使用ros_control ros_controllers 的牛刀真实驱动舵机手臂的源码
现场

rqt_graph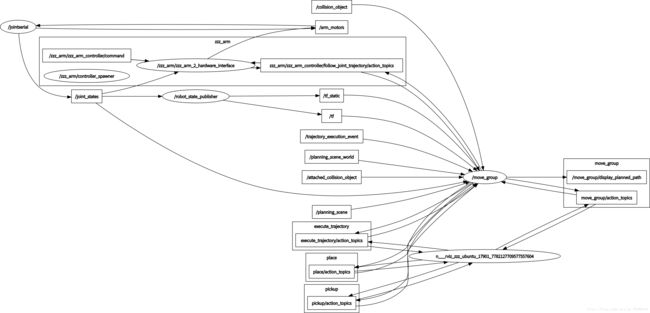
在一个陌生的框架下写代码,免不了有很多疑问与槽点。
不了解框架结构,千头万续,无从下手,说不清,理还乱。资料少没有文档,要读懂程序猿的心,就只得静下心来穿针引线般的读代码了。
让我们从这里开始吧————这到底是个什么鬼?慢慢来,哈哈
原标题
ros_control是个什么东西?
http://www.360doc.com/content/16/0509/17/33166754_557610167.shtml
ROS control-----hardware_interface简介
http://blog.csdn.net/x_r_su/article/details/53284477
RosControl学习
http://blog.csdn.net/sunanger/article/details/53033630
官方
ros_control
http://wiki.ros.org/ros_control
还是这张图看上100遍

读了这几篇,从大框框上认识一下,需要注意的点做个总结。(部分描述copy原文)
ros_control定义了机器人硬件接口和机器人控制器的抽象接口,控制器管理类controller_manager类,
其网址为: https://github.com/ros-controls/ros_control
控制器(ros_controllers)的实现类是在ros_controllers包内实现的,
其网址为: https://github.com/shadow-robot/ros_controllers
ros_control ros_controllers密切联系点
ros_controllers包中每个XXXController继承了ros_control包内的Controller
深入源码看看
ros_control包下controller_interface空间中Controller类
class Controller: public ControllerBase抽象类ControllerBase中虚函数starting,stoping,update
ros_controllers包下joint_trajectory_controller空间中JointTrajectoryController类
class JointTrajectoryController : public controller_interface::Controller实现了
bool init(HardwareInterface* hw, ros::NodeHandle& root_nh, ros::NodeHandle& controller_nh);
void starting(const ros::Time& time);
void stopping(const ros::Time& /*time*/);
void update(const ros::Time& time, const ros::Duration& period);注:JointTrajectoryController本质上是actionserver,驱动机械臂时,它和moveit的client进行交互。
gazebo仿真时
自定义插件类必须继承自gazebo_ros_control::RobotHWSim实现了模拟ros_control包中的hardware_interface::RobotHW
插件类必须实现initSim readSim writeSim
驱动真实硬件时用到ros_control类库 也要实现gezabo插件类类似的功能
写一个类继承 hardware_interface::RobotHW,用来实现各种硬件接口的注册
RobotHW 类派生自InterfaceManger
InterfaceManger类为接口管理类,提供有registerInterface函数,用于注册机器人硬件的接口类(**Interface),并可以用T* Get()函数获取接口类的对象
hardware_interface::JointStateInterface js_interface_;
hardware_interface::PositionJointInterface pj_interface_;
//....
