STM32新建工程标准模板和串口
STM32新建工程标准模板
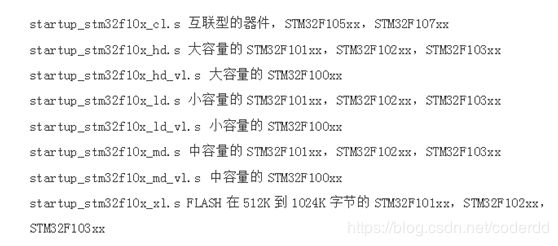
- 使用的库:STM32F10x_StdPeriph_Lib_V3.5.0.rar(STM32F103RBT6为例)
- 例如:STM32F103RBT6是128kb,则选择:medium类型。即:startup_stm32f10x_md.s。选型如下图:


- 新建工程目录文件夹以及Project档目录,如下图:
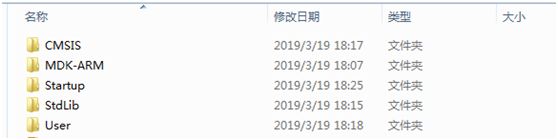
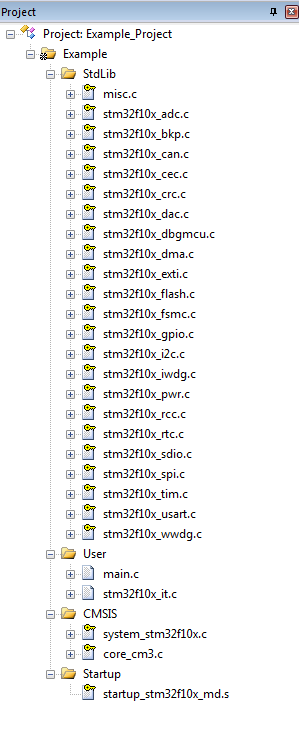
对于工程,放在MDK-ARM里面,命名可以为xxx_Project,涉及到的头文件都放在stdlib的inc里。如:stm32f10x.h,stm32f10x_conf.h。CMSIS目录文件见下图。

4.修改stm32f10x.h头文件:选择型号和选择标准库选项。主要就这两个地方。添加头文件目录。

5.编译并烧录程序,点亮一个LED灯,测试正常。对于GPIO初始化必须有GPIO_InitStructure.GPIO_Speed这个配置,否则LED不亮,之前倒没有留意过这个问题。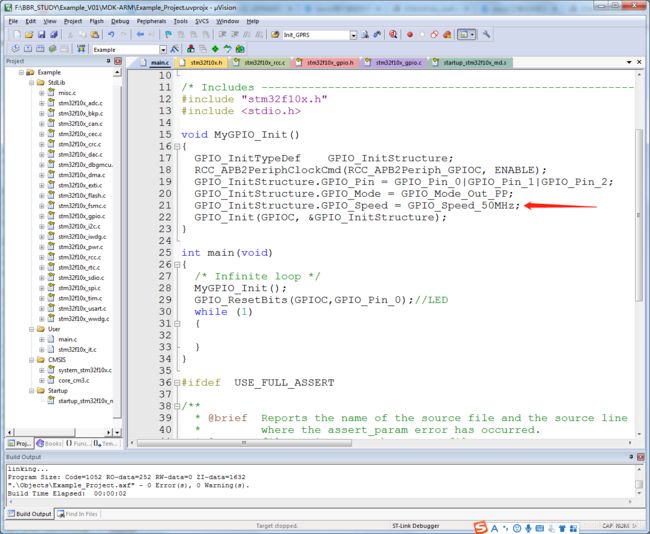
以下为程序方面记录:
1.调试查看系统时钟,特别对于无晶振系统很有用。
RCC_ClocksTypeDef RCC_Clocks;
RCC_GetClocksFreq(&RCC_Clocks);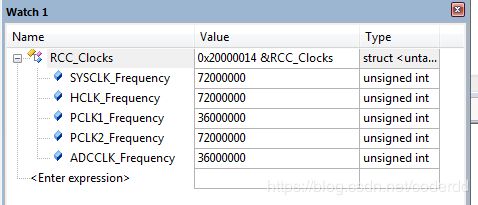
2.系统倍频。
若无外部晶振,倍频到64M,用下面代码。需要先把system_stm32f10x.c文件里的代码:#define SYSCLK_FREQ_72MHz 72000000注释掉!若用带晶振的开发板测试64M,如果不把#define ..72M 这句注释,则会直接HardFault
void SystemClk_Init()//8/2*16=64MHz
{
/* Enable Prefetch Buffer */
FLASH->ACR |= FLASH_ACR_PRFTBE;
/* Flash 2 wait state */
FLASH->ACR &= (uint32_t)((uint32_t)~FLASH_ACR_LATENCY);
FLASH->ACR |= (uint32_t)FLASH_ACR_LATENCY_2;
RCC_DeInit();
RCC_HSICmd(ENABLE);
while(RCC_GetFlagStatus(RCC_FLAG_HSIRDY) == RESET);
RCC_SYSCLKConfig(RCC_SYSCLKSource_HSI);
RCC_HSEConfig(RCC_HSE_OFF);
RCC_LSEConfig(RCC_LSE_OFF);
RCC_PLLConfig(RCC_PLLSource_HSI_Div2,RCC_PLLMul_16);
RCC_PLLCmd(ENABLE);
while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET);
RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);
while(RCC_GetSYSCLKSource() != 0x08);
}3.对于系统精确延时函数:
新建System文件夹,写delay.c和delay.h。
下面为delay.c函数:
#include "stm32f10x.h"
//////////////////////////////////////////////////////////////////////////////////
static double fac_us=0;
static RCC_ClocksTypeDef RCC_Clocks;
void delay_init()
{
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //HCLK/8->主频8分频=64/8=8MHz->1us:8
RCC_GetClocksFreq(&RCC_Clocks);
fac_us=RCC_Clocks.SYSCLK_Frequency/8000000;//fac_us=8;
}
void delay_us(unsigned int nus)
{
unsigned int ticks;
unsigned int told,tnow,tcnt=0;
unsigned int reload=SysTick->LOAD;
ticks=nus*fac_us;
tcnt=0;
told=SysTick->VAL;
while(1)
{
tnow=SysTick->VAL;
if(tnow!=told)
{
if(tnow=ticks)break;
}
};
}
void delay_ms(unsigned short nms)
{
delay_us((unsigned int)(nms*1000));
}
下面为delay.h文件:
#ifndef __DELAY_H
#define __DELAY_H
void delay_init(void);
void delay_us(unsigned int nus);
