每年以 2 - 3 件仿生机器人生产速度不停扩张仿生产品线的 Festo ,是一家德国自动化技术供应商,近年来以外观精巧夺目的仿生机器人频频登上科技新闻热搜榜。近日,由其发布的一款最新仿生产品——气动机械臂,更是引入了强化学习及大规模并行学习等 AI 技术,使得仿生机器人的技能习得与技能同步变得更加便捷。

机械臂对于一组仿人机器协作组合的重要性不言而喻,作为机器人的末端执行器( End-Effector ),我们需要它在日常生活中替代人类双手去完成抓握、转动、触摸、按压等任务。然而目前的机械臂依然面临灵巧性欠缺、抓重比失衡、传感器覆盖率低、环境顺从性低、高度集成性等难点,无法在实际中实现量产,也是各家机器人企业所卯足精力所要克服的技术难点。
而 Festo 的这款 BionicSoftHand 则为我们提供了一条新思路。
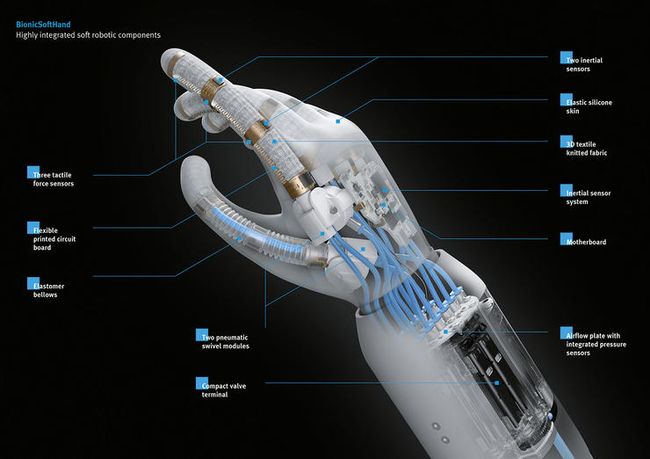
在硬件方面,BionicSoftHand 利用气动学,以气动波纹管结构代替人体骨头进行动作操控,当气室充满空气时,手指呈弯曲状态;当气室被排空时,手指则呈伸展状态。此外,BionicSoftHand 在拇指与食指处配有旋转模块,可以让手指横向移动,由此实现了多达 12 个自由度。
值得一提的是,这些气动波纹管结构被封装在具有弹性和高强度纤维的 3D 织物中,这也意味着,织物可以精确地定位并决定结构应该在哪些点上膨胀,从而产生力,并防止其过度膨胀。此外开发人员还特别设计了一个小型数字控制阀岛安装在机械臂下方, 因而控制气动波纹管结构的气管无需贯穿整个机械臂,可以快速、轻松地进行连接与使用。

至于软件方面,AI 毫无疑问是其主打亮点。
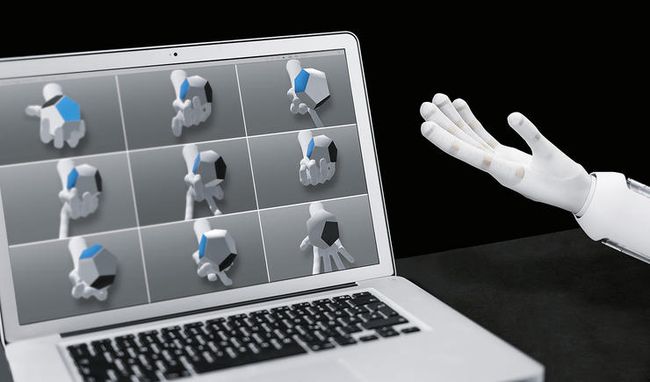
首先是强化学习方法的运用,这意味着 BionicSoftHand 不仅仅是机械地模仿动作,通过给出一个具体目标,它会自己反复进行试验来达成目标。过程中,机械臂将根据反馈逐渐优化动作,直至成功解决任务。
此外,借助深度感应摄像机数据以及人工智能算法,BionicSoftHand 会在虚拟环境中创建出一个“数字双胞胎”,使我们可以在虚拟环境中对其进行运动策略的相关训练,相比线下,将有效加快模型的训练速度。
而所谓大规模并行学习技术的引入,更是让这些在模拟环境里习得的技能可以第一时间同步所有的虚拟机械臂,进而转移至实际中的机械臂中进行使用。
这也意味着,所有失误都只会出现一次,便会立刻被修复并同步至所有模型;而新技能只要被习得,就能无限复制至全球范围的机械臂。
为了更客观对 BionicSoftHand 进行评价,雷锋网 AI 科技评论为此专门采访了意大利技术研究院(Italian Institute of Technology)仿人机电研究中心(Humanoid & Human Centered Mechatronics)的博士后研究员任赜宇。
气动原理在灵巧机械手的设计上不存在明显优势
任赜宇在受访时坦言,BionicSoftHand 单从最终所展示的 Demo 来看,并未让他感到眼前一亮,因为该 Demo 的核心主要是关于在运动控制上如何应用强化学习的方法,使高自由度的机械手能够轻易地进行复杂的手部操作(In-hand manipulation),但如果与 OpenAI 去年使用 Shadow Hand 还原魔方的 Demo 比较的话(视频链接:https://www.youtube.com/watch?v=sbfMo8u3LKw),他认为还是有一定差距的。