// Register interfaces
registerInterface(&js_interface_);
registerInterface(&pj_interface_);JointStateInterface继承了HardwareResourceManager
class JointStateInterface : public HardwareResourceManager {} 又
HardwareResourceManger类继承了HardwareInterface和ResourceManger
class HardwareResourceManager : public HardwareInterface, public ResourceManagerHardwareInterface
提供claim()和clearClaim()函数用于声索资源和清除声索资源;
ResourceManger
提供registerHandle(ResourceHandle handle)向接口类注册资源handle
提供gethandle(name)获取handle对象。
层层继承下来所以JointStateInterface具有registerHandle(ResourceHandle handle)gethandle(name)功能。
unsigned int n_dof_;
std::vector joint_names_;
std::vector joint_position_;
std::vector joint_velocity_;
std::vector joint_effort_;
std::vector joint_position_command_;
joint_names_.push_back("_joint0");
joint_names_.push_back("_joint1");
joint_names_.push_back("_joint2");
n_dof_ = joint_names_.size();
joint_position_.resize(n_dof_);
joint_velocity_.resize(n_dof_);
joint_effort_.resize(n_dof_);
joint_position_command_.resize(n_dof_);
for (std::size_t i = 0; i < n_dof_; ++i)
{
// Create joint state interface for all joints
//JointstateHandle为关节状态的资源类,其内部存储有:pos,vel,effort的获取接口。
js_interface.registerHandle(hardware_interface::JointStateHandle(
joint_names_[i], &joint_position_[i], &joint_velocity_[i], &joint_effort_[i]));
// Create position joint interface
/*
类似于JointStateInterface和JointstateHandle的一组接口资源类,还有JointHandle和JointCommandInterface,其中JointHandle不但包含了Jointstatehandle的所有内容,还包括了setcommand和getcommand两个命令接口,从这个JointCommandInterface类还派生出了PositionJointInterface,VelocityJointInterface,EffortJointInterface等类,其本质是一回事,就是实现一个控制量的读取和写入接口,同时获取joint的状态。
*/
pj_interface.registerHandle(hardware_interface::JointHandle(
js_interface.getHandle(joint_names_[i]),&joint_position_command_[i]));
} 官方简例代码
https://github.com/ros-controls/ros_controllers/blob/indigo-devel/diff_drive_controller/test/diffbot.h
https://github.com/ros-controls/ros_controllers/blob/indigo-devel/diff_drive_controller/test/diffbot.cpp
不难看出要让controller manager和controller协作,就须遵循下面的套路。
main()
{
MyRobot robot;//这个class MyRobot 继承 hardware_interface::RobotHW实现read() write()
controller_manager::ControllerManager cm(&robot);
while (true)
{
robot.read(); //to access hardware driver, generally need do some wrap and customization in MyRobot class
cm.update(robot.get_time(), robot.get_period());
robot.write(); //to access hardware driver, generally need do some wrap and customization in MyRobot class
sleep();
}
}实现read write 的实现并不一定在robot类里,看具体需求,只要在合适的位置循环调用就好了,如下文官方给的baxter实例的read和write,并且是使用定时器触发代替循环的,详细请自行慢慢观摩。
实现硬件协议可以是串口 can总线或其他,我这里是用串口,关于驱动源码请看下面裸跑实例内的链接。
驱动手臂只要能给硬件下发消息,能读回关节状态就好。
其实抛弃ros_contrl裸跑其实更直观/简单/更好理解一些。
裸跑实例源码。
http://blog.csdn.net/qq_38288618/article/details/78078514
两点
moveit 控制真实机器手臂时需要controller接收 moveit的路径消息,然后把消息write到硬件上。
moveit 需要read机器手臂的状态join_states
使用ros_control的好处
只需把yaml写好 JointTrajectoryController和moveit自动取得联系。
不用自己处理actionserver
框架功能强大
让我们开始创作代码吧
......怎么,线头太多不知从何处开始,好吧,似乎还是写不出来一个实例。
那让我们找个源码做手术吧,改改改。
官方提供了Baxter的代码实例
Rethink Baxter hardware as used at the University of Colorado Boulder: Baxter on Github
https://github.com/davetcoleman/baxter_cpp/blob/hydro-devel/baxter_control/src/baxter_hardware_interface.cpp
https://github.com/davetcoleman/baxter_cpp/整个down下来
就拿它开刀!目的就是嫁接在自己的舵机手臂上能使。
仿真的部分略过不做处理,只拿自己要的。不需要的部分注释加删除,按需要添加改名。
主要修改双手臂为单手臂,关节名称,尝试调用PID的yaml信息等等,实现真实手臂运动规划的走位。
(抓手的controller没有做,由于抓手是一个电机控制两个抓手开合,应该需要写一个简单映射或者动力学的公式才行,这里翻篇)。
冗长代码开始之前先看看Baxter

代码开启
arm_interface.h
#ifndef BAXTER_CONTROL__ARM_INTERFACE_
#define BAXTER_CONTROL__ARM_INTERFACE_
// Boost
#include
// ROS
#include
#include
// ros_control
#include
#include
//#include
// Baxter
//#include
//#include
namespace zzz_arm_2_control
{
enum BaxterControlMode { POSITION, VELOCITY, TORQUE };
class ArmInterface
{
protected:
// Node Handles
ros::NodeHandle nh_; // no namespace
// Number of joints we are using