void delay_ms(unsigned short nms);
#endif主函数调用:注意顺序!!
void main()
{
...
while(SysTick_Config(8000)!=0);//此处针对无晶振并64M分频8,即systick为8M
delay_init();
...
}补充:因为SysTick_Config()函数会设置系统定时器的时钟源,所以要先放前面。SysTick_Config()函数同样也会使能系统定时器中断。
4.GPIO电平翻转,对于LED适用。
GPIOC->ODR ^= GPIO_Pin_0;//V3.5固件库
LL_GPIO_TogglePin(GPIOC,LL_GPIO_PIN_0);//LL库5.串口通信
一、普通串口方式
配置:需要注意点->开启时钟,开启中断,注册到NVIC,否则串口接收中断无效
void Uart1_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
//USART1 Tx(PA.9)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1 Rx(PA.10)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
}void Init_NVIC()
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_4);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 4;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}a.发送封装函数:
void Uart1_SendData(unsigned char data)
{
USART1->SR;
USART_SendData(USART1,data);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);
}
void Uart1_SendString(char *data)//字符串
{
while(*data)
{
Uart1_SendData(*(data++));
}
}
void Uart1_SendLength(unsigned char*DP,unsigned int num)//指定长度字符
{
for(int k=0;kb.接收中断函数:
void USART1_IRQHandler(void)
{
if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET)
{
RX_Buffer_Temp=USART_ReceiveData(USART1);
if(uart_num<498)
{
RX_Buffer[uart_num] = RX_Buffer_Temp;
uart_num++;
rec_flag=1;
}
else
{
uart_num=0;
}
}
if(USART_GetFlagStatus(USART1,USART_FLAG_ORE) == SET) // ORE
{
USART_ClearFlag(USART1,USART_FLAG_ORE);
RX_Buffer_Temp=USART_ReceiveData(USART1);
}
}二、DMA串口收发
1.配置差异:
void Uart1_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
//USART1 Tx(PA.9)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1 Rx(PA.10)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
//USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_DMACmd(USART1,USART_DMAReq_Rx,ENABLE);
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);
}
串口DMA空闲中断接收数据
通用配置如下:
void Uart1_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_USART1, ENABLE);
//USART1 Tx(PA.9)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//USART1 Rx(PA.10)
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitTypeDef USART_InitStructure;
USART_InitStructure.USART_BaudRate = 9600;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_Init(USART1, &USART_InitStructure);
USART_Cmd(USART1, ENABLE);
//USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);//如果写了这个就需要在空闲中断处理!
