CC2640R2F ble蓝牙 I2C解析
协议栈:simplelink_cc2640r2_sdk_1_40_00_45
-----------------------------------------------------------------------------------------------------
----------------------------------------------------------------------------------
* | Generic API Function | API Function | Description |
* |--------------------- |------------------------- |---------------------------------------------------|
* | I2C_init() | I2CCC26XX_init() | Initialize I2C driver |
* | I2C_open() | I2CCC26XX_open() | Initialize I2C HW and set system dependencies |
* | I2C_close() | I2CCC26XX_close() | Disable I2C HW and release system dependencies |
* | I2C_transfer() | I2CCC26XX_transfer() | Start I2C transfer
--------------------------------------------------------------------------------I2C.h
typedef struct I2C_Config_ *I2C_Handle;
typedef struct I2C_Transaction_ {
void *writeBuf; /*!< Buffer containing data to be written */
size_t writeCount; /*!< Number of bytes to be written to the slave */
void *readBuf; /*!< Buffer to which data is to be read into */
size_t readCount; /*!< Number of bytes to be read from the slave */
uint_least8_t slaveAddress; /*!< Address of the I2C slave peripheral */
void *arg; /*!< Argument to be passed to the callback function */
void *nextPtr; /*!< Used for queuing in I2C_MODE_CALLBACK mode */
} I2C_Transaction;
typedef enum I2C_TransferMode_ {
I2C_MODE_BLOCKING, /*!< I2C_transfer() blocks execution */
I2C_MODE_CALLBACK /*!< I2C_transfer() does not block */
} I2C_TransferMode;
typedef void (*I2C_CallbackFxn)(I2C_Handle handle, I2C_Transaction *transaction, bool transferStatus);
typedef enum I2C_BitRate_ {
I2C_100kHz = 0,
I2C_400kHz = 1
} I2C_BitRate;
typedef struct I2C_Params_ {
I2C_TransferMode transferMode; /*!< Blocking or Callback mode */
I2C_CallbackFxn transferCallbackFxn; /*!< Callback function pointer */
I2C_BitRate bitRate; /*!< I2C bus bit rate */
void *custom; /*!< Custom argument used by driver implementation */
} I2C_Params;
typedef struct I2C_FxnTable_ {
/*! Cancel all I2C data transfers */
I2C_CancelFxn cancelFxn;
/*! Close the specified peripheral */
I2C_CloseFxn closeFxn;
/*! Implementation-specific control function */
I2C_ControlFxn controlFxn;
/*! Initialize the given data object */
I2C_InitFxn initFxn;
/*! Open the specified peripheral */
I2C_OpenFxn openFxn;
/*! Initiate an I2C data transfer */
I2C_TransferFxn transferFxn;
} I2C_FxnTable;
typedef struct I2C_Config_ {
/*! Pointer to a table of driver-specific implementations of I2C APIs */
I2C_FxnTable const *fxnTablePtr;
/*! Pointer to a driver-specific data object */
void *object;
/*! Pointer to a driver-specific hardware attributes structure */
void const *hwAttrs;
} I2C_Config;
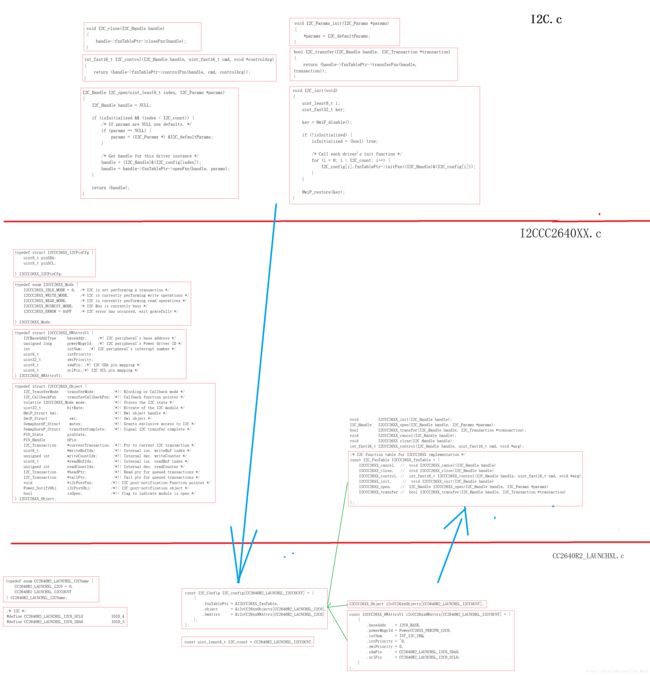
--------------------------------------------------------------------------------I2C.c