unsigned int n_dof_;
std::vector joint_names_;
std::vector joint_position_;
std::vector joint_velocity_;
std::vector joint_effort_;
std::vector joint_position_command_;
std::vector joint_effort_command_;
std::vector joint_velocity_command_;
// Track current hardware interface mode we are in
int* joint_mode_;
// Speed of hardware loop
double loop_hz_;
// Name of this arm
std::string arm_name_;
public:
/**
* \brief Constructor/Descructor
*/
ArmInterface(const std::string &arm_name, double loop_hz)
: arm_name_(arm_name),
loop_hz_(loop_hz)
{};
~ArmInterface()
{};
/**
* \brief Initialice hardware interface
* \return false if an error occurred during initialization
*/
virtual bool init(
hardware_interface::JointStateInterface& js_interface,
hardware_interface::EffortJointInterface& ej_interface,
hardware_interface::VelocityJointInterface& vj_interface,
hardware_interface::PositionJointInterface& pj_interface,
int* joint_mode,
sensor_msgs::JointStateConstPtr state_msg
)
{ return true; };
/**
* \brief Copy the joint state message into our hardware interface datastructures
*/
virtual void read( sensor_msgs::JointStateConstPtr &state_msg )
{};
/**
* \brief Publish our hardware interface datastructures commands to Baxter hardware
*/
virtual void write(ros::Duration elapsed_time)
{};
/**
* \brief This is called when Baxter is disabled, so that we can update the desired positions
*/
virtual void robotDisabledCallback()
{};
};
typedef boost::shared_ptr ArmInterfacePtr;
typedef boost::shared_ptr ArmInterfaceConstPtr;
} // namespace
#endif arm_hardware_interface.h
#ifndef BAXTER_CONTROL__ARM_HARDWARE_INTERFACE_
#define BAXTER_CONTROL__ARM_HARDWARE_INTERFACE_
// ROS
#include
// Baxter
//#include
//#include
// Parent class
#include
#include
#include
#include
#include
namespace zzz_arm_2_control
{
static const double STATE_EXPIRED_TIMEOUT = 2.0;
class ArmHardwareInterface : public ArmInterface
{
private:
// Publishers
ros::Publisher pub_joint_command_;
ros::Publisher pub_trajectory_command_;
ros::Publisher zzz_fake_joint_pub_ ;
ros::Publisher joint_motor_pub_ ;
// Subscriber
ros::Subscriber cuff_squeezed_sub_; // this is used to update the controllers when manual mode is started
// Messages to send
//baxter_core_msgs::JointCommand output_msg_;
trajectory_msgs::JointTrajectory trajectory_command_msg_;
// Track button status
bool cuff_squeezed_previous;
// Convert a joint states message to our ids
std::vector joint_id_to_joint_states_id_;
//zzzadd
// Joint limits interface
joint_limits_interface::PositionJointSoftLimitsInterface jnt_limits_interface_;
// PID controllers
std::vector pids_;
template
std::string containerToString(const T& cont, const std::string& prefix)
{
std::stringstream ss;
ss << prefix;
std::copy(cont.begin(), --cont.end(), std::ostream_iterator(ss, prefix.c_str()));
ss << *(--cont.end());
return ss.str();
}
public:
/**
* \brief Constructor/Descructor
*/
ArmHardwareInterface(const std::string &arm_name, double loop_hz);
~ArmHardwareInterface();
/**
* \brief Initialice hardware interface
* \return false if an error occurred during initialization
*/
bool init(
hardware_interface::JointStateInterface& js_interface,
hardware_interface::EffortJointInterface& ej_interface,
hardware_interface::VelocityJointInterface& vj_interface,
hardware_interface::PositionJointInterface& pj_interface,
int* joint_mode,
sensor_msgs::JointStateConstPtr state_msg
);
/**
* \brief Buffers joint state info from Baxter ROS topic
* \param
*/
void stateCallback(const sensor_msgs::JointStateConstPtr& msg);
/**
* \brief Copy the joint state message into our hardware interface datastructures
*/
void read( sensor_msgs::JointStateConstPtr &state_msg );
/**
* \brief Publish our hardware interface datastructures commands to Baxter hardware
*/
void write(ros::Duration elapsed_time);
/**
* \brief Check if the cuff manual control button is squeezed.