}void Usart1_DMA_init()
{
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
/* 接收通道 */
DMA_DeInit(DMA1_Channel5);
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)&USART1->DR;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&USART_RX_BUF;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
DMA_InitStructure.DMA_BufferSize = sizeof(USART_RX_BUF);//此值很重要
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_Medium;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel5, &DMA_InitStructure);
/* 发送通道 */
DMA_DeInit(DMA1_Channel4);
DMA_InitStructure.DMA_PeripheralBaseAddr = (uint32_t)(&USART1->DR);
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)&USART_TX_BUF;
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStructure.DMA_BufferSize = 0;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_Priority = DMA_Priority_High;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_Init(DMA1_Channel4,&DMA_InitStructure);
DMA_ITConfig(DMA1_Channel4, DMA_IT_TC, ENABLE);//传输完成
DMA_ITConfig(DMA1_Channel5, DMA_IT_TC, ENABLE);
DMA_Cmd(DMA1_Channel5, ENABLE);
DMA_Cmd(DMA1_Channel4, ENABLE);
USART_DMACmd(USART1,USART_DMAReq_Tx,ENABLE);
USART_DMACmd(USART1,USART_DMAReq_Rx,ENABLE);
}
A.串口DAM发送
很简单,直接上代码,关于配置通用。因为每次发送都要重新配置发送字节长度,所以配置的时候DMA_InitStructure.DMA_BufferSize = 0;这个就无所谓了。但是接收不一样。见下面分析。
void Uart1_DMA_Send(unsigned char * buff, unsigned int len)//发送封装函数
{
memcpy(USART_TX_BUF, buff, len);
DMA_Cmd(DMA1_Channel4, DISABLE);
DMA1_Channel4->CMAR = (u32)USART_TX_BUF;
DMA_SetCurrDataCounter(DMA1_Channel4, len);
DMA_Cmd(DMA1_Channel4, ENABLE);
}
下面是DMA串口发送完成中断,也可以加一些处理函数,但目前没用到。
void DMA1_Channel4_IRQHandler(void)
{
if(DMA_GetITStatus(DMA1_IT_TC4) == SET)//发送传输完成
{
DMA_ClearFlag(DMA1_IT_TC4);
...
}
}B.串口DMA接收
目前来看,DMA接收最有价值的就是空闲中断接收,这样可以判断不定长字节接收。先讨论下定长数据接收,这里有个接收完成中断其实可以很好的利用。见代码:
void DMA1_Channel5_IRQHandler(void)
{
if(DMA_GetITStatus(DMA1_IT_TC5) == SET)//接收完成
{
DMA_ClearFlag(DMA1_IT_TC5);
DMA_Cmd(DMA1_Channel5, DISABLE);
DMA1_Channel5->CMAR = (uint32_t)USART_RX_BUF;//存放的数组buffer
DMA1_Channel5->CNDTR = 5; //这个值就是接收的定长值,自己定义
DMA_Cmd(DMA1_Channel5, ENABLE);
...//这里可以加标志位,在主函数处理接收的数据
}
}注意:对于接收配置项DMA_InitStructure.DMA_BufferSize = 5;//sizeof(USART_RX_BUF);这个值要么配置的时候先规定好,要么在主函数的时候调用DMA1_Channel5->CNDTR = 5;重新写入,否则不正确的话肯定进不了完成中断。此完成中断只有达到接收的个数大于等于设置的值才会进入中断,但是不影响DMA接收。对于USART_ITConfig函数,如果ENABLE了,就需要写对应的中断函数,否则直接卡死。
下面写不定长DMA接收,利用空闲中断处理,需要USART_ITConfig(USART1, USART_IT_IDLE, ENABLE);
