萌新改代码系列(一)--VINS+GPS
VINS与GPS组合
距离上次写博客过去了快一年了,这一年来我一直忙于与SLAM方向几乎没有关系的科研工作,说来惭愧,最终也没研究出个啥。最近得空,就把我之前开源的代码整理了一下,把与GPS的组合部分调好,并且利用实测数据进行了测试,应该是没什么问题的,然后就又开源了,希望感兴趣的同学们帮着挑挑毛病,然后别忘了关注、点赞、评论,最好在github上给个***小星星***。
闲话少说,github代码地址:VINS-GPS
在这个代码基础上我把轮速计也加上了,等整理一下,就开源。
很多同学问我我这个算紧组合吗,当然不算,我利用的是GPS的定位结果,又不是原始观测值(载波相位、伪距);但是又和VINS-Fusion的松组合有着明显的不同。如果要区分,借用滤波算法的名词,我觉得我的方法是闭环松组合,VINS-Fusion是开环松组合。
本篇博客主要就是介绍我代码里的一些改动,以及我的一些理解。
代码改动主要分为两个部分,分别为初始化部分的坐标系对齐,以及滑动窗口优化部分的GPS因子的构建,包括残差和雅克比的定义。主要的代码对应为两个文件Coosys.h 和 gps_factor.h。下面分别对其进行介绍。
坐标系对齐
我们都知道,VINS的初始化部分还是蛮复杂的,先SFM,然后和IMU预积分的值对齐,优化重力、尺度等一系列操作,最后得到的导航坐标系是一个水平系–即重力方向竖直向下。但是其航向与真实的地理坐标系(东北天/北东地)相差一个角度,并且尺度和重力因子也并不一定是准确的,因此,要想融合,第一步先要把坐标系统一到地理坐标系下。
针对不同的GPS频率,我的程序中有两种不同的坐标系对齐方式,最常见的GPS频率是1HZ的,VINS默认的一个滑动窗口为11帧图像,最多也就两个GPS点来参与坐标系对齐,因此,这个时候只能认为VINS自己的初始化得到的重力方向是准确的,坐标系转换参数减少成4个-即 航向角、二维的水平位移以及尺度因子。这部分的代码非常简单,参考程序中的Coosys.h文件下的getRTWC2函数。而对于高频的GPS数据,只要滑窗内的GPS数量达到3个,就可以进行空间坐标系的对齐了–即7个参数的估计,在这里我用的优化的方法进行参数求解,具体的代码参考Coosys.h剩余代码。值得注意的是旋转有三个自由度,但是代码中用四元数表示旋转,因此需要重新定义其参数的广义加法。
#ifndef VINS_C00SYS_H
#define VINS_C00SYS_H
#include gps_factor
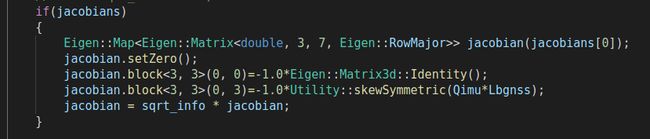
仿照 IMU_factor,写了gps_factor,一个因子最主要的部分其实是残差和雅克比,其实对于这种松组合的残差定义非常简单,唯一需要注意的是,GPS定位的坐标和IMU并不是严格在一起的,中间存在着杆臂(平移),当然我没有在线估计杆臂,我的程序认为杆臂是一个准确的值。
![]()
相应的雅克比矩阵可以手写,也很简单,也可以用ceres的自动求导,我的代码两种方法都有实现,但是为了保证和vins自己的各个factor的一致性,程序最后选择了手写雅克比。
其他改动
去掉了边缘化部分,我觉得GPS如果不参与边缘化可能会导致系统的不一致(可能也不对),但是GPS参与边缘化确实比较麻烦,鉴于我当前还有其他科研任务,索性直接删了。
double2vector函数则是不再每次固定优化起点了(表述可能有点问题,能看懂的自然懂),但是刚才大佬告诉我,如果GPS缺失,会引发较大的问题,后面我会思考看这里有没有什么比较好的处理方法。