/* Default I2C parameters structure */
const I2C_Params I2C_defaultParams = {
I2C_MODE_BLOCKING, /* transferMode */
NULL, /* transferCallbackFxn */
I2C_100kHz, /* bitRate */
NULL /* custom */
};
void I2C_cancel(I2C_Handle handle)
void I2C_close(I2C_Handle handle)
int_fast16_t I2C_control(I2C_Handle handle, uint_fast16_t cmd, void *controlArg)
void I2C_init(void)
I2C_Handle I2C_open(uint_least8_t index, I2C_Params *params)
void I2C_Params_init(I2C_Params *params)
bool I2C_transfer(I2C_Handle handle, I2C_Transaction *transaction)
--------------------------------------------------------------------------------I2CCC2640XX.h
typedef struct I2CCC26XX_I2CPinCfg {
uint8_t pinSDA;
uint8_t pinSCL;
} I2CCC26XX_I2CPinCfg;
typedef enum I2CCC26XX_Mode {
I2CCC26XX_IDLE_MODE = 0, /* I2C is not performing a transaction */
I2CCC26XX_WRITE_MODE, /* I2C is currently performing write operations */
I2CCC26XX_READ_MODE, /* I2C is currently performing read operations */
I2CCC26XX_BUSBUSY_MODE, /* I2C Bus is currently busy */
I2CCC26XX_ERROR = 0xFF /* I2C error has occurred, exit gracefully */
} I2CCC26XX_Mode;
typedef struct I2CCC26XX_HWAttrsV1 {
I2CBaseAddrType baseAddr; /*! I2C peripheral's base address */
unsigned long powerMngrId; /*! I2C peripheral's Power driver ID */
int intNum; /*! I2C peripheral's interrupt number */
/*! @brief I2C Peripheral's interrupt priority. The CC26xx uses three of the priority bits, meaning
~0 has the same effect as (7 << 5).
(7 << 5) will apply the lowest priority.(1 << 5) will apply the highest priority.
Setting the priority to 0 is not supported by this driver.
Hwi's with priority 0 ignore the Hwi dispatcher to support zero-latency interrupts, thus invalidating the critical sections in this driver.*/
uint8_t intPriority;
/*! @brief I2C Swi priority.The higher the number, the higher the priority.The minimum is 0 and the maximum is 15 by default. The maximum can be reduced to save RAM by adding or modifying Swi.numPriorities in the kernel configuration file. */
uint32_t swiPriority;
uint8_t sdaPin; /*! I2C SDA pin mapping */
uint8_t sclPin;/*! I2C SCL pin mapping */
} I2CCC26XX_HWAttrsV1;
typedef struct I2CCC26XX_Object {
/* I2C control variables */
I2C_TransferMode transferMode; /*!< Blocking or Callback mode */
I2C_CallbackFxn transferCallbackFxn; /*!< Callback function pointer */
volatile I2CCC26XX_Mode mode; /*!< Stores the I2C state */
uint32_t bitRate; /*!< Bitrate of the I2C module */
/* I2C SYS/BIOS objects */
HwiP_Struct hwi;/*!< Hwi object handle */
SwiP_Struct swi; /*!< Swi object */
SemaphoreP_Struct mutex; /*!< Grants exclusive access to I2C */
SemaphoreP_Struct transferComplete; /*!< Signal I2C transfer complete */
/* PIN driver state object and handle */
PIN_State pinState;
PIN_Handle hPin;
/* I2C current transaction */
