SLAM14讲ch9前端设计(二)
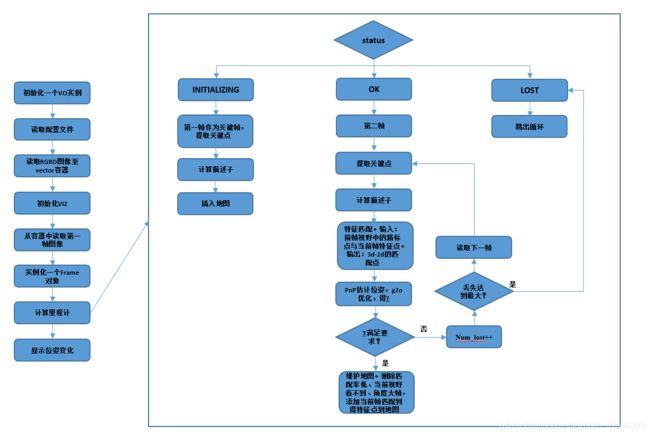
首先是整个VO的流程图
七、g2o类
g2o_types.h
g2o库中没有提供3D-3D的边,这里,我们需要自定义
#ifndef MYSLAM_G2O_TYPES_H
#define MYSLAM_G2O_TYPES_H
#include "myslam/common_include.h"
#include "camera.h"
#include
#include
#include
#include
#include
#include
#include
#include
namespace myslam
{
//3D-3D
//同时优化位姿和空间点
class EdgeProjectXYZRGBD : public g2o::BaseBinaryEdge<3, Eigen::Vector3d, g2o::VertexSBAPointXYZ, g2o::VertexSE3Expmap>
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW;
virtual void computeError();
virtual void linearizeOplus();
virtual bool read( std::istream& in ){}
virtual bool write( std::ostream& out) const {}
};
//3D-3D
// 只优化位姿,不优化空间点
class EdgeProjectXYZRGBDPoseOnly: public g2o::BaseUnaryEdge<3, Eigen::Vector3d, g2o::VertexSE3Expmap >
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
// Error: measure = R*point+t
virtual void computeError();
virtual void linearizeOplus();
virtual bool read( std::istream& in ){}
virtual bool write( std::ostream& out) const {}
Vector3d point_;
};
//3D-2D
//只优化位姿,不优化空间点
class EdgeProjectXYZ2UVPoseOnly: public g2o::BaseUnaryEdge<2, Eigen::Vector2d, g2o::VertexSE3Expmap >
{
public:
EIGEN_MAKE_ALIGNED_OPERATOR_NEW
virtual void computeError();
virtual void linearizeOplus();
virtual bool read( std::istream& in ){}
virtual bool write(std::ostream& os) const {};
Vector3d point_;
Camera* camera_;
};
}
#endif
g2o_types.cpp
#include "myslam/g2o_types.h"
namespace myslam
{
void EdgeProjectXYZRGBD::computeError()
{
const g2o::VertexSBAPointXYZ* point = static_cast ( _vertices[0] );
const g2o::VertexSE3Expmap* pose = static_cast ( _vertices[1] );
_error = _measurement - pose->estimate().map ( point->estimate() );
}
void EdgeProjectXYZRGBD::linearizeOplus()
{
g2o::VertexSE3Expmap* pose = static_cast ( _vertices[1] );
g2o::SE3Quat T ( pose->estimate() );
g2o::VertexSBAPointXYZ* point = static_cast ( _vertices[0] );
Eigen::Vector3d xyz = point->estimate();
Eigen::Vector3d xyz_trans = T.map ( xyz );
double x = xyz_trans[0];
double y = xyz_trans[1];
double z = xyz_trans[2];
_jacobianOplusXi = - T.rotation().toRotationMatrix();
_jacobianOplusXj ( 0,0 ) = 0;
_jacobianOplusXj ( 0,1 ) = -z;
_jacobianOplusXj ( 0,2 ) = y;
_jacobianOplusXj ( 0,3 ) = -1;
_jacobianOplusXj ( 0,4 ) = 0;
_jacobianOplusXj ( 0,5 ) = 0;
_jacobianOplusXj ( 1,0 ) = z;
_jacobianOplusXj ( 1,1 ) = 0;
_jacobianOplusXj ( 1,2 ) = -x;
_jacobianOplusXj ( 1,3 ) = 0;
_jacobianOplusXj ( 1,4 ) = -1;
_jacobianOplusXj ( 1,5 ) = 0;
_jacobianOplusXj ( 2,0 ) = -y;
_jacobianOplusXj ( 2,1 ) = x;
_jacobianOplusXj ( 2,2 ) = 0;
_jacobianOplusXj ( 2,3 ) = 0;
_jacobianOplusXj ( 2,4 ) = 0;
_jacobianOplusXj ( 2,5 ) = -1;
}
void EdgeProjectXYZRGBDPoseOnly::computeError()