* \param msg - the state of the end effector cuff
*/
//void cuffSqueezedCallback(const baxter_core_msgs::DigitalIOStateConstPtr& msg);
/**
* \brief This is called when Baxter is disabled, so that we can update the desired positions
*/
void robotDisabledCallback();
/**
* \brief inform the trajectory controller to update its setpoint
*/
void publishCurrentLocation();
};
} // namespace
#endif arm_hardware_interface.cpp
#include
#include
#include
#include
#include
#include
#include
namespace zzz_arm_2_control
{
using namespace hardware_interface;
ArmHardwareInterface::ArmHardwareInterface(const std::string &arm_name, double loop_hz)
: ArmInterface(arm_name, loop_hz),
cuff_squeezed_previous(false)
{
// Populate joints in this arm
/*joint_names_.push_back(arm_name_+"_e0");
...*/
joint_names_.push_back("shoulder_zhuan_joint");
joint_names_.push_back("upper_arm_joint");
joint_names_.push_back("fore_arm_joint");
joint_names_.push_back("hand_wan_joint");
joint_names_.push_back("hand_zhuan_joint");
//joint_names_.push_back("finger_1_joint");
//joint_names_.push_back("finger_2_joint");
n_dof_ = joint_names_.size();
// Resize vectors
joint_position_.resize(n_dof_);
joint_velocity_.resize(n_dof_);
joint_effort_.resize(n_dof_);
joint_position_command_.resize(n_dof_);
joint_effort_command_.resize(n_dof_);
joint_velocity_command_.resize(n_dof_);
//output_msg_.command.resize(n_dof_);
//output_msg_.names.resize(n_dof_);
trajectory_command_msg_.joint_names.resize(n_dof_);
joint_id_to_joint_states_id_.resize(n_dof_);
for (std::size_t i = 0; i < n_dof_; ++i)
{
joint_position_[i] = 0.0;
joint_velocity_[i] = 0.0;
joint_effort_[i] = 0.0;
joint_position_command_[i] = 0.0;
joint_effort_command_[i] = 0.0;
joint_velocity_command_[i] = 0.0;
trajectory_command_msg_.joint_names[i] = joint_names_[i];
}
// Set trajectory to have two point
trajectory_msgs::JointTrajectoryPoint single_pt;
single_pt.positions.resize(n_dof_);
single_pt.time_from_start = ros::Duration(0);
trajectory_command_msg_.points.push_back(single_pt);
trajectory_msgs::JointTrajectoryPoint single_pt2;
single_pt2.positions.resize(n_dof_);
single_pt2.time_from_start = ros::Duration(0.5);
trajectory_command_msg_.points.push_back(single_pt2);
}
ArmHardwareInterface::~ArmHardwareInterface()
{
}
bool ArmHardwareInterface::init(
hardware_interface::JointStateInterface& js_interface,
hardware_interface::EffortJointInterface& ej_interface,
hardware_interface::VelocityJointInterface& vj_interface,
hardware_interface::PositionJointInterface& pj_interface,
int* joint_mode,
sensor_msgs::JointStateConstPtr state_msg)
{
joint_mode_ = joint_mode;
for (std::size_t i = 0; i < n_dof_; ++i)
{
// Create joint state interface for all joints
js_interface.registerHandle(hardware_interface::JointStateHandle(
joint_names_[i], &joint_position_[i], &joint_velocity_[i], &joint_effort_[i]));
// Create position joint interface
pj_interface.registerHandle(hardware_interface::JointHandle(
js_interface.getHandle(joint_names_[i]),&joint_position_command_[i]));
// Create velocity joint interface
vj_interface.registerHandle(hardware_interface::JointHandle(
js_interface.getHandle(joint_names_[i]),&joint_velocity_command_[i]));
// Create effort joint interface
ej_interface.registerHandle(hardware_interface::JointHandle(
js_interface.getHandle(joint_names_[i]),&joint_effort_command_[i]));
}
// Start publishers
/*pub_joint_command_ = nh_.advertise("/robot/limb/"+arm_name_+
"/joint_command",10);*/
pub_trajectory_command_ = nh_.advertise("/robot/"+arm_name_+
"_trajectory_controller/command",10);
// Start subscribers
/*cuff_squeezed_sub_ = nh_.subscribe("/robot/digital_io/" +
arm_name_ + "_lower_cuff/state",
1, &ArmHardwareInterface::cuffSqueezedCallback, this);
*/
zzz_fake_joint_pub_ = nh_.advertise("/move_group/fake_controller_joint_states", 1);
joint_motor_pub_= nh_.advertise("/arm_motors", 1000);
// Make a mapping of joint names to indexes in the joint_states message