在机械手本体的硬件设计上,对于气动类原理驱动的机械手,任赜宇表示这在机械手设计领域中属于较为小众的方案,优势不太明显,且定位比较尴尬——能量密度比不上液压方案,系统集成的简洁紧凑程度比不上电机方案。
不过对于 BionicSoftHand 的气动波纹管结构,他则表示赞赏,他认为这是一款新颖、基于气动原理的传动方案,简洁紧凑且合理,从 demo 看来实现的效果很好。从本质上来说,它是利用软体材料的形变特性,气体作为相应的动力传递介质。
至于 BionicSoftHand 成功实现的12 个自由度,他则表示得综合看待。
从生物解剖学的相关文献来看,人类的手是具有21个自由度(不包括手腕)的极高自由度密度的器官。Festo 这款机械手每根手指的曲折方向共有2个自由度,食指和拇指的侧向摆动又各有1个自由度,加起来一共是5*2+2=12个自由度。
赜宇个人认为 12 个自由度是比较合适的自由度分布,既保证了操作功能上的灵巧性,又不至于使系统集成与控制由于高自由度而变得冗杂,导致实现成本较高。不过他强调,单单论自由度的数目,德国宇航局(DLR)曾经靠 42 个电机实现了 21 个自由度。所以我们要关注的,是为了实现这12个自由度,Festo 使用的 24 个相应的比例气缸,对应占用了多大的空间和质量,从最后展示的紧凑机电系统来看,赜宇认为是良好且合格的设计与实现。
总的来说,由于 Festo 有大量的仿生学研究基础,所以他所做的机器人本体结构设计是非常符合仿生学原理的。相较其他机器人研发单位,仿生机器人结构设计是 Festo 一个显著的技术优势。
人工智能在机器人领域的运用
对于 BionicSoftHand 主打的“共享式”人工智能,任赜宇表示很认可,毕竟未来的机器人世界肯定讲究多机器人协作,这种上层训练的轨迹规划、电机拖动以及相应的更高认知层面的算法,如果能够做到“一台大脑云共享”,是能够极大提高生产效率的。
不过被问到相比传统的控制算法,强化学习技术在机器人领域的运用还存在哪些难点,任赜宇从他的科研背景与角度也给出了自己的思考,他觉得在目前硬件上的落地还存在一些局限性:
训练周期长
可供采集的样本少
复杂机电系统带来的corner case
如何设置reward
仿真模型和实际模型差距较大
至于人工智能要想在机器人领域全面铺开,他表示整体在如下两点上还面临极大的挑战:
算法层面,面向更为灵活、更高维度、甚至涉及道德伦理的应用场景,现阶段的算法其实是“不智能”的。我们本质上还没有研究透人类大脑发展和进化的模式,现在的训练在数据量大、较为机械的应用场景取得了很好的效果,但这目前还是不够的。
硬件平台层面,我们生活的世界目前还是物质的,人工智能的全面落地还是需要一个物理世界的实际载体的。但相较于现在蓬勃发展的上层应用(AI)而言,物理平台的各方面能力实际上是有所欠缺的,属于木桶效应中的短板。
任赜宇最后强调,他主要是按照对比波士顿动力(Boston Dynamics Institute)的要求去评判的, 相对来说是非常苛刻的。如果放眼全球以一个平均水准来看,BionicSoftHand 实际上已经是相当好的工作了。他举了一个例子,BionicSoftHand 的手指上集成了非常紧凑的IMU 和tactile sensor,这样的尺寸从工程技术实现角度而言是十分不容易的了。
Festo 仿生家族的其他成员
Festo是一家历史悠久的家族企业,由德国人Gottlieb Stoll一手创立,成立于1925年,是当今世界上著名的气动元件、组件和系统的生产厂商。从2006年开始,Festo就与几家大学、研究所及开发公司一起合作创立了Bionic(仿生)学习网络,这些仿生机器人就是出自这个项目。一起来看看这个项目曾经诞生过哪些明星产品吧!

