ROS moveit 机械臂避障运动规划
机械臂moveit编程(python)
moveit默认使用的运动规划库OMPL支持臂章规划,这里选用RRT算法,使用move group中的PlanningSceneInterface()添加障碍物,观察机械臂运动效果。
程序流程:
1.初始化需要控制的规划组,初始化场景;
2.设置运动约束(可选);
3.设置终端link;
4.清理上一次运行的残留物体
5.设置障碍物size和位姿,并使用scene.attach_box(),scene.add_box() API添加
6.设置目标位姿并进行规划运动
运行程序如下:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import rospy, sys
import thread, copy
import moveit_commander
from moveit_commander import RobotCommander, MoveGroupCommander, PlanningSceneInterface
from geometry_msgs.msg import PoseStamped, Pose
from moveit_msgs.msg import CollisionObject, AttachedCollisionObject, PlanningScene
from math import radians
from copy import deepcopy
class MoveAttachedObjectDemo:
def __init__(self):
# 初始化move_group的API
moveit_commander.roscpp_initialize(sys.argv)
# 初始化ROS节点
rospy.init_node('moveit_attached_object_demo')
# 初始化场景对象
scene = PlanningSceneInterface()
rospy.sleep(1)
# 初始化需要使用move group控制的机械臂中的arm group
arm = MoveGroupCommander('arm')
# 获取终端link的名称
end_effector_link = arm.get_end_effector_link()
# 设置位置(单位:米)和姿态(单位:弧度)的允许误差
arm.set_goal_position_tolerance(0.01)
arm.set_goal_orientation_tolerance(0.05)
# 当运动规划失败后,允许重新规划
arm.allow_replanning(True)
arm.set_planning_time(10)
# 控制机械臂回到初始化位置
arm.set_named_target('home')
arm.go()
# 移除场景中之前运行残留的物体
scene.remove_attached_object(end_effector_link, 'tool')
scene.remove_world_object('table')
scene.remove_world_object('target')
# 设置桌面的高度
table_ground = 0.6
# 设置table和tool的三维尺寸
table_size = [0.1, 0.7, 0.01]
tool_size = [0.2, 0.02, 0.02]
# 设置tool的位姿
p = PoseStamped()
p.header.frame_id = end_effector_link
p.pose.position.x = tool_size[0] / 2.0 - 0.025
p.pose.position.y = -0.015
p.pose.position.z = 0.0
p.pose.orientation.x = 0
p.pose.orientation.y = 0
p.pose.orientation.z = 0
p.pose.orientation.w = 1
# 将tool附着到机器人的终端
scene.attach_box(end_effector_link, 'tool', p, tool_size)
# 将table加入场景当中
table_pose = PoseStamped()
table_pose.header.frame_id = 'base_link'
table_pose.pose.position.x = 0.25
table_pose.pose.position.y = 0.0
table_pose.pose.position.z = table_ground + table_size[2] / 2.0
table_pose.pose.orientation.w = 1.0
scene.add_box('table', table_pose, table_size)
rospy.sleep(2)
# 更新当前的位姿
arm.set_start_state_to_current_state()
# 设置机械臂的目标位置,使用六轴的位置数据进行描述(单位:弧度)
joint_positions = [0.827228546495185, 0.29496592875743577, 1.1185644936946095, -0.7987583317769674, -0.18950024740190782, 0.11752152218233858]
arm.set_joint_value_target(joint_positions)
# 控制机械臂完成运动
arm.go()
rospy.sleep(1)
# 控制机械臂回到初始化位置
arm.set_named_target('home')
arm.go()
moveit_commander.roscpp_shutdown()
moveit_commander.os._exit(0)
if __name__ == "__main__":
MoveAttachedObjectDemo()
重点API整理
第一步初始化:在初始化中加入了一个初始化场景,PlanningSceneInterface()提供了添加和删除物体模型的功能。
moveit_commander.roscpp_initialize(sys.argv)
rospy.init_node('moveit_attached_object_demo')
scene = PlanningSceneInterface()
rospy.sleep(1)
arm = MoveGroupCommander('arm')
第二步获取终端link,并且让机器人回到home位姿
end_effector_link = arm.get_end_effector_link()
arm.set_named_target('home')
arm.go()
第三步清理之前残留的物体
scene.remove_attached_object(end_effector_link, 'tool')
scene.remove_world_object('table')
scene.remove_world_object('target')
第四步设置机器人障碍物table和tool位姿和尺寸大小
# 设置桌面的高度
table_ground = 0.6
# 设置table和tool的三维尺寸
table_size = [0.1, 0.7, 0.01]
tool_size = [0.2, 0.02, 0.02]
# 设置tool的位姿
p = PoseStamped()
p.header.frame_id = end_effector_link
p.pose.position.x = tool_size[0] / 2.0 - 0.025
p.pose.position.y = -0.015
p.pose.position.z = 0.0
p.pose.orientation.x = 0
p.pose.orientation.y = 0
p.pose.orientation.z = 0
p.pose.orientation.w = 1
# 将tool附着到机器人的终端
scene.attach_box(end_effector_link, 'tool', p, tool_size)
# 将table加入场景当中
table_pose = PoseStamped()
table_pose.header.frame_id = 'base_link'
table_pose.pose.position.x = 0.25
table_pose.pose.position.y = 0.0
table_pose.pose.position.z = table_ground + table_size[2] / 2.0
table_pose.pose.orientation.w = 1.0
scene.add_box('table', table_pose, table_size)
rospy.sleep(2)
第五步将机器人当前位姿作为运动初始位姿
arm.set_start_state_to_current_state()
第六步设置目标位姿(关节空间正运动)
joint_positions = [0.827228546495185, 0.29496592875743577, 1.1185644936946095, -0.7987583317769674, -0.18950024740190782, 0.11752152218233858]
arm.set_joint_value_target(joint_positions)
arm.go()
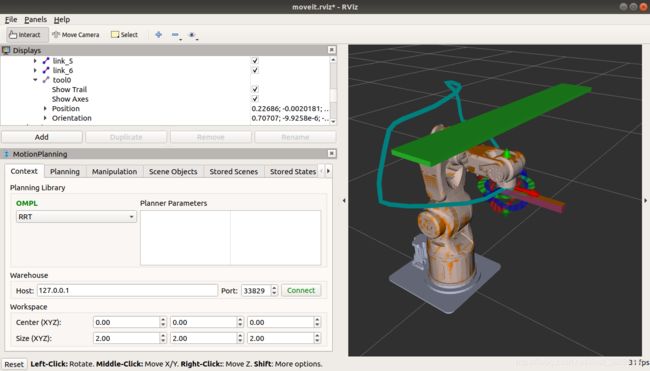
程序运行结果如下图