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
代码如下:
void USART1_IRQHandler(void)
{
unsigned char uart_info=0;
uart_info=uart_info;//不加的话keil5会警告,原因自行百度
if(USART_GetITStatus(USART1,USART_IT_IDLE) == SET)//串口空闲中断
{
uart_info = USART1->SR;
uart_info = USART1->DR;
DMA_Cmd(DMA1_Channel5,DISABLE);
dma_recv_num = 200 - DMA_GetCurrDataCounter(DMA1_Channel5);//接收数据长度
DMA1_Channel5->CNDTR=200;//最大缓存
DMA_Cmd(DMA1_Channel5,ENABLE);
dma_receive_flag = 1;//设定标志位
}
}
测试DMA空闲串口中断接收到的数据再用DMA发到到外设。高强度100ms收发测试。
int main(void)
{
MyGPIO_Init();
SystemClk_Init();
Uart1_Init();
Usart1_DMA_init();
while(SysTick_Config(8000)!=0);
delay_init();
//RCC_GetClocksFreq(&RCC_Clocks);
Init_NVIC();
while (1)
{
if(dma_receive_flag)
{
dma_receive_flag=0;
memcpy(RT_Buffer, USART_RX_BUF, dma_recv_num);
Uart1_DMA_Send(RT_Buffer,dma_recv_num);
}
}
}
void USART1_IRQHandler(void)
{
unsigned char uart_info=0;
uart_info=uart_info;
if(USART_GetITStatus(USART1,USART_IT_IDLE) == SET)
{
uart_info = USART1->SR;
uart_info = USART1->DR;
DMA_Cmd(DMA1_Channel5,DISABLE);
dma_recv_num = 200 - DMA_GetCurrDataCounter(DMA1_Channel5);
DMA1_Channel5->CNDTR=200;
DMA_Cmd(DMA1_Channel5,ENABLE);
dma_receive_flag = 1;
}
}
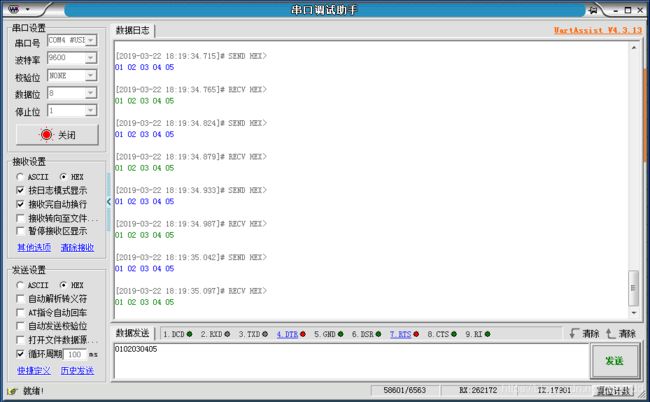
串口助手测试100ms循环发送接收5个字节无问题!
printf函数调用(debug_printf.c)
//标准库写法
int fputc(int ch, FILE *f)
{
USART_SendData(USART1, (uint8_t) ch);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
return (ch);
}
//禁用半主机模式
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
};
FILE __stdout;
void _sys_exit(int x)
{
x = x;
}//HAL库写法
#include
#include
#include "usart.h"
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t*)&ch,1,10);
return ch;
}
#pragma import(__use_no_semihosting)
struct __FILE
{
int handle;
};
FILE __stdout;
void _sys_exit(int x)
{
x = x;
} 直接添加上述代码,就无需使用microlib库,因为很不建议用microlib库。
LL库串口相关。(LL库相对于HAL库更接近于底层,生成代码量更少,效率更高)
SysTick_Config(64000);//内部晶振,开启systick中断
LL_USART_EnableIT_RXNE(USART1); //开启串口1接收中断
--------------------------------------------------------------
void Uart1_SendData(unsigned char data)
{
USART1->SR;
LL_USART_TransmitData8(USART1,data);
while(LL_USART_IsActiveFlag_TC(USART1)!=SET);
}
void Uart1_SendString(char *data)
{
while(*data)
{
Uart1_SendData(*(data++));
}
}
void Uart1_SendLength(char*DP,unsigned int num)
{
for(int k=0;k49)rx_count=0;
}
/* USER CODE END USART1_IRQn 0 */
/* USER CODE BEGIN USART1_IRQn 1 */
/* USER CODE END USART1_IRQn 1 */
}