()返回-1,并设置errno值。
例 编辑/home/kidd/hooks.txt:
int ret;
ret = execl (”/bin/vi”, ”vi”,”/home/kidd/hooks.txt”, NULL);
if (ret == -1)
perror (”execl”);
- fork****系统调用
#include
#include
pid_t fork (void);
成功调用fork()会创建一个新的进程,它与调用fork()的进程大致相同。发生错误时,fork()返回-1,并设置errno值。
例:
pid_t pid;
pid = fork ();
if (pid > 0)
printf (”I am the parent of pid=%d!\n”, pid);
else if (!pid)
printf (”I am the baby!\n”);
else if (pid == -1)
perror (”fork”);
- 终止进程
exit()系统调用:
#include
void exit (int status);
- 进程挂起
pause() 系统调用:
int pause( void );
函数pause会把进程挂起,直到接收到信号。在信号接收后,进程会从pause函数中退出,继续运行。
- wait(等待子进程中断或结束)
#include
#include
pid_t wait (int * status);
wait()会暂时停止目前进程的执行,直到有信号来到或子进程结束。
如果在调用 wait()时子进程已经结束,则wait()会立即返回子进程结束状态值。
子进程的结束状态值会由参数status返回,而子进程的进程识别码也会一起返回。
如果不在意结束状态值,则参数status可以设成 NULL。
VIM常用命令速查

实验题目
1. 打开一个vi进程。通过ps命令以及选择合适的参数,只显示名字为vi的进程。寻找vi进程的父进程,直到init进程为止。记录过程中所有进程的ID和父进程ID。将得到的进程树和由pstree命令的得到的进程树进行比较。
-
首先我先自己创建一个名为VI的vim文件,之后用vim打开

-
打开界面如下:
我在其中启用了编辑命令,编辑了以下内容:
-
保存
-
查看vim进程号,5065

-
寻找vim进程的父进程,直到init进程为止。记录过程中所有进程的ID和父进程ID



init进程的pid是1.init进程是其他所有进程的父进程.
列出父进程号是1的进程,就是列出除了init外的所有进程.
所以寻找vim的父进程如下:
5065 -> 4626 -> 4619 -> 908 -> 1
-
将得到的进程树和由pstree命令的得到的进程树进行比较。
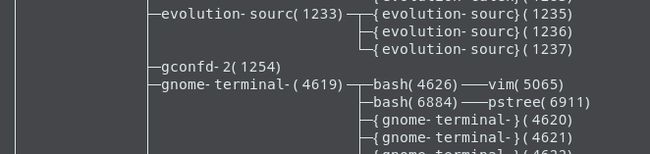


两个相比较,是一样的结果: 5065 -> 4626 -> 4619 -> 908 -> 1
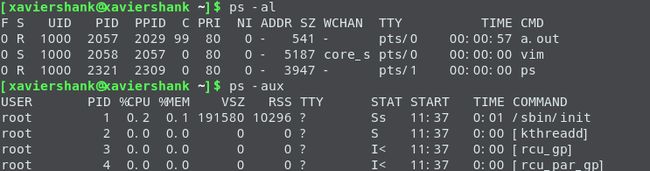
2、编写程序,首先使用fork系统调用,创建子进程。在父进程中继续执行空循环操作;在子进程中调用exec打开vi编辑器。然后在另外一个终端中,通过ps –Al命令、ps aux或者top等命令,查看vi进程及其父进程的运行状态,理解每个参数所表达的意义。选择合适的命令参数,对所有进程按照CPU占用率排序。
-
程序代码 fork.c
#include#include #include #include int main(int argc, char *argv[]){ pid_t pid = fork(); //在子进程 if(pid == 0) { int num = execl("/usr/bin/vim","vim","NULL"); if(num == -1) perror("execl"); } else if(pid>0) { //在父进程 while(1){} } else { printf("fork调用失败"); } return (0); } -
运行结果:打开了vim