for (std::size_t i = 0; i < n_dof_; ++i)
{
std::vector::const_iterator iter = std::find(state_msg->name.begin(), state_msg->name.end(), joint_names_[i]);
size_t joint_states_id = std::distance(state_msg->name.begin(), iter);
if(joint_states_id == state_msg->name.size())
{
ROS_ERROR_STREAM_NAMED(arm_name_,"Unable to find joint " << i << " named " << joint_names_[i] << " in joint state message");
}
joint_id_to_joint_states_id_[i] = joint_states_id;
ROS_DEBUG_STREAM_NAMED("arm_hardware_interface","Found joint " << i << " at " << joint_states_id << " named " << joint_names_[i]);
}
// Set the initial command values based on current state
for (std::size_t i = 0; i < n_dof_; ++i)
{
joint_position_command_[i] = state_msg->position[joint_id_to_joint_states_id_[i]];
// Pre-load the joint names into the output messages just once
//output_msg_.names[i] = joint_names_[i];
}
// Position joint limits interface
/* std::vector cmd_handle_names = pj_interface.getNames();
for (size_t i = 0; i < n_dof_; ++i)
{
const std::string name = cmd_handle_names[i];
JointHandle cmd_handle = pj_interface.getHandle(name);
using namespace joint_limits_interface;
boost::shared_ptr urdf_joint = urdf_model->getJoint(name);
JointLimits limits;
SoftJointLimits soft_limits;
if (!getJointLimits(urdf_joint, limits) || !getSoftJointLimits(urdf_joint, soft_limits))
{
ROS_WARN_STREAM("Joint limits won't be enforced for joint '" << name << "'.");
}
else
{
jnt_limits_interface_.registerHandle(
PositionJointSoftLimitsHandle(cmd_handle, limits, soft_limits));
ROS_DEBUG_STREAM("Joint limits will be enforced for joint '" << name << "'.");
}
}*/
// PID controllers
pids_.resize(n_dof_);
for (size_t i = 0; i < n_dof_; ++i)
{
ros::NodeHandle joint_nh(nh_, "gains/" + joint_names_[i]);
if (!pids_[i].init(joint_nh))
{
ROS_WARN_STREAM("PID data err 'gains/" << joint_names_[i] << "'.");
//return false;
}
}
ROS_INFO_NAMED(arm_name_, "Loaded zzz_arm_2_hardware_interface.");
return true;
}
void ArmHardwareInterface::read( sensor_msgs::JointStateConstPtr &state_msg )
{
// Copy state message to our datastructures
//ROS_INFO_STREAM_NAMED("arm_hardware_interface","n_dof_="< " << joint_id_to_joint_states_id_[i] << " position= " << state_msg->position[joint_id_to_joint_states_id_[i]]);
std::size_t sp=state_msg->position.size();
std::size_t sv=state_msg->velocity.size();
std::size_t se=state_msg->effort.size();
joint_position_[i] = sp>joint_id_to_joint_states_id_[i]?state_msg->position[joint_id_to_joint_states_id_[i]]:0.0;
joint_velocity_[i] = sv>joint_id_to_joint_states_id_[i]?state_msg->velocity[joint_id_to_joint_states_id_[i]]:0.0;
joint_effort_[i] = se>joint_id_to_joint_states_id_[i]?state_msg->effort[joint_id_to_joint_states_id_[i]]:0.0;
}
}
void ArmHardwareInterface::write(ros::Duration elapsed_time)
{
// Enforce joint limits
//jnt_limits_interface_.enforceLimits(elapsed_time);
zzz_arm_2_control_driver_msgs::joint_msg joint_motor_msg;
// Compute and send commands
sensor_msgs::JointState joint_state_msg;
joint_state_msg.name.resize(n_dof_);
joint_state_msg.position.resize(n_dof_);
joint_state_msg.header.stamp = ros::Time::now();
for (size_t i = 0; i < n_dof_; ++i)
{
//const double error = joint_position_command_[i] - joint_position_[i];
//const double effort = pids_[i].computeCommand(error, elapsed_time);
joint_motor_msg.id=i;
joint_motor_msg.r=joint_position_command_[i];
joint_motor_pub_.publish(joint_motor_msg);
//joint_state_msg.name[i] =joint_names_[i];
//joint_state_msg.position[i] = joint_position_command_[i] ;
//sim_joints_[i]->SetForce(0u, effort);
}
//zzz_fake_joint_pub_.publish(joint_state_msg);
ros::spinOnce();
//ROS_INFO("run write" );
// Send commands to baxter in different modes
/*switch (*joint_mode_)
{
case hardware_interface::MODE_POSITION:
output_msg_.command = joint_position_command_;
output_msg_.mode = baxter_core_msgs::JointCommand::POSITION_MODE;
break;
case hardware_interface::MODE_VELOCITY:
output_msg_.command = joint_velocity_command_;
output_msg_.mode = baxter_core_msgs::JointCommand::VELOCITY_MODE;
break;
case hardware_interface::MODE_EFFORT:
output_msg_.command = joint_effort_command_;
output_msg_.mode = baxter_core_msgs::JointCommand::TORQUE_MODE;
break;
}*/
// Publish
//pub_joint_command_.publish(output_msg_);
}
/*
void ArmHardwareInterface::cuffSqueezedCallback(const baxter_core_msgs::DigitalIOStateConstPtr& msg)
{
// Check if button is pressed
if( msg->state == 1 )
{
cuff_squeezed_previous = true;
}
else // button not pressed
{
if ( cuff_squeezed_previous )
{
publishCurrentLocation();
}
cuff_squeezed_previous = false;
}
}
*/
void ArmHardwareInterface::publishCurrentLocation()
{
// Publish this new trajectory just once, on cuff release
ROS_INFO_STREAM_NAMED(arm_name_, "Sent updated trajectory to trajectory controller");
// Update the trajectory message with the current positions
for (std::size_t i = 0; i < n_dof_; ++i)
{
trajectory_command_msg_.points[0].positions[i] = joint_position_[i];
trajectory_command_msg_.points[1].positions[i] = joint_position_[i];
}
// Send a trajectory
pub_trajectory_command_.publish(trajectory_command_msg_);
}
void ArmHardwareInterface::robotDisabledCallback()
{
publishCurrentLocation();
}
} // namespace zzz_arm_2_hardware_interface.h
#ifndef BAXTER_CONTROL__BAXTER_HARDWARE_INTERFACE_
#define BAXTER_CONTROL__BAXTER_HARDWARE_INTERFACE_
// Boost
#include
// ROS
#include
// ros_control
#include
#include
#include
//#include
#include
// Baxter
//#include
#include
#include
//#include
namespace zzz_arm_2_control
{
static const double NUM_BAXTER_JOINTS = 5;
class ZZZArm2HardwareInterface : public hardware_interface::RobotHW
{
private:
// Node Handles
ros::NodeHandle nh_; // no namespace
// Timing
ros::Duration control_period_;
ros::Time last_sim_time_ros_;
ros::Duration elapsed_time_;
double loop_hz_;
// Interfaces
hardware_interface::JointStateInterface js_interface_;
//hardware_interface::JointModeInterface jm_interface_;
hardware_interface::EffortJointInterface ej_interface_;
hardware_interface::VelocityJointInterface vj_interface_;
hardware_interface::PositionJointInterface pj_interface_;
// baxter helper
//baxter_control::BaxterUtilities baxter_util_;
// sub-hardware interfaces
ArmInterfacePtr right_arm_hw_;
//ArmInterfacePtr left_arm_hw_;
boost::shared_ptr controller_manager_;
ros::Timer non_realtime_loop_;
bool in_simulation_;
// Which joint mode are we in
int joint_mode_;
// Buffer of joint states to share between arms
sensor_msgs::JointStateConstPtr state_msg_;
ros::Time state_msg_timestamp_;
// Subscriber
ros::Subscriber sub_joint_state_;
public:
/**
* \brief Constructor/Descructor
*/
ZZZArm2HardwareInterface(bool in_simulation);
~ZZZArm2HardwareInterface();
/**
* \brief Checks if the state message from Baxter is out of date
* \return true if expired
*/
bool stateExpired();
void stateCallback(const sensor_msgs::JointStateConstPtr& msg);
void update(const ros::TimerEvent& e);
};
} // namespace
#endif
zzz_arm_2_hardware_interface.cpp
#include
namespace zzz_arm_2_control
{
ZZZArm2HardwareInterface::ZZZArm2HardwareInterface(bool in_simulation)
: in_simulation_(in_simulation),
joint_mode_(1),
loop_hz_(75)//controller update speed
{
if( in_simulation_ )
{
ROS_INFO_STREAM_NAMED("hardware_interface","Running in simulation mode");
//right_arm_hw_.reset(new zzz_arm_2_control::ArmSimulatorInterface("right",loop_hz_));
//left_arm_hw_.reset(new zzz_arm_2_control::ArmSimulatorInterface("left",loop_hz_));
}
else
{
ROS_INFO_STREAM_NAMED("hardware_interface","Running in hardware mode");
right_arm_hw_.reset(new zzz_arm_2_control::ArmHardwareInterface("right",loop_hz_));
//left_arm_hw_.reset(new zzz_arm_2_control::ArmHardwareInterface("left",loop_hz_));
}
// Set the joint mode interface data
//jm_interface_.registerHandle(hardware_interface::JointModeHandle("joint_mode", &joint_mode_));
// Start the shared joint state subscriber