{
const g2o::VertexSE3Expmap* pose = static_cast ( _vertices[0] );
_error = _measurement - pose->estimate().map ( point_ );
}
void EdgeProjectXYZRGBDPoseOnly::linearizeOplus()
{
g2o::VertexSE3Expmap* pose = static_cast ( _vertices[0] );
g2o::SE3Quat T ( pose->estimate() );
Vector3d xyz_trans = T.map ( point_ );
double x = xyz_trans[0];
double y = xyz_trans[1];
double z = xyz_trans[2];
_jacobianOplusXi ( 0,0 ) = 0;
_jacobianOplusXi ( 0,1 ) = -z;
_jacobianOplusXi ( 0,2 ) = y;
_jacobianOplusXi ( 0,3 ) = -1;
_jacobianOplusXi ( 0,4 ) = 0;
_jacobianOplusXi ( 0,5 ) = 0;
_jacobianOplusXi ( 1,0 ) = z;
_jacobianOplusXi ( 1,1 ) = 0;
_jacobianOplusXi ( 1,2 ) = -x;
_jacobianOplusXi ( 1,3 ) = 0;
_jacobianOplusXi ( 1,4 ) = -1;
_jacobianOplusXi ( 1,5 ) = 0;
_jacobianOplusXi ( 2,0 ) = -y;
_jacobianOplusXi ( 2,1 ) = x;
_jacobianOplusXi ( 2,2 ) = 0;
_jacobianOplusXi ( 2,3 ) = 0;
_jacobianOplusXi ( 2,4 ) = 0;
_jacobianOplusXi ( 2,5 ) = -1;
}
void EdgeProjectXYZ2UVPoseOnly::computeError()
{
const g2o::VertexSE3Expmap* pose = static_cast ( _vertices[0] );
_error = _measurement - camera_->camera2pixel (
pose->estimate().map(point_) );
}
void EdgeProjectXYZ2UVPoseOnly::linearizeOplus()
{
g2o::VertexSE3Expmap* pose = static_cast ( _vertices[0] );
g2o::SE3Quat T ( pose->estimate() );
Vector3d xyz_trans = T.map ( point_ );
double x = xyz_trans[0];
double y = xyz_trans[1];
double z = xyz_trans[2];
double z_2 = z*z;
_jacobianOplusXi ( 0,0 ) = x*y/z_2 *camera_->fx_;
_jacobianOplusXi ( 0,1 ) = - ( 1+ ( x*x/z_2 ) ) *camera_->fx_;
_jacobianOplusXi ( 0,2 ) = y/z * camera_->fx_;
_jacobianOplusXi ( 0,3 ) = -1./z * camera_->fx_;
_jacobianOplusXi ( 0,4 ) = 0;
_jacobianOplusXi ( 0,5 ) = x/z_2 * camera_->fx_;
_jacobianOplusXi ( 1,0 ) = ( 1+y*y/z_2 ) *camera_->fy_;
_jacobianOplusXi ( 1,1 ) = -x*y/z_2 *camera_->fy_;
_jacobianOplusXi ( 1,2 ) = -x/z *camera_->fy_;
_jacobianOplusXi ( 1,3 ) = 0;
_jacobianOplusXi ( 1,4 ) = -1./z *camera_->fy_;
_jacobianOplusXi ( 1,5 ) = y/z_2 *camera_->fy_;
}
}
八、VisualOdometry.h
#ifndef VISUALODOMETRY_H
#define VISUALODOMETRY_H
#include "myslam/common_include.h"
#include "myslam/map.h"
#include
namespace myslam
{
class VisualOdometry
{
public:
typedef shared_ptr Ptr;
enum VOState { //枚举类型,VO的三种状态,初始化、正常、丢失
INITIALIZING=-1,
OK=0,
LOST
};
//VO状态、地图(关键帧和特征点)、参考帧、当前帧
VOState state_; // current VO status
Map::Ptr map_; // map with all frames and map points
Frame::Ptr ref_; // 参考帧
Frame::Ptr curr_; // 目前帧
//1、ORB部分去掉了参考帧3D点、描述子
cv::Ptr orb_; // orb detector and computer
vector keypoints_curr_; // 目前帧的关键点
Mat descriptors_curr_; // 目前帧的描述子
//2、匹配变成了地图点3D(match_3dpts_)和帧中关键点2d(match_2dkp_index_)
cv::FlannBasedMatcher matcher_flann_; // 快速最近邻匹配器,还记得前面一直用的是暴力匹配吗?
