ardupilot 的IOMCU是怎么回事
目录
文章目录
- 目录
- 摘要
- 1.AP_IOMCU文件有啥用?
- 2.AP_IOMCU文件具体代码
- 3.总结
摘要
本节主要学习AP_IOMCU这个文件夹下的东西是做什么用的,有啥功能?
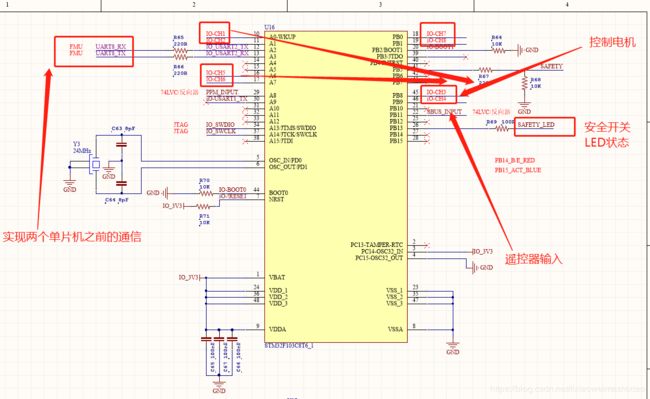
注:主要实现FMU芯片与IO芯片进行通信,完成通过数据量传输:通过FMU给IO芯片烧写bootloader,完成通过FMU计算需要输出的目标电机PWM值,完成安全开关指示灯,完成SBUS数据解析等。
为啥是这样?可以通过apm的飞控原理图可以看出,主芯片STM32F765IIK6是没有电机输出引脚的(伺服6个通道这里不考虑),废话不多说,看原理图
1.AP_IOMCU文件有啥用?
从文件名可以直接的猜测是烧写固件和建立FMU和IO之间的联系。
2.AP_IOMCU文件具体代码
void AP_IOMCU::init(void)
{
//串口初始化----- uart runs at 1.5MBit
uart.begin(1500*1000, 256, 256);
uart.set_blocking_writes(false);
uart.set_unbuffered_writes(true);
//检查IO固件CRC------ check IO firmware CRC
hal.scheduler->delay(2000);
//获取板层实例
AP_BoardConfig *boardconfig = AP_BoardConfig::get_instance();
//判断是否需要进行IOMCU的固件检测更新
if (!boardconfig || boardconfig->io_enabled() == 1)
{
check_crc();
}
//开启FMU与IO的主线程
if (!hal.scheduler->thread_create(FUNCTOR_BIND_MEMBER(&AP_IOMCU::thread_main, void), "IOMCU",
1024, AP_HAL::Scheduler::PRIORITY_BOOST, 1))
{
AP_HAL::panic("Unable to allocate IOMCU thread");
}
}
备注1:check_crc()函数
bool AP_IOMCU::check_crc(void)
{
//闪存最小尺寸是4k存储bootloader代码---- flash size minus 4k bootloader
const uint32_t flash_size = 0x10000 - 0x1000;
hal.console->printf("fw_name=%s\r\n",fw_name);
hal.console->printf("fw_size=%d\r\n",fw_size);
fw = AP_ROMFS::find_decompress(fw_name, fw_size);
if (!fw)
{
hal.console->printf("failed to find %s\n", fw_name);
return false;
}
uint32_t crc = crc_crc32(0, fw, fw_size);
// pad CRC to max size
for (uint32_t i=0; i<flash_size-fw_size; i++)
{
uint8_t b = 0xff;
crc = crc_crc32(crc, &b, 1);
}
uint32_t io_crc = 0;
if (read_registers(PAGE_SETUP, PAGE_REG_SETUP_CRC, 2, (uint16_t *)&io_crc) &&
io_crc == crc)
{
hal.console->printf("IOMCU: CRC ok\n");
crc_is_ok = true;
free(fw);
fw = nullptr;
// return true; //把这个注销可以看到FMU会给IO进行烧写代码
}
const uint16_t magic = REBOOT_BL_MAGIC;
write_registers(PAGE_SETUP, PAGE_REG_SETUP_REBOOT_BL, 1, &magic);
hal.console->printf("HHH\r\n");
if (!upload_fw())
{
free(fw);
fw = nullptr;
AP_BoardConfig::sensor_config_error("Failed to update IO firmware");
}
free(fw);
fw = nullptr;
return false;
}
备注2:upload_fw()函数实现如何烧写代码
bool AP_IOMCU::upload_fw(void)
{
// set baudrate for bootloader
uart.begin(115200, 256, 256);
bool ret = false;
/* look for the bootloader for 150 ms */
for (uint8_t i = 0; i < 15; i++)
