CORDIC算法细则
学习更多相关知识,关注博主知乎账号,用户名Trustintruth https://www.zhihu.com/people/suo-yi-xin-90/activities
算是回来补坑吧,之前的博客中使用到了CORDIC算法的应用,但是没有详细的讲,今天我们回来抛去其他的实现,再讲一讲CORDIC算法。
之前的CORDIC文章https://blog.csdn.net/stanary/article/details/79163189
CORDIC算法
----------ch1--------------------------------------------------------------
CORDIC算法是一种全能型的数学工具,因为他有能力成为其他数学函数的替代品。
CORDIC的英文全称为Coordinate Rotation Digital Comuper,其大意为不断地旋转坐标接近答案。其真正能够一直发光发热的原因是其成本是硬件可以承担的程度。
CORDIC算法有三种功能所以可以实现不少数学函数,简单的如加减乘除,典型的的是三角函数,帅气一点的就是双曲函数。CORDIC算法自定义性很强,我们完全可以按照自己的意思去调配他。
描述语言缺乏数学的天赋...也不支持浮点数....定点数的小数点被锁死,浮点数的小数点则可以跑来跑去浮点数具有更大的计数范围,定点数的优点就是重量轻,速度快...
矢量沿着圆形的轨迹进行移动。这种情况我们叫做旋转。伪旋转:
矢量每旋转一次角度就减少一些。旋转角度被视为移动距离,源矢量每一次向目标矢量逼近,下一次的距离是上一次的一半。源矢量每次向目标矢量逼近,它的长度会越来越接近目标矢量
(一).矢量移动的距离(角度)
(二).矢量移动的次数(精度)
(三).矢量移动的规则(公式)
(四).矢量移动的方向(加减)
(五).矢量最终的长度(结果)
CORDIC算法是一种统称,规则和模式可以千变万化,但原理都离不开以上5个核心。理论上,矢量只要拥有足够的移动次数,他就会越来越接近目标,而且距离也会越来越短。矢量一旦停止移动,他的最终长度就代表最终结果,如果移动次数足够,那么结果的精度也就会越高。源矢量会移动多少次才停止,这有两个控制选项
(一).矢量达到预设的移动次数。
(二).源矢量与目标矢量的距离。
一般上,移动次数可以人为,所以CORDIC算法可以随意控制他的精度与速度。换句话,要精度就拉长移动速度,要速度则缩短移动次数。CORDIC算法在执行中有一个参数会扑向(塞塔)值,这个值表示源矢量与目标矢量之间的距离,他越接近零值结果越是成熟。
CORDIC 算法除了五个核心之外,还有两个模式:
(一).矢量模式
(二).旋转模式
CORDIC算法在旋转模式下,矢量的旋转方向由角度决定,相对矢量模式,矢量的旋转方向则由坐标决定。
CORDIC算法还有三种功能/系统:
(一)线性函数。(加,减,乘,除)
(二)三角函数。(三角函数,反三角函数)
(三)双曲函数。 (双曲函数,反双曲函数,自然字数(e的x次方),自然对数 In x ,平方根)
对于定点数和浮点数来说,浮点数很慢,操作很麻烦,用硬件实现并不划算,而且可能坑死一堆低端设备。舍弃他是环境所迫。定点数是在IEEE上不被承认的数据类型。
一般情况下,3位十进制的小数点,或16位的二进制的小数就做够日常需求,若基于图像处理,比起精度,运算速度才重要。。
-------ch2--------------------------------------

公式一是CORDIC算法最原始的公式,其中x’表示下一个x坐标,y’表示下一个y坐标,塞塔表示旋转角度,上限是90度。
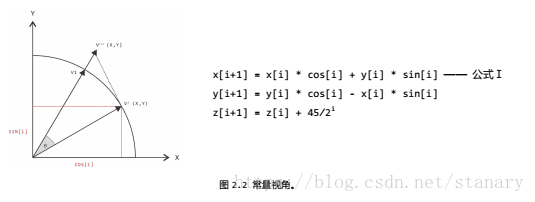
认为i是当前矢量,i+1为下一个矢量,其中x[ i ] * cos[ i ] 表示当前的 x 坐标乘上当前的cos常量,然后y*cos[ i ]表示当前的y坐标乘上当前的sin常量,两者相加成为下一个x坐标。而这些常量的来源是,角度可以看做距离,其中角度的上限是90度,矢量下一次的移动距离是上一次的一半。就结果而言,矢量每次旋转多少度,移动多少距离几乎可以预测,而且我们也可以事先建立相关的常量表。如设置16次的移动上限,所以常量表只有16位成员。
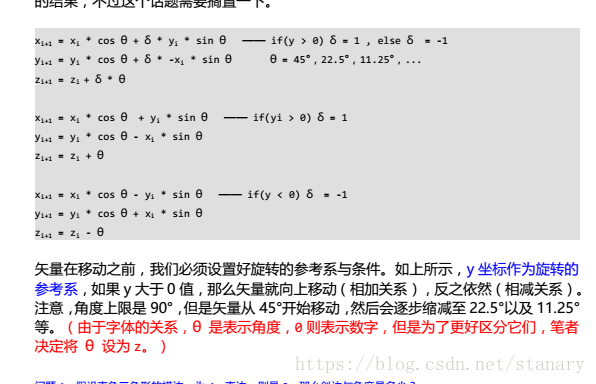
CORDIC算法有两种模式,即旋转模式和矢量模式,每一种模式都有自己的参考系。这个参考系不仅决定矢量的旋转方向,而且也间接影响坐标的加减关系。
原始公式之所以很难适用硬件实现,浮点数是原因之一,而且乘法过多也是问题。
当结尾每包含3位小数点,移动次数就要翻倍
-----------ch3------------------------------------------------
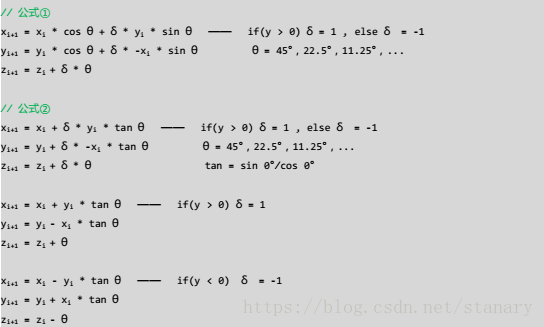
原始的公式一包含cos和sin两种函数,一旦tan函数带入进去将减少一半的的负担
矢量每次移动的距离都是上一次的一半,角度上限为90度,但矢量从45度开始向下减。
然而,公式二还是不适合硬件,所以他还要继续简化下去。问题依然是浮点数和乘法操作。
---------ch4----------------------------------------------------
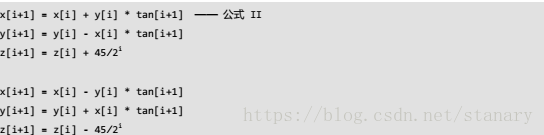
继续简化
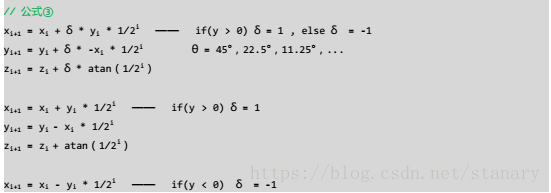
公式三在公式二的基础上,将tan函数反转再反转,结果成了更精简的公式。他和前边的家伙并没有什么两样,但他更直观,更适合硬件实现。这就是CORDIC算法的最终形态