I2C_Transaction *currentTransaction; /*!< Ptr to current I2C transaction */
uint8_t *writeBufIdx; /*!< Internal inc. writeBuf index */
unsigned int writeCountIdx; /*!< Internal dec. writeCounter */
uint8_t *readBufIdx; /*!< Internal inc. readBuf index */
unsigned int readCountIdx; /*!< Internal dec. readCounter */
/* I2C transaction pointers for I2C_MODE_CALLBACK */
I2C_Transaction *headPtr; /*!< Head ptr for queued transactions */
I2C_Transaction *tailPtr; /*!< Tail ptr for queued transactions */
/* I2C power notification */
void *i2cPostFxn; /*!< I2C post-notification Function pointer */
Power_NotifyObj i2cPostObj; /*!< I2C post-notification object */
bool isOpen; /*!< flag to indicate module is open */
} I2CCC26XX_Object;
--------------------------------------------------------------------------------I2CCC2640XX.c
/* I2C function table for I2CCC26XX implementation */
const I2C_FxnTable I2CCC26XX_fxnTable = {
I2CCC26XX_cancel, // void I2CCC26XX_cancel(I2C_Handle handle)
I2CCC26XX_close, // void I2CCC26XX_close(I2C_Handle handle)
I2CCC26XX_control, // int_fast16_t I2CCC26XX_control(I2C_Handle handle, uint_fast16_t cmd, void *arg)
I2CCC26XX_init, // void I2CCC26XX_init(I2C_Handle handle)
I2CCC26XX_open, // I2C_Handle I2CCC26XX_open(I2C_Handle handle, I2C_Params *params)
I2CCC26XX_transfer // bool I2CCC26XX_transfer(I2C_Handle handle, I2C_Transaction *transaction)
};
void I2CCC26XX_init(I2C_Handle handle);
I2C_Handle I2CCC26XX_open(I2C_Handle handle, I2C_Params *params);
bool I2CCC26XX_transfer(I2C_Handle handle, I2C_Transaction *transaction);
void I2CCC26XX_cancel(I2C_Handle handle);
void I2CCC26XX_close(I2C_Handle handle);
int_fast16_t I2CCC26XX_control(I2C_Handle handle, uint_fast16_t cmd, void *arg);
==============================硬件平台特性========================
--------------------------------------------------------------------------------CC2640R2_LAUNCHXL.h
typedef enum CC2640R2_LAUNCHXL_I2CName {
CC2640R2_LAUNCHXL_I2C0 = 0,
CC2640R2_LAUNCHXL_I2CCOUNT
} CC2640R2_LAUNCHXL_I2CName;
/* I2C */
#define CC2640R2_LAUNCHXL_I2C0_SCL0 IOID_4
#define CC2640R2_LAUNCHXL_I2C0_SDA0 IOID_5
--------------------------------------------------------------------------------CC2640R2_LAUNCHXL.c
I2CCC26XX_Object i2cCC26xxObjects[CC2640R2_LAUNCHXL_I2CCOUNT];
const I2CCC26XX_HWAttrsV1 i2cCC26xxHWAttrs[CC2640R2_LAUNCHXL_I2CCOUNT] = {
{
.baseAddr = I2C0_BASE,
.powerMngrId = PowerCC26XX_PERIPH_I2C0,
.intNum = INT_I2C_IRQ,
.intPriority = ~0,
.swiPriority = 0,
.sdaPin = CC2640R2_LAUNCHXL_I2C0_SDA0,
.sclPin = CC2640R2_LAUNCHXL_I2C0_SCL0,
}
};
const I2C_Config I2C_config[CC2640R2_LAUNCHXL_I2CCOUNT] = {
{
.fxnTablePtr = &I2CCC26XX_fxnTable,
.object = &i2cCC26xxObjects[CC2640R2_LAUNCHXL_I2C0],
.hwAttrs = &i2cCC26xxHWAttrs[CC2640R2_LAUNCHXL_I2C0]
},
};
const uint_least8_t I2C_count = CC2640R2_LAUNCHXL_I2CCOUNT;