仿生蝙蝠机器人 — BionicFlyingFox
狐蝠机器人的运动由多个不同型号的电机控制,并采用机械耦合的形式结合在一起。较大的无刷直流电机可以控制机器人翅膀的拍打动作,小型电机们分别调节翅膀的每个关节,来达到控制飞行高度与方向的目的。其运用了模仿飞行哺乳动物翅膀特性的膜制作BionicFlyingFox的翅膀,这种弹性纤维材料(超级氨纶纤维),不会折皱或者撕裂,由两层密封薄膜和一块针织弹性纤维织物组成。织物本身具有弹性,表面是蜂窝结构,有大约45000个节点,这样无论蝙蝠有多大动作都不用担心变形,且稳定的几何结构使面料受到轻微损伤时,裂缝也不会变大能保持继续飞行。
仿生蜘蛛机器人 — BionicWheelBot
BionicWheelBot 是一款独具特色的行走机器人,以摩洛哥后翻蜘蛛为灵感,能够模仿摩洛哥后翻蜘蛛以翻滚模式在复杂地形上移动。其由15个小型电机控制着各个膝关节和身体。还有14个自动锁定涡轮确保机器人在移动某些腿部时,身体保持静止和直立。由于集成惯性传感器,它能知道自己滚到什么位置时可以再次伸出相应的腿向前摆渡。而且它在滚动时比走路时快得多,甚至可以克服高达5%的上坡倾斜。当机器人从行走模式向翻滚模式转变,BionicWheelBot 会将身体左右两侧的三条支脚转变为 " 车轮 "。而两条在行走模式下折收起来的支脚现在重新获得释放,并在地面上推动变为球形的蜘蛛开始运动,同时在翻滚过程中提供冲力。
仿生海扁虫机器人 — BionicFinWave
以两片柔软的矽胶(Silicone)代替乌贼肉鳍,透过左右各9个支点协助进行波浪状拍动,厉害的是,这复杂的结构仅由2颗伺服马达驱动,并由另一颗马达负责身体弯曲,控制机器人往上、下方游动。以这种方式,它们可以产生不同的波形,特别适合于慢速和精确运动,并且相比传统的螺旋传动器所搅拌的水量更少,更加节能。而且由于材料柔软,使它能够在狭小的管道内也能畅游无阻。为了使曲轴具有相应的柔性和灵活性,每个杆段之间都设有万向接头。为此,包括接头和曲柄连杆在内的曲轴以塑料打造而成,采用一体成型3D打印工艺。
仿生袋鼠机器人 — BionicKangaroo
机器人为气动系统所控制,在触地爪部内层的压缩空气推力作用下,实现向上向前地跳跃动作。这款机器人每完成一次跳跃动作,其爪部便会储存空气能量以继续下一次的跳跃动作。袋鼠重7公斤高1米,之所以能跳,是因为它装配了一个弹簧和气动缸。在跳跃能力上,可以说是非常厉害了——水平跳跃可达0.4米,垂直跳跃则达到了0.8米,更重要的是,它还能完成连续跳跃。沈阳治疗性病医院yiyuan.120ask.com/syxb/
仿生蚂蚁机器人 — BionicANTs
每只蚂蚁约巴掌大小,环绕身体的条纹是3D打印上去的电路。其胸部内置了一个光电鼠标传感器以便位置追踪。而蚂蚁的眼睛是一部摄像头的两部分, 根据摄像头提供的空间信息,蚂蚁移动位置、锁定并抓任务目标。 他们彼此之间通过无线进行交流,而地板上的传感器则能帮助他们「体察」周围环境。值得一提的是,蚂蚁肢体由六个压电陶瓷驱动器(actuator )组成,能够实现快速、精确地弯曲,并保持步伐紧凑,非常地节能。需要强调的是,当前将压电陶瓷驱动器应用到如此微小机器人的很罕见。
仿生企鹅机器人 — AquaPenguin + AirPenguin
它内置了自主判定系统,可根据水流自行导航定位,另外还设计了3D声纳系统,可以靠声波感知其它企鹅,防止撞到一块。一旦机器人放飞自我,又将化身为天空翱翔的 AirPenguin,由一个形似飞艇的气囊和鳍状肢组成,两边的脚蹼可以提供向前的推力,尾鳍和鼻尖处均可自由活动。此外,该机器人还配备了复杂的导航和通信设施,允许他们自主或根据固定规则进行自主探索。
仿生蝴蝶机器人 — eMotionButterfly
eMotionButterfly配有高度集成的电子面板,使它们能够各自地,且精确地激活翅膀,从而实现快速运动。为了保证飞行过程的可靠稳定,持续的通讯是必不可少的,eMotionButterfly面板上无线电和传感器技术以及引导和监测系统的结合实现了单个飞行体的定位。一旦机器人离开设定路径,计算机会立即对其纠正。 为此,摄像跟踪系统每秒会对机器人的精确实际位置进行160次测量,重新调整每个偏差。 因此飞行路径的规划是不断更新的,此外计算机还能及时检测到潜在的碰撞风险,以设定出适当的回避策略。