-
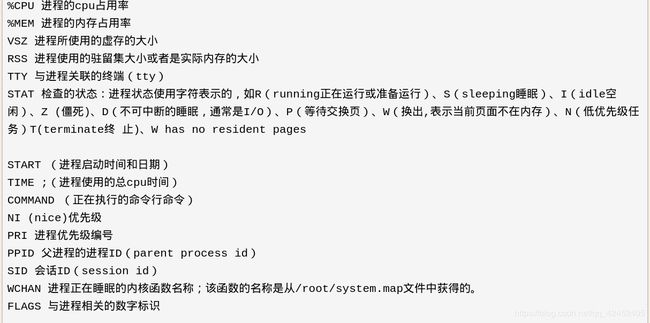
查看vi进程及父进程的运行状态以及各个参数的意思:
-
选择合适的命令参数,对所有进程按照CPU占用率排序


3、使用fork系统调用,创建如下进程树,并使每个进程输出自己的ID和父进程的ID。观察进程的执行顺序和运行状态的变化。

- 首先对fork()函数调用进行简单的测试

运行结果

输出两个hello
所以:函数通过系统调用创建一个与原来进程几乎完全相同的进程,这个新产生的进程称为子进程。一个进程调用fork()函数后,系统先给新的进程分配资源,例如存储数据和代码的空间。然后把原来的进程的所有值都复制到新的新进程中,只有少数值与原来的进程的值不同。相当于克隆了一个自己。需要注意的一点:就是调用fork函数之后,一定是两个进程同时执行的代码段是fork函数之后的代码,而之前的代码以及由父进程执行完毕。
fork()返回值意义如下:
=0:在子进程中
0:在父进程中
<0:创建失败
-
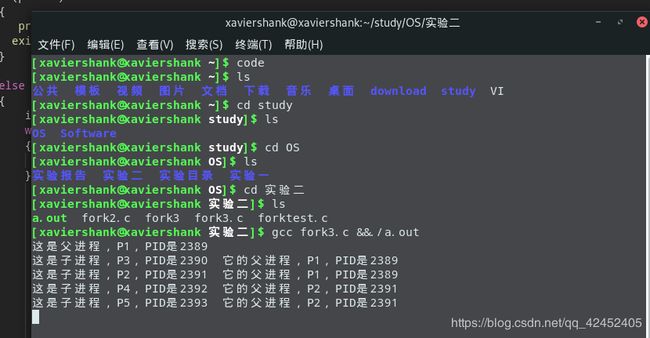
源代码 fork3.c
#include#include #include #include #include #include #include //这个头文件不能少,否则pid_t没有定义 int main(int argc, char *argv[]) { pid_t pidA,pidB,pidC,pidD; printf("这是父进程,P1,PID是%d\n",getpid()); pidA = fork(); //创建新进程 if(pidA<0) { printf("新进程创建失败\n"); return 0; } else if(pidA == 0) { printf("这是子进程,P3,PID是%d\n",getpid()); return 0; } else { pidB = fork(); if(pidB<0) { printf("新进程创建失败\n"); return 0; } else if(pidB == 0) { printf("我是子进程,P2,PID是%d\n",getpid()); pidC = fork(); if(pidC == 0) { printf("这是子进程,P4,PID是%d\n",getpid()); return 0;//防止产生孙进程 } pidD = fork(); if(pidD == 0) { printf("这是子进程,P5,PID是%d\n",getpid()); return 0;//防止产生孙进程 } } } return 0; } -
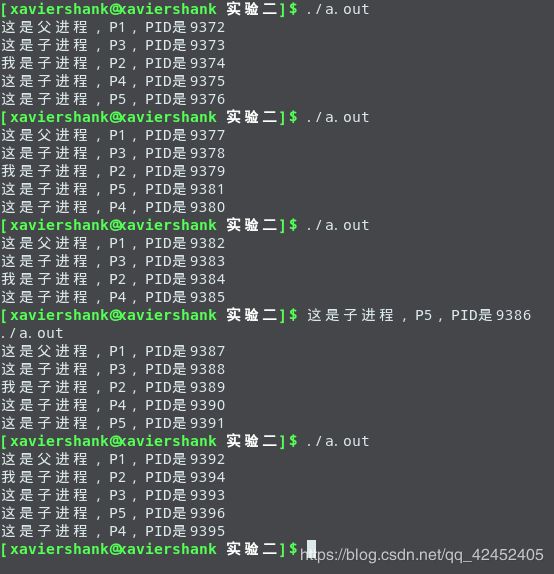
运行结果
-
代码改进:我发现代码如上述,不论是父进程还是子进程都仍旧在执行,不会停止。
所以我在原来的基础上加入了如下的代码:
int *status; waitpid(pidC,status, 0); waitpid(pidD,status, 0); return 0; } } int *status; waitpid(pidB,status, 0); waitpid(pidA,status, 0); return 0;得到的运行结果自动停止
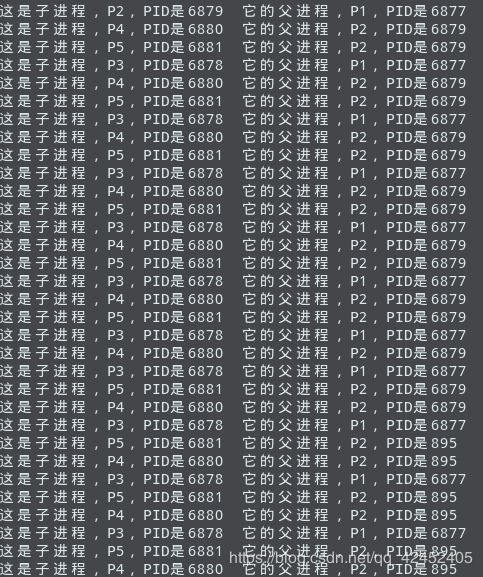
