实验笔记2
2017-11-06
概要: 理清u-boot的编译过程和工作过程, 掌握Linux Kernel的编译过程和文件结构; 根文件系统的过程分析;
(u-boot和kernel的编译和烧录过程在实验笔记1中)
u-boot (启动内核)
具体可以参考u-boot中的README文件: ./README
1. Makefile 分析
1. 配置过程: make 100ask24x0_config
具体执行的是:
@$(MKCONFIG) $(@:_config=) arm arm920t 100ask24x0 NULL s3c24x0
MKCONFIG := $(SRCTREE)/mkconfig
$(@:_config=) -- 100ask24x0
/* 所以上述命令等效于: */
mkconfig 100ask24x0 arm arm920t 100ask24x0 NULL s3c24x0
所以从Makefile中跳转到mkconfig中继续执行: mkconfig 是一个脚本文件(所以可以自阅)
结果 :
- 确定开发板的名称: BOARD_NAME;
- 创建到平台/开发板的头文件的连接;
- 创建顶层Makefile包含的文件include/config.mk;
- 创建开发板相关的头文件inclue/config.h;
2. 编译过程: make
- 编译cpu/$(CPU)/start.S;(不同的CPU, 可能还有其他的选项)
- 对于开发板/平台相关的每个目录, 使用每个目录各自的Makefile生成相应的库;
- 将前两步编译生成的 *.o, *.a 文件按照board/$(BOARDDIR)/config.mk 中指定的代码段起始地址,
board/$(BOARDDIR)/u-boot.lds 连接脚本进行连接; - 将上步生成的ELF格式的u-boot 转换为二进制格式;
2. 代码分析
裸板实验的流程(回忆)
- 初始化
- 关看门狗;
- 初始化时钟;
- 初始化SDRAM;
- 把程序从NAND FLASH 拷贝到 SDRAM;
- 设置栈;(后续需要执行C语言程序)
- 继续执行程序;
u-boot 启动流程分析
- 硬件相关初始化:
(裸板实验的流程)
- 设置栈, sp->内存; (然后调用C函数)
以上过程可以看cpu/$(CPU)/start.S
具体分析 (硬件相关初始化) [第一阶段]
- 进入设为管理模式(SVC);
- 关看门狗;
- 屏蔽中断;
- 初始化SDRAM;
- 设置SP;
- 时钟初始化;
- 重定位(程序从FLASH拷到SDRAM)
- 清理BSS段(未初始化的数据)
- 调用start_armboot;
- 读出内核
具体分析
- 初始化NAND FLASH 和 NOR FLASH;
- 能支持FLASH的读和写;
- 环境变量初始化; (默认的 && FLASH上保存的)
- 调用main_loop;(死循环)
u-boot 命令输入;
图示过程:
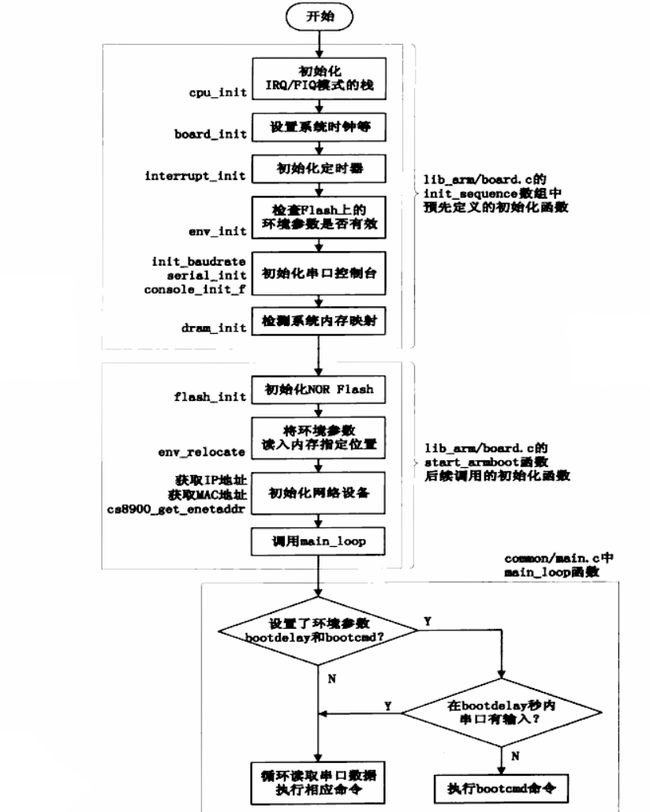 15-4.png
15-4.png
命令实现 run_command()
- 输入字符串(Name);
- Name => 动作 => 函数;
- 命令结构体cmd_tbl_s{name, maxargs, repeatable, func*, usage, help};
- find_cmd(), 比较输入字符串与命令结构体中的Name;
u-boot.lds => _u_boot_cmd_start; _u_boot_cmd_end;
.u_boot_cmd -- #define struct_Section __attribute__((unused,section (".u_boot_cmd")))
(include)
#definn U_BOOT_CMD (name, maxargs, rep, cmd, usage, help)
cmd_tbl_t __u_boot_cmd_##name Struct_Section = {#name, maxargs, rep, cmd, usage, help}
comman/Makefile
读出内核的命令 nand read.jffs2(这个后缀不需要页对齐) 0x30007FC0 kernel (mtd可见分区)
命令等效于 nand read.jffs2 0x30007FC0 0x00060000 0x00200000
Flash 存储的内核是 uImage => image_header + kernel;
image_header => {ih_load(加载地址), ih_ep(入口地址)} => kernel可以存放在内存的任意地方
bootm 命令 => 根据image_header移动kernel到合适的地方(加载地址) => 启动kernel(do_bootm_linux)
do_bootm_linux => 设置kernel启动参数 => 跳到入口地址启动kernel(theKernel()函数
u-boot和kernel数据交互: 在说定的地址以约定的格式, 存放数据。(地址: 0x30000100, 格式 struct tag)
theKernel (0, bd->bi_arch_number, bd->bi_boot_params);