{
ret = sync();
if (ret)
{
break;
}
hal.scheduler->delay(10);
}
if (!ret)
{
debug("IO update failed sync");
return false;
}
uint32_t bl_rev;
ret = get_info(INFO_BL_REV, bl_rev);
if (!ret)
{
debug("Err: failed to contact bootloader");
return false;
}
if (bl_rev > BL_REV)
{
debug("Err: unsupported bootloader revision %u", unsigned(bl_rev));
return false;
}
debug("found bootloader revision: %u", unsigned(bl_rev));
ret = erase();
if (!ret) {
debug("erase failed");
return false;
}
ret = program(fw_size);
if (!ret)
{
debug("program failed");
return false;
}
if (bl_rev <= 2)
{
ret = verify_rev2(fw_size);
} else
{
ret = verify_rev3(fw_size);
}
if (!ret) {
debug("verify failed");
return false;
}
ret = reboot();
if (!ret)
{
debug("reboot failed");
return false;
}
debug("update complete");
// sleep for enough time for the IO chip to boot
hal.scheduler->delay(100);
return true;
}
备注3:thread_main
void AP_IOMCU::thread_main(void)
{
thread_ctx = chThdGetSelfX();
chEvtSignal(thread_ctx, initial_event_mask);
uart.begin(1500*1000, 256, 256);
uart.set_blocking_writes(false);
uart.set_unbuffered_writes(true);
trigger_event(IOEVENT_INIT);
while (true)
{
eventmask_t mask = chEvtWaitAnyTimeout(~0, MS2ST(10));
// printf("mask=%d\r\n",mask);
//检查挂起的IO事件----- check for pending IO events
if (mask & EVENT_MASK(IOEVENT_SEND_PWM_OUT))
{
send_servo_out();
}
if (mask & EVENT_MASK(IOEVENT_INIT))
{
//设置IO_ARM_OK 和 FMU_ARMED两个参数------set IO_ARM_OK and FMU_ARMED
if (!modify_register(PAGE_SETUP, PAGE_REG_SETUP_ARMING, 0,
P_SETUP_ARMING_IO_ARM_OK |
P_SETUP_ARMING_FMU_ARMED |
P_SETUP_ARMING_RC_HANDLING_DISABLED)) {
event_failed(IOEVENT_INIT);
continue;
}
}
//安全开关关闭的处理
if (mask & EVENT_MASK(IOEVENT_FORCE_SAFETY_OFF))
{
if (!write_register(PAGE_SETUP, PAGE_REG_SETUP_FORCE_SAFETY_OFF, FORCE_SAFETY_MAGIC))
{
event_failed(IOEVENT_FORCE_SAFETY_OFF);
continue;
}
}
//安全开关打开的处理
if (mask & EVENT_MASK(IOEVENT_FORCE_SAFETY_ON))
{
if (!write_register(PAGE_SETUP, PAGE_REG_SETUP_FORCE_SAFETY_ON, FORCE_SAFETY_MAGIC))
{
event_failed(IOEVENT_FORCE_SAFETY_ON);
continue;
}
}
//设置传输速率
if (mask & EVENT_MASK(IOEVENT_SET_RATES))
{
if (!write_register(PAGE_SETUP, PAGE_REG_SETUP_ALTRATE, rate.freq) ||
!write_register(PAGE_SETUP, PAGE_REG_SETUP_PWM_RATE_MASK, rate.chmask))
{
event_failed(IOEVENT_SET_RATES);