vector match_3dpts_; // matched 3d points
vector match_2dkp_index_; // matched 2d pixels (index of kp_curr)
//3、T变成了Tcw而不是之前的Tcr,当前帧直接和地图点区别绝对变化位姿,而非与参考帧之间找相对位姿变化
SE3 T_c_w_estimated_; // 目前帧的估计位姿
int num_inliers_; // number of inlier features in icp
int num_lost_; // number of lost times
// parameters
int num_of_features_; // number of features
double scale_factor_; // scale in image pyramid
int level_pyramid_; // number of pyramid levels
float match_ratio_; // ratio for selecting good matches
int max_num_lost_; // max number of continuous lost times
int min_inliers_; // minimum inliers
double key_frame_min_rot; // minimal rotation of two key-frames
double key_frame_min_trans; // minimal translation of two key-frames
double map_point_erase_ratio_; // remove map point ratio
public: // functions
VisualOdometry();
~VisualOdometry();
bool addFrame( Frame::Ptr frame ); // add a new frame
protected:
// inner operation
void extractKeyPoints();
void computeDescriptors();
void featureMatching();
void poseEstimationPnP();
//维护地图的函数
void optimizeMap();
void addKeyFrame();
//往地图中添加点的函数
void addMapPoints();
bool checkEstimatedPose();
bool checkKeyFrame();
//获取视角的函数
double getViewAngle( Frame::Ptr frame, MapPoint::Ptr point );
};
}
#endif
VisualOdometry.cpp
#include
#include
#include
#include
#include
#include "myslam/config.h"
#include "myslam/visual_odometry.h"
#include "myslam/g2o_types.h"
namespace myslam
{
VisualOdometry::VisualOdometry() :
state_ ( INITIALIZING ), ref_ ( nullptr ), curr_ ( nullptr ), map_ ( new Map ), num_lost_ ( 0 ), num_inliers_ ( 0 ), matcher_flann_ ( new cv::flann::LshIndexParams ( 5,10,2 ) )
{
num_of_features_ = Config::get ( "number_of_features" );
scale_factor_ = Config::get ( "scale_factor" );
level_pyramid_ = Config::get ( "level_pyramid" );
match_ratio_ = Config::get ( "match_ratio" );
max_num_lost_ = Config::get ( "max_num_lost" );
min_inliers_ = Config::get ( "min_inliers" );
key_frame_min_rot = Config::get ( "keyframe_rotation" );
key_frame_min_trans = Config::get ( "keyframe_translation" );
map_point_erase_ratio_ = Config::get ( "map_point_erase_ratio" );
orb_ = cv::ORB::create ( num_of_features_, scale_factor_, level_pyramid_ );
}
VisualOdometry::~VisualOdometry()
{
}
bool VisualOdometry::addFrame ( Frame::Ptr frame )
{
switch ( state_ )
{
case INITIALIZING:
{
state_ = OK;
curr_ = ref_ = frame;
// extract features from first frame and add them into map
extractKeyPoints();
computeDescriptors();
addKeyFrame(); // the first frame is a key-frame
break;
}
case OK:
{
curr_ = frame;
//T_c_w_ 为世界坐标系-相机坐标系的变换矩阵, 新帧先赋值为参考帧的位姿T
curr_->T_c_w_ = ref_->T_c_w_;
extractKeyPoints();
computeDescriptors();
featureMatching();
poseEstimationPnP();
if ( checkEstimatedPose() == true ) // a good estimation
{
//T_c_w_estimated_是通过solvePnPRansac粗估计、g2o优化后的当前帧相对于局部地图的变换矩阵
curr_->T_c_w_ = T_c_w_estimated_;
optimizeMap();
num_lost_ = 0;
if ( checkKeyFrame() == true ) // is a key-frame
{
addKeyFrame();
}
}
else // bad estimation due to various reasons
{
num_lost_++;
