gazebo moveit ros_control设置初探
1配置文件调用顺序
**_moveit_planning_execution.launch
->move_group.launch→ **_moveit_controller_manager.launch.xml (填写控制器)->controllers.yaml
2.新建controllers.yaml
3.编写一个启动文件
https://blog.csdn.net/lingchen2348/article/details/81709404
在ur5的启动过程中,执行了一条launch命令
roslaunch ur5_moveit_config ur5_moveit_planning_execution.launch sim:=true
那我们就依葫芦画瓢也编写一份相同的文件。保存为**_moveit_planning_execution.launch
比如aubo_i5_moveit_planning_execution.launch,文件位置在moveit配置文件夹中的launch目录下。
4.改写move_group.launch
修改moveit_controller_manager参数。
https://blog.csdn.net/lingchen2348/article/details/80300069
例如:
 我们注意到在moveit_planning_execution.launch文件中并没有对fake_execution进行赋值,又因为fake_execution的默认值为false所以采用实物反馈的方法
我们注意到在moveit_planning_execution.launch文件中并没有对fake_execution进行赋值,又因为fake_execution的默认值为false所以采用实物反馈的方法
5改写**_moveit_controller_manager.launch.xml
其中××为机器人的名字
例如:
 注意,上文中 find my_robot_name_moveit_config其实不准确,应该为moveit_config文件夹的名字才对如下所示:
注意,上文中 find my_robot_name_moveit_config其实不准确,应该为moveit_config文件夹的名字才对如下所示:
改写如下:
其 中robot_moveit_config/config/controllers.yaml为路径
中robot_moveit_config/config/controllers.yaml为路径
6.修改planning_context.launch
修改为
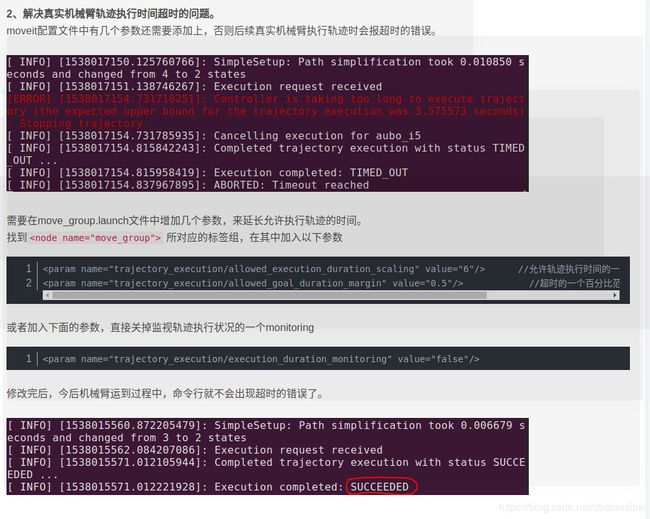
7.后面可能会遇到的情况,暂时还没遇到
8xacro的gazebo文件设置
由
改为如下内容,加载DefaultRobotHWSim配置实现与gazebo的通信
9.gazebo下面的config的trajectory_control.yaml的相关配置文件中设置pid参数
pid设置格式如下所示:
/gazebo_ros_control/pid_gains:
j1: {p: 1000.0,i: 0.0, d: 0.1, i_clamp: 1.0}
j2: {p: 1000.0,i: 0.0, d: 0.1, i_clamp: 1.0}
j3: {p: 1000.0,i: 0.0, d: 0.1, i_clamp: 1.0}
j4: {p: 1000.0,i: 0.0, d: 0.1, i_clamp: 1.0}
j5: {p: 1000.0,i: 0.0, d: 0.1, i_clamp: 1.0}
j6: {p: 1000.0,i: 0.0, d: 0.1, i_clamp: 1.0}
否则终端会显示找不到pid的设置
10.roslaunch gazebo文件下的.bringup.lauch
文件则加载rivz和gazebo
但是发现机器人在重力作用下瘫了,底座翻了,推测是底座没有固定的原因,经过查看aubo的xacro文件发下如下内容:
11.接下来的一些思考
在moveit调试助手中重新设置设置world和world_link来固定基座

发现base_link的父连杆是world,
而在其moveit生成的srdf文件中

发现设置了虚拟关节为固定关节,parent_frame为"world"
所以照猫画虎,我们需要重新配置moveit来设定world连杆和world_joint fixed关节