continue;
}
}
//设置SBUS
if (mask & EVENT_MASK(IOEVENT_ENABLE_SBUS))
{
if (!write_register(PAGE_SETUP, PAGE_REG_SETUP_SBUS_RATE, rate.sbus_rate_hz) ||
!modify_register(PAGE_SETUP, PAGE_REG_SETUP_FEATURES, 0,
P_SETUP_FEATURES_SBUS1_OUT))
{
event_failed(IOEVENT_ENABLE_SBUS);
continue;
}
}
//设置温度
if (mask & EVENT_MASK(IOEVENT_SET_HEATER_TARGET))
{
if (!write_register(PAGE_SETUP, PAGE_REG_SETUP_HEATER_DUTY_CYCLE, heater_duty_cycle))
{
event_failed(IOEVENT_SET_HEATER_TARGET);
continue;
}
}
if (mask & EVENT_MASK(IOEVENT_SET_DEFAULT_RATE)) {
if (!write_register(PAGE_SETUP, PAGE_REG_SETUP_DEFAULTRATE, rate.default_freq)) {
event_failed(IOEVENT_SET_DEFAULT_RATE);
continue;
}
}
if (mask & EVENT_MASK(IOEVENT_SET_ONESHOT_ON)) {
if (!modify_register(PAGE_SETUP, PAGE_REG_SETUP_FEATURES, 0, P_SETUP_FEATURES_ONESHOT)) {
event_failed(IOEVENT_SET_ONESHOT_ON);
continue;
}
}
if (mask & EVENT_MASK(IOEVENT_SET_SAFETY_MASK))
{
if (!write_register(PAGE_SETUP, PAGE_REG_SETUP_IGNORE_SAFETY, pwm_out.safety_mask))
{
event_failed(IOEVENT_SET_SAFETY_MASK);
continue;
}
}
//检查定时事件------ check for regular timed events
uint32_t now = AP_HAL::millis();
if (now - last_rc_read_ms > 20)
{
// read RC input at 50Hz
read_rc_input();
last_rc_read_ms = AP_HAL::millis();
}
if (now - last_status_read_ms > 50)
{
// read status at 20Hz
read_status();
last_status_read_ms = AP_HAL::millis();
}
if (now - last_servo_read_ms > 50)
{
//读取20Hz时的伺服输出--- read servo out at 20Hz
read_servo();
last_servo_read_ms = AP_HAL::millis();
}
#ifdef IOMCU_DEBUG
if (now - last_debug_ms > 1000)
{
print_debug();
last_debug_ms = AP_HAL::millis();
}
#endif // IOMCU_DEBUG
if (now - last_safety_option_check_ms > 1000)
{
update_safety_options();
last_safety_option_check_ms = now;
}
//更新安全开关pwm------ update safety pwm
if (pwm_out.safety_pwm_set != pwm_out.safety_pwm_sent)
{
uint8_t set = pwm_out.safety_pwm_set;
write_registers(PAGE_DISARMED_PWM, 0, IOMCU_MAX_CHANNELS, pwm_out.safety_pwm);
pwm_out.safety_pwm_sent = set;
}
}
}
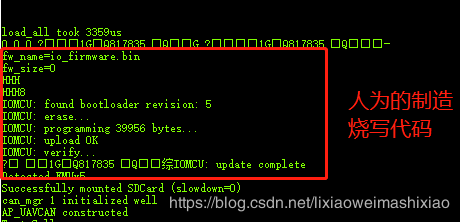
3.总结
本篇核心不在代码分析,而是重点说明FMU和IO之间的关系,后续会对代码进行细致分析。只有先理清楚他们之间的关系,才能正确分析代码实现逻辑,不然看代码很难看清楚,具体如何实现APP显示通过串口或者USB给飞控升级固件,自己已经研究过,并且实现了。有需要交流的可以联系我。不知道大家还记得我们编译出来的固件名字是ardupilot.bin或者ardupilot.apj这个吗,这里面是包含了io_firmware的代码的,从上面那个打印就可以看出,FMU通过串口完成了IO代码的同步、擦除、烧写、校验。