if ( num_lost_ > max_num_lost_ )
{
state_ = LOST;
}
return false;
}
break;
}
case LOST:
{
cout<<"vo has lost."<detect ( curr_->color_, keypoints_curr_ );
cout<<"extract keypoints cost time: "<compute ( curr_->color_, keypoints_curr_, descriptors_curr_ );
cout<<"descriptor computation cost time: "< matches;
//1. 选出视野内候选点
//建立装描述子的目标图,匹配需要的是描述子
Mat desp_map;
//建立候选地图点数组
vector candidate;
//检查地图点是否是匹配需要的(地图点在当前帧可观察到)
for ( auto& allpoints: map_->map_points_ )
{
//把路标点取出,赋值给p,map_里保存着两个数据,关键帧和路标点
MapPoint::Ptr& p = allpoints.second;
// check if p in curr frame image
if ( curr_->isInFrame(p->pos_) )
{
// add to candidate
p->visible_times_++;
candidate.push_back( p );
desp_map.push_back( p->descriptor_ );
}
}
// 2. 候选点描述子地图与当前帧进行匹配
matcher_flann_.match ( desp_map, descriptors_curr_, matches );
// 3. 这里返回最小距离
float min_dis = std::min_element (
matches.begin(), matches.end(),
[] ( const cv::DMatch& m1, const cv::DMatch& m2 )
{
return m1.distance < m2.distance;
} )->distance;
// 4. candidate只是中间存储,新帧会刷新
match_3dpts_.clear();
match_2dkp_index_.clear();
for ( cv::DMatch& m : matches )
{
if ( m.distance < max ( min_dis*match_ratio_, 30.0 ) )
{
//match_3dpts_对应good matches中候选3D路标点
match_3dpts_.push_back( candidate[m.queryIdx] );
//match_2dkp_index_对应good matches当前帧中特征点
match_2dkp_index_.push_back( m.trainIdx );
}
}
cout<<"good matches: "< pts3d;
vector pts2d;
//这里用的3d-2d点,是featureMatching()函数中匹配好的
for ( int index:match_2dkp_index_ )
{
pts2d.push_back ( keypoints_curr_[index].pt );
}
for ( MapPoint::Ptr pt:match_3dpts_ )
{
pts3d.push_back( pt->getPositionCV() );
}
Mat K = ( cv::Mat_ ( 3,3 ) <<
ref_->camera_->fx_, 0, ref_->camera_->cx_,
0, ref_->camera_->fy_, ref_->camera_->cy_,
0,0,1
);
Mat rvec, tvec, inliers;
//使用随机采样一致性算法求出R t的初值
cv::solvePnPRansac ( pts3d, pts2d, K, Mat(), rvec, tvec, false, 100, 4.0, 0.99, inliers );
num_inliers_ = inliers.rows;
cout<<"pnp inliers: "< ( 0,0 ), rvec.at ( 1,0 ), rvec.at ( 2,0 ) ),
Vector3d ( tvec.at ( 0,0 ), tvec.at ( 1,0 ), tvec.at ( 2,0 ) )
);
// using bundle adjustment to optimize the pose
typedef g2o::BlockSolver> Block;
Block::LinearSolverType* linearSolver = new g2o::LinearSolverDense();
Block* solver_ptr = new Block ( linearSolver );
g2o::OptimizationAlgorithmLevenberg* solver = new g2o::OptimizationAlgorithmLevenberg ( solver_ptr );
g2o::SparseOptimizer optimizer;
optimizer.setAlgorithm ( solver );
g2o::VertexSE3Expmap* pose = new g2o::VertexSE3Expmap();
pose->setId ( 0 );
pose->setEstimate ( g2o::SE3Quat (
T_c_w_estimated_.rotation_matrix(), T_c_w_estimated_.translation()
));
optimizer.addVertex ( pose );
// edges
for ( int i=0; i ( i,0 );
// 3D -> 2D projection
EdgeProjectXYZ2UVPoseOnly* edge = new EdgeProjectXYZ2UVPoseOnly();
edge->setId ( i );
edge->setVertex ( 0, pose );
edge->camera_ = curr_->camera_.get();
edge->point_ = Vector3d ( pts3d[index].x, pts3d[index].y, pts3d[index].z );
edge->setMeasurement ( Vector2d ( pts2d[index].x, pts2d[index].y ) );
edge->setInformation ( Eigen::Matrix2d::Identity() );
optimizer.addEdge ( edge );
// set the inlier map points