/*
* bd->bi_arch_number -- 机器ID, 用于确定kernel是否支持这款板子(芯片);
* bd->bi_boot_params -- 入口地址
*/
// armlinux.c
setup_start_tag(bd);
setup_memory_tag (bd);
setup_command_line (bd, commandline);
setup_end_tag (bd);
内核 (启动应用程序)
配置
- 结果是生成了.config文件;
- .config里面的配置项有以下文件引用:
- C源码;(宏来源于 ./include/linux/autoconf.h)
- 子目录Makefile;
obj-y += xxx.o -- xxx.c最终被编译进内核里
obj-m += yyy.o -- yyy.c最终被编译成一个模块
- ./include/config/auto.conf
- ./include/linux/autoconf.h (基本所有宏定义为1)
- make uImage 时发生了下列事情:
- .config => autoconf.h;
- .config => auto.conf
分析(./Documentation/kbuild/makefiles.txt)
- 字目录下的Makefile:
- obj-y += yyy.o
- obj-m += xxx.o
- make uImage => ./arch/arm/Makefile;
- uImage <= vmlinux <= $(vmlinux-lds) $(vmlinux-init) $(vmlinux-main) $(kallsyms.o) FORCE
- vmlinux-init <= $(head-y) $(init-y)
- vmlinux-main <= $(core-y) $(libs-y) $(drivers-y) $(net-y)
- vmlinux-lds <= arch/$(ARCH)/kernel/vmlinux.lds
启动
- 处理u-boot传递的参数; (arch/arm/kernel/head.S)
- 判断是否支持这个CPU;
- 判断是否支持这个单板; <= u-boot启动内核时传入的参数(机器ID);
- 建立页表;
- 使能MMU;
- 跳转 start_kernel;
- 挂接根文件系统;
-
最终目的, 运行应用程序;
Linux内核启动过程图解:
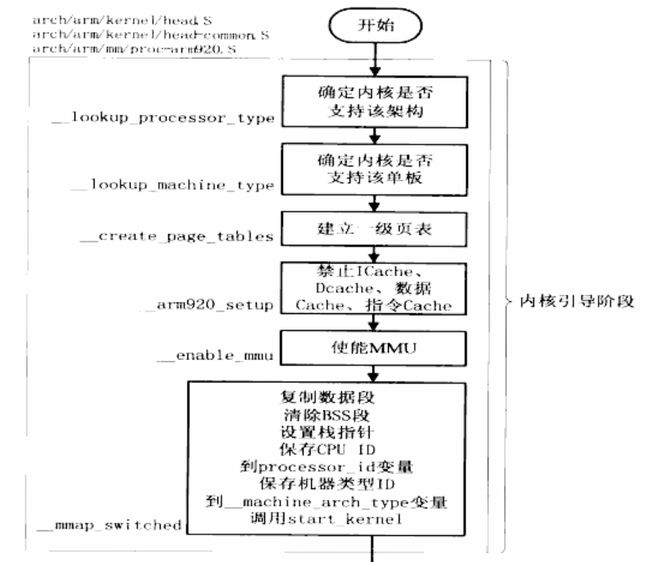 16-7(1).png
16-7(1).png
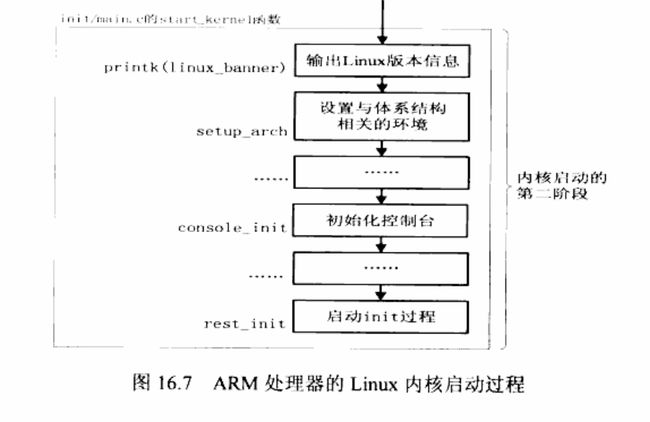
/* 内核的启动流程 (函数调用) */
start_kernel
setup_arch // 解析u-boot传入的启动参数
setup_command_line // 解析u_boot传入的启动参数
parse_early_param
do_early_param
From __setup_start To __setup_end 调用early函数
unknown_bootoption
obsolete checksetup
From __setup_start To __setup_end 调用Non early函数
rest_init
kernel_init; (创建kernel thread)
prepare_namespace
mount_root // 挂接根文件系统
init_post
// 执行应用程序 (打开 /dev/console)
PS:
分区的代码在内核中已经写定, 位置在: ./arch/arm/plat-s3c24x0/common-smdk.c
struct mtd_partition smdk_default nand_part[]={};
根文件系统 (应用程序的基础[平台])
- kernel how to start the first application:
- open ("/dev/console"); (console -- 终端)
- sys_dup(0); sys_dup(0); (复制文件, 参考系统调用dup())
- run_init_process(); (可以启动自己的定义, 没指定就是默认) // 参见: ./init/main.c
busybox -- Linux 一些基础命令的集合;
- init_main 作用:
- 读取配置文件
- 解析配置文件
- 执行用户(程序)
busy -> init_main
parse_inittab
fopen("INITTAB", "r"); //打开配置文件 /etc/inittab
//(inittab的说明文档在./examples/inittab)
new_init_action ();
run_actions(SYSINIT);
waitfor (a, 0); // 执行应用程序, 等待它执行完毕
run (a); // 创建子进程process
waitpid(runpid, &status, 0); // 等待它结束
delete_init_action (a); // 在init_action_list链表里删除
run_actions(WAIT);