4、修改上述进程树中的进程,使得所有进程都循环输出自己的ID和父进程的ID。然后终止p2进程(分别采用kill -9 、自己正常退出exit()、段错误退出),观察p1、p3、p4、p5进程的运行状态和其他相关参数有何改变。
-
kill -9
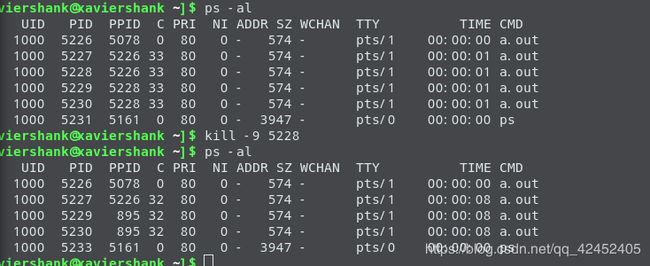
在杀掉进程P2,进程号为5228之后,P4和P5的PPID不再是5228,而变成了895.
我在进程树中查询,发现systemd(895), 也就是相当于最原始的一个根进程。那么我就有很多的问题:
(1)为什么这些失去父进程的“孤儿”子进程的PPID不是systemd(1)?
(2)systemd(1)和systemd(895)之间的关联是什么?
-
自己正常退出
源代码
#include#include #include #include #include #include #include //这个头文件不能少,否则pid_t没有定义 int main(int argc, char *argv[]) { pid_t pidA,pidB,pidC,pidD; int i; printf("这是父进程,P1,PID是%d\n",getpid()); pidA = fork(); //创建新进程 if(pidA<0) { printf("新进程创建失败\n"); exit(0); } else if(pidA == 0) { i=100; while(i-->0) { printf("这是子进程,P3,PID是%d 它的父进程,P1,PID是%d\n",getpid(),getppid()); } return 0; } else { pidB = fork(); if(pidB<0) { printf("新进程创建失败\n"); return 0; } else if(pidB == 0) { i=100; pidC = fork(); if(pidC == 0) { i=100; while(i-->0){ printf("这是子进程,P4,PID是%d 它的父进程,P2,PID是%d\n",getpid(),getppid());} return 0;//防止产生孙进程 } pidD = fork(); if(pidD == 0) { i=100; while(i-->0){ printf("这是子进程,P5,PID是%d 它的父进程,P2,PID是%d\n",getpid(),getppid()); } return 0;//防止产生孙进程 } i=100; while(i-->0) { printf("这是子进程,P2,PID是%d 它的父进程,P1,PID是%d\n",getpid(),getppid()); if(i==50) { exit(0); } } int *status; waitpid(pidC,status, 0); waitpid(pidD,status, 0); return 0; } } int *status; waitpid(pidB,status, 0); waitpid(pidA,status, 0); return 0; } 运行结果:
和第1问结果一样,只不过它运行过快,未自动结束前的部分没来得及截图。
3. 段错误退出
源代码
#include 运行结果:


段错误退出从以上结果来看不会影响P2?它仍旧是P4和P5的父进程。