sub_joint_state_ = nh_.subscribe("/robot/joint_states", 1,
&ZZZArm2HardwareInterface::stateCallback, this);
// Wait for first state message to be recieved if we are not in simulation
if (!in_simulation_)
{
// Loop until we find a joint_state message from Baxter
do
{
// Loop until we get our first joint_state message
while(ros::ok() && state_msg_timestamp_.toSec() == 0)
{
ROS_INFO_STREAM_NAMED("hardware_interface","Waiting for first state message to be recieved");
ros::spinOnce();
ros::Duration(0.25).sleep();
}
} while (state_msg_->name.size() < NUM_BAXTER_JOINTS);
}
// Initialize right arm
right_arm_hw_->init(js_interface_, ej_interface_, vj_interface_, pj_interface_, &joint_mode_, state_msg_);
//left_arm_hw_->init(js_interface_, ej_interface_, vj_interface_, pj_interface_, &joint_mode_, state_msg_);
// Register interfaces
registerInterface(&js_interface_);
//registerInterface(&jm_interface_);
registerInterface(&ej_interface_);
registerInterface(&vj_interface_);
registerInterface(&pj_interface_);
// Enable baxter
/*bool enabled = false;
while(!enabled)
{
if( !baxter_util_.enableBaxter() )
{
ROS_WARN_STREAM_NAMED("hardware_interface","Unable to enable Baxter, retrying...");
ros::Duration(0.5).sleep();
ros::spinOnce();
}
else
{
enabled = true;
}
}
*/
// Set callback for Baxter being disabled
//baxter_util_.setDisabledCallback(boost::bind( &ArmInterface::robotDisabledCallback, right_arm_hw_ ));
//baxter_util_.setDisabledCallback(boost::bind( &ArmInterface::robotDisabledCallback, left_arm_hw_ ));
// Create the controller manager
ROS_DEBUG_STREAM_NAMED("hardware_interface","Loading controller_manager");
controller_manager_.reset(new controller_manager::ControllerManager(this, nh_));
ros::Duration update_freq = ros::Duration(1.0/loop_hz_);
non_realtime_loop_ = nh_.createTimer(update_freq, &ZZZArm2HardwareInterface::update, this);
ROS_INFO_NAMED("hardware_interface", "Loaded baxter_hardware_interface.");
}
ZZZArm2HardwareInterface::~ZZZArm2HardwareInterface()
{
//baxter_util_.disableBaxter();
}
bool ZZZArm2HardwareInterface::stateExpired()
{
// Check that we have a non-expired state message
// \todo lower the expiration duration
if( ros::Time::now() > state_msg_timestamp_ + ros::Duration(STATE_EXPIRED_TIMEOUT)) // check that the message timestamp is no older than 1 second
{
ROS_WARN_STREAM_THROTTLE_NAMED(1,"hardware_interface","State expired. Last recieved state " << (ros::Time::now() - state_msg_timestamp_).toSec() << " seconds ago." );
return true;
}
return false;
}
void ZZZArm2HardwareInterface::stateCallback(const sensor_msgs::JointStateConstPtr& msg)
{
//ROS_INFO("size=%d",msg->name.size());
// Check if this message has the correct number of joints
if( msg->name.size() < NUM_BAXTER_JOINTS )
{
return;
}
// Copy the latest message into a buffer
state_msg_ = msg;
state_msg_timestamp_ = ros::Time::now();
}
void ZZZArm2HardwareInterface::update(const ros::TimerEvent& e)
{
//ROS_INFO("update");
// Check if state msg from Baxter is expired
if( !in_simulation_ && stateExpired() )
return;
elapsed_time_ = ros::Duration(e.current_real - e.last_real);
// Input
right_arm_hw_->read(state_msg_);
//left_arm_hw_->read(state_msg_);
// Control
controller_manager_->update(ros::Time::now(), elapsed_time_);
// Output
right_arm_hw_->write(elapsed_time_);
//left_arm_hw_->write(elapsed_time_);
}
} // namespace
int main(int argc, char** argv)
{
ROS_INFO_STREAM_NAMED("zzz_arm_2_hardware_interface","Starting hardware interface...");
ros::init(argc, argv, "zzz_arm_2_hardware_interface");
// Allow the action server to recieve and send ros messages
ros::AsyncSpinner spinner(4);
spinner.start();
ros::NodeHandle nh;
bool in_simulation = false;
// Parse command line arguments
for (std::size_t i = 0; i < argc; ++i)
{
if( std::string(argv[i]).compare("--simulation") == 0 )
{
ROS_INFO_STREAM_NAMED("main","zzz arm Hardware Interface in simulation mode");
in_simulation = true;
}
}