waitfor (a, 0); // 执行应用程序, 等待它执行完毕
run (a); // 创建子进程process
waitpid(runpid, &status, 0); // 等待它结束
delete_init_action (a); // 在init_action_list链表里删除
run_actions(ONCE);
run (a); // 创建子进程process
delete_init_action (a); // 在init_action_list链表里删除
while (1) {
run_actions(RESPAWN);
if (a->pid == 0) {
a->pid = run (a);
}
run_actions(ASKFIRST);
if (a->pid == 0) {
a->pid = run (a);
}
wpid = wait(NULL);
while (wpid > 0){
a->pid = 0;
}
}
/* inittab 的格式:
* :::
* id => /dev/id, 用于终端: stdin, stdout, stderr: printf, scanf, err;
* runlevels => 应用程序优先级(暂时忽略)
* action => 执行时机
* process => 应用程序或程序
* 从默认的 new_init_action 中推出的配置文件格式:
* ::ctrlaltdel:reboot
* ::shutdown:umount -a -r
* ::restart:init
* ::askfirst:~/bin/sh
* tty2::askfirst:~/bin/sh
* tty3::askfirst:~/bin/sh
* tty4::askfirst:~/bin/sh
* ::sysinit:/etc/init.d/rcS
*/
static void new_init_action (int action, const char *command, const char *cons);
/* 1. 创建一个init_action 结构;
* 2. 把这个结构放入init_action_list 链表
*/
最小根文件系统所需的要素
- /dev/console ; /dev/null(当程序不指向标准输入,输出,错误时可以指向NULL)
- /etc/inittab
- 配置文件指定的程序
- 应用程序: init => busybox
- C库(若把BusyBox编译成静态的时候, 不需要C库)
制作, 烧写根文件系统; 使用NFS, 编译使用驱动文件
1. 编译, 配置BusyBox[实验版本: 1.7.0]
-
解压busybox:
tar xjf busybox-x.x.x.tar.bz2 cd busybox-x.x.x -
修改Makefile: (新版BusyBox可以在make menuconfig 设置交叉编译)
CROSS_COMPILE ?= arm-linux- -
make menuconfig:
Makefile:405: *** mixed implicit and normal rules:deprecated syntax Makefile:1242: *** mixed implicit and normal rules:deprecated syntax出现上述情况可参考编译linux kernel 时的解决方案;
make & make install:
make install :
make CONFIG_PREFIX=/path/from/root install
- Complete
2. 构建最小根文件系统
-
创建/dev/console, /dev/null
cd path/to/fs_mini mkdir dev cd dev sudo mknod console c 5 1 sudo mknod null c 1 3 -
构造一个/etc/inittab
cd path/to/fs_mini mkdir etc vi(vim) etc/inittab console::askfirst:-/bin/sh -
C库
mkdir -p /path/to/fs_mini/lib cd /path/to/gcc-3.4.5-glibc-2.3.6/arm-linux/lib cp *.so* /path/to/fs_mini/lib -d (-d 保留链接文件) -
进一步完善:
创建 proc
cd /path/to/fs_mini mkdir proc echo "::sysinit:/etc/init.d/rcS" >> etc/inittab mkdir etc/init.d; vim etc/init.d/rcS mount -t proc none /proc (挂载proc虚拟文件系统,用于收集当前正在运行的程序的信息) mount -a (读取/etc/fstab, 根据文件内容挂载) chmod +x etc/init.d/rcS vim etc/fstab #参考PC机上的/etc/fstab文件挂载proc #device mount-point type options dump fsck order proc /proc proc defaults 0 0 -