match_3dpts_[index]->matched_times_++;
}
optimizer.initializeOptimization();
optimizer.optimize ( 10 );
T_c_w_estimated_ = SE3 (
pose->estimate().rotation(),
pose->estimate().translation()
);
cout<<"T_c_w_estimated_: "<T_c_w_ * T_c_w_estimated_.inverse();
Sophus::Vector6d d = T_r_c.log();
if ( d.norm() > 5.0 )
{
cout<<"reject because motion is too large: "<T_c_w_ * T_c_w_estimated_.inverse();
Sophus::Vector6d d = T_r_c.log();
Vector3d trans = d.head<3>();
Vector3d rot = d.tail<3>();
if ( rot.norm() >key_frame_min_rot || trans.norm() >key_frame_min_trans )
return true;
return false;
}
void VisualOdometry::addKeyFrame()
{
if ( map_->keyframes_.empty() )
{
// 1、first key-frame, add all 3d points into map
for ( size_t i=0; ifindDepth ( keypoints_curr_[i] );
if ( d < 0 )
continue;
//先找深度d,像素转3D世界坐标
Vector3d p_world = ref_->camera_->pixel2world (
Vector2d ( keypoints_curr_[i].pt.x, keypoints_curr_[i].pt.y ), curr_->T_c_w_, d
);
//世界坐标减去相机光心坐标,求得模长
Vector3d n = p_world - ref_->getCamCenter();//
n.normalize();
//构造一个地图点,3D点、模长、描述子、帧
MapPoint::Ptr map_point = MapPoint::createMapPoint(
p_world, n, descriptors_curr_.row(i).clone(), curr_.get()
);
//添加进地图
map_->insertMapPoint( map_point );
}
}
//2. 添加关键帧到地图中
map_->insertKeyFrame ( curr_ );
ref_ = curr_;
}
void VisualOdometry::addMapPoints()
{
// add the new map points into map
vector matched(keypoints_curr_.size(), false);
for ( int index:match_2dkp_index_ )
matched[index] = true;
for ( int i=0; ifindDepth ( keypoints_curr_[i] );
if ( d<0 )
continue;
Vector3d p_world = ref_->camera_->pixel2world (
Vector2d ( keypoints_curr_[i].pt.x, keypoints_curr_[i].pt.y ),
curr_->T_c_w_, d
);
Vector3d n = p_world - ref_->getCamCenter();
n.normalize();
MapPoint::Ptr map_point = MapPoint::createMapPoint(
p_world, n, descriptors_curr_.row(i).clone(), curr_.get()
);
map_->insertMapPoint( map_point );
}
}
void VisualOdometry::optimizeMap()
{
// remove the hardly seen and no visible points
//1. 删除地图点
for ( auto iter = map_->map_points_.begin(); iter != map_->map_points_.end(); )
{
//1.1 当前帧看不见该点,删除
if ( !curr_->isInFrame(iter->second->pos_) )
{
iter = map_->map_points_.erase(iter);
continue;
}
//1.2 匹配率=匹配次数/可见次数,过低删除
float match_ratio = float(iter->second->matched_times_)/iter->second->visible_times_;
if ( match_ratio < map_point_erase_ratio_ )
{
iter = map_->map_points_.erase(iter);
continue;
}
// 1.3 角度大于
double angle = getViewAngle( curr_, iter->second );
if ( angle > M_PI/6. )
{
iter = map_->map_points_.erase(iter);
continue;
}
// 1.4 不是好点
if ( iter->second->good_ == false )
{
// TODO try triangulate this map point
}
iter++;
}
// 2. 增加点
// 2.1 当前帧与地图匹配点少于100个,
if ( match_2dkp_index_.size()<100 )
addMapPoints();
if ( map_->map_points_.size() > 1000 )
{
// TODO map is too large, remove some one
map_point_erase_ratio_ += 0.05;
}
// 2.2 点太多于1000,增加释放率,否则维持0.1
else
map_point_erase_ratio_ = 0.1;
cout<<"map points: "<map_points_.size()<pos_ - frame->getCamCenter();
//单位化
n.normalize();
//得到角度,反余弦
return acos( n.transpose()*point->norm_ );
}
}