zzz_arm_2_control::ZZZArm2HardwareInterface zzzarm(in_simulation);
//ros::spin();//error
ros::waitForShutdown();
ROS_INFO_STREAM_NAMED("hardware_interface","Shutting down.");
return 0;
}
ros_control 使用的yaml
zzz_arm:
zzz_arm_controller:
type: position_controllers/JointTrajectoryController
joints:
- shoulder_zhuan_joint
- upper_arm_joint
- fore_arm_joint
- hand_wan_joint
- hand_zhuan_joint
constraints:
goal_time: &goal_time_constraint 10.0
shoulder_zhuan_joint:
goal: &goal_pos_constraint 0.5
upper_arm_joint:
goal: *goal_pos_constraint
fore_arm_joint:
goal: *goal_pos_constraint
hand_wan_joint:
goal: *goal_pos_constraint
hand_zhuan_joint:
goal: *goal_pos_constraint
zzz_grapper_controller:
type: position_controllers/JointTrajectoryController
joints:
- finger_1_joint
- finger_2_joint
constraints:
goal_time: *goal_time_constraint
finger_1_joint:
goal: *goal_pos_constraint
finger_2_joint:
goal: *goal_pos_constraint
# Publish all joint states -----------------------------------
joint_state_controller:
type: joint_state_controller/JointStateController
publish_rate: 50
gains:
shoulder_zhuan_joint: {p: 3.0, i: 0.01, d: 1.1, i_clamp: 1.0}
upper_arm_joint: {p: 3.0, i: 0.01, d: 1.1, i_clamp: 1.0}
fore_arm_joint: {p: 3.0, i: 0.01, d: 1.1, i_clamp: 1.0}
hand_wan_joint: {p: 3.0, i: 0.01, d: 1.1, i_clamp: 1.0}
hand_zhuan_joint: {p: 3.0, i: 0.01, d: 1.1, i_clamp: 1.0}
finger_1_joint: {p: 3.0, i: 0.01, d: 1.0, i_clamp: 1.0}
finger_2_joint: {p: 3.0, i: 0.01, d: 1.0, i_clamp: 1.0}moveit使用的yaml
controller_list:
- name: zzz_arm/zzz_arm_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- shoulder_zhuan_joint
- upper_arm_joint
- fore_arm_joint
- hand_wan_joint
- hand_zhuan_joint
- name: zzz_arm/zzz_grapper_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- finger_1_joint
- finger_2_jointlaunch 调用controller_manager 来启动 controllers
可视化查看 controllers情况
sudo apt-get install ros-kinetic-rqt-controller-manager
zzz@zzz-ubuntu:~/rostest$ rosrun rqt_controller_manager rqt_controller_manager
qt_gui_main() found no plugin matching "rqt_controller_manager
问题出在 qt 的缓存没有更新安装插件。解决办法:
$ rm ~/.config/ros.org/rqt_gui.ini
$ rqt
错误
Spinner Monitor: single-treaded spinner after multi-threaded ones
原因
ros::AsyncSpinner spinner(4); // Use 4 threads
spinner.start();
//ros::spin();//error写成这样不知到作者是怎么编译成功的。反正我这里是过不去。解决
http://wiki.ros.org/roscpp/Overview/Callbacks%20and%20Spinning
ros::AsyncSpinner spinner(4); // Use 4 threads
spinner.start();
ros::waitForShutdown();controller spawner coudn't find the expected controller_manager ROS interface
注意ns设置
zzz_arm_2_control_driver包下创建的joint_msg,包内节点使用没任何问题。
在另外的包引用
#include
出现错误
ros fatal error: xxx/xxx.h: No such file or directory
以为是缺少配置
zzz_arm_2_control_driver
zzz_arm_2_control_driver find_package(catkin REQUIRED COMPONENTS
zzz_arm_2_control_driver
)添加了又出现新的错误
ros The library is neither a target nor built...
did you find_package() it before the subdirectory containing its code is included?
半天无解
只好新建一个只包含joint_msg 的包zzz_arm_2_control_driver_msgs
其它包引用
zzz_arm_2_control_driver_msgs
zzz_arm_2_control_driver_msgs find_package(catkin REQUIRED COMPONENTS
zzz_arm_2_control_driver_msgs
)#include 编译通过,水平菜真是不知道哪里有问题。
以后msg单独建包编译吧,有问题也能一目了然。
usb串口又忘了权限报错
terminate called after throwing an instance of 'boost::exception_detail::clone_impl
解决
sudo chmod 666 /dev/ttyUSB0
controller is taking too long to execute trajectory
舵机通信速度会影响 controller 的执行
controller update速度过快或者与舵机通信(joint_states 更新)速度过慢
controller就认为机器关节运动速度达不到要求(太慢甚至会认为没有执行动作)导致规划轨迹执行失败。
update速率根据实际情况计算(以下为不包括延时处理及等待时间的理论值,实际测试controller update在10hz左右为好)
波特率115200,每秒有11520字节被传送
通信协议
发送
位置控制#000P1500T1000!(15byte)
位置回读#000PRAD!(9byte)
接收
回读信息#000P1500!(10byte)
发送字节数计算 15+9=24 ,24×6(个舵机)=144byte
带宽全占满时是11520/144=80hz
串口joint_states更新频率controller update频率都应该匹配这个80hz
(考虑位置控制不是每次都发送因此joint_states更新频率可以适当高一点(100),考虑到ros消息非实时性controller update可以适当低一点(75))
高手用ros_control驱动 baxter
我用ros_control驱动低端的舵机手臂,是不是有杀鸡用牛刀的感觉?
好吧,还是老话,走自己的路让别人说去吧。
hello,baxter!