创建Dev目录: mdev (udev简化版本)[使用方法: 参考文档 -- ./docs/mdev.txt]
-
修改etc/fstab
#device mount-point type options dump fsck order sysfs /sys sysfs defaults 0 0 tmpfs /dev tmpfs defaults 0 0 -
修改etc/init.d/rcS
mount -a mkdir /dev/pts mount -t devpts devpts /dev/pts echo /sbin/mdev > /proc/sys/kernel/hotplug mdev -s
-
Complete
制作映像文件
制作yaffs2映像文件
cd /path/to/tools
tar xjf yaffs_source_util_larger_small_page_nand.tar.bz2
cd Development_util_ok
cd yaffs2/utils
make
sudo cp mkyaffs2image /usr/local/bin
sudo chmod +x /usr/local/bin/mkyaffs2image
cd path/to/fs_mini; cd ..
mkyaffs2image fs_mini fs_mini.yaffs2
制作jffs2映像文件
# 安装zlib压缩库
cd /path/to/zlib-x.x.x.tar.gz
tar xzf zlib-x.x.x.tar.gz ; cd zlib-x.x.x
./configure --shared --prefix=/usr
make ; sudo make install
# 安装mkfs.jffs2 压缩工具
cd /path/to/mtd-utils-x.x.x.tar.bz2
tar xjf mtd-utils-x.x.x.tar.bz2 ; cd mtd-utils-x.x.x/util
make && sudo make install
# 制作jffs2镜像文件
cd /path/to/fs_mini; cd ..
mkfs.jffs2 -n -s 2048 -e 128KiB -d fs_mini -o fs_mini.jffs2
# -s -- 一页的大小
# -e -- 可擦除块的大小
# 烧写jffs2文件系统镜像时需要强制指定文件系统类型
set bootargs noinitrd root=/dev/mtdblock3 rootfstype=jffs2 ....(其余选项不变)
nfs的使用 (参考内核文档: ./Documentation/nfsroot.txt)
- 安装Ubuntu的NFS的服务
sudo apt-get install nfs-kernel-server (推荐安装了一个: open-iscsi watchdog)
\\ 以防万一都装上吧;
- 设置/etc/exports:
- 确定你需要挂载的目录: /path/to/dir;
- 修改目录权限:
sudo chmod -R /path/to/dir
- 进入文件/etc/exports输入:
/path/to/dir *(rw,sync,no_root_squash) # 至于选项参考网站 [nfs安装与设置](http://www.cnblogs.com/mchina/archive/2013/01/03/2840040.html)
- 重启nfs-kernel-server服务:
sudo /etc/init.d/nfs-kernel-server restart
OR
sudo service nfs-kernel-server restart
- 在本机试挂载:
sudo mount -t nfs :
- 进入开发板进行挂载:
mkdir /mnt
mount -t nfs : >
- 解决开机挂载nfs的问题: (进入u-boot启动设置界面[在等待时, 按
进入])
set noinitrd root=/dev/nfs nfsroot=[:][,] ip=:::::: init=/linuxrc console=ttySAC0
eg:
# kernel 2.22.6
set bootargs noinitrd root=/dev/nfs nfsroot=192.168.1.25:/home/yjh/WorkSpace/nfs_root/first_fs ip=192.168.1.17:192.168.1.25:192.168.1.1:255.255.255.0::eth0:off init=/linuxrc console=ttySAC0
# kernel 3.4.2
set bootargs noinitrd root=/dev/nfs nfsroot=192.168.0.25:/home/yjh/nfs_root/new_first_mini ip=192.168.0.17:192.168.0.25:192.168.0.1:255.255.255.0::eth0:off init=/linuxrc console=ttySAC0,115200
// 具体设置以及参数意义可以参考: ./Documentation/nfsroot.txt
save
- 完成