Apollo代码学习(一)—控制模块概述
Apollo代码学习—控制模块概述
- 补充
- 2018.11.08更新
- 2018.11.15更新
- 2018.11.20更新
- 前言
- 控制
- 纵向控制
- 标定表的生成
- 横向控制
- 控制信号
- 仿真
- 仿真平台及工具
Apollo(阿波罗)是一个开放的、完整的、安全的自动驾驶平台,以灵活和高性能的技术架构,为全自动驾驶提供支持。
补充
2018.11.08更新
仿真平台的搭建请参考我的另一篇博文:
Apollo代码学习(四)—Windows下编译Apollo并与Carsim和Simulink联调
需要了解车辆运动学模型和动力学模型,可以参考我的另两篇博文:
【1】 Apollo代码学习(二)—车辆运动学模型
【2】 Apollo代码学习(三)—车辆动力学模型
横纵向控制详解可看:
Apollo代码学习(五)—横纵向控制
2018.11.15更新
对标定表的生成进行了补充。
2018.11.20更新
MPC解析可看:
Apollo代码学习(六)—模型预测控制(MPC)
前言
本人出于工作需要,对Apollo的Control模块及其相关的部分代码进行了解析。Apollo的控制逻辑主要源于此书:Vehicle Dynamics and Control,因此,研究Apollo控制代码前请先准备一下这本书,结合此书去理解Control模块的相关代码会事半功倍。此外,还需要对Frenet坐标系有一定的了解,可参考这篇文章:Optimal trajectory generation for dynamic street scenarios in a Frenét Frame。
提倡大家支持正版资源,本人提供文档仅限交流学习使用,侵删:
【1】Rajamani R. Vehicle Dynamics and Control[M]. Springer Science, 2006. | CSDN资源
【2】Optimal Trajectory Generation for Dynamic Street Scenarios in a Frenet Frame | CSDN资源
控制
研究控制前,先了解一下Apollo项目的整体结构,如下图所示,它包含了感知、定位、决策、控制、通信等几大模块。

其中,Apollo Control模块提供了三种控制方法:纵向控制、横向控制和MPC控制。本文主要介绍纵向控制和横向控制,横纵向控制详解请见我的另一篇博文:Apollo代码学习(五)—横纵向控制。
纵向控制
纵向控制主要通过控制汽车的刹车/油门来实现对汽车速度的控制。它主要由一个级联控制器和一个标定表构成。
级联控制器由位置PID闭环控制器和速度PID闭环控制器构成;
标定表是指速度-加速度-刹车/油门命令标定表。
计算纵向控制命令的接口:
Status LonController::ComputeControlCommand(
const localization::LocalizationEstimate *localization,
const canbus::Chassis *chassis,
const planning::ADCTrajectory *planning_published_trajectory,
control::ControlCommand *cmd)
输入为:定位信息(localization)、自车底盘信息(chassis)、规划信息(planning_published_trajectory)
输出为:油门/刹车命令(cmd)
Apollo纵向控制的工作原理框图如下所示:

位置PID闭环控制器
| 模块 | 变量 |
|---|---|
| 输入 | 期望位置+当前实际位置 |
| 输出 | 速度补偿量 |
速度PID闭环控制器
| 模块 | 变量 |
|---|---|
| 输入 | 速度补偿+当前位置速度偏差 |
| 输出 | 加速度补偿量 |
速度-加速度-刹车/油门命令标定表
| 模块 | 变量 |
|---|---|
| 输入 | 加速度补偿+规划加速度,车速 |
| 输出 | 油门/刹车控制量 |
纵向控制中理解起来较为复杂的是纵向误差的计算:
void LonController::ComputeLongitudinalErrors(
const TrajectoryAnalyzer *trajectory_analyzer, const double preview_time,
SimpleLongitudinalDebug *debug)
涉及到Frenet坐标系1

标定表的生成
标定表的更新请参考文档:
Apollo/docs/howto/how_to_update_vehicle_calibration.md
标定流程大致如下图所示:

其中,命令集可自定义。因为本人是在Windows下利用carsim和matlab进行仿真的,所以采集数据的过程和文档有出入,但处理和转化过程相同。
由于我搭建的是基于泊车场景的模型,对车速要求较低,因此带速下的车速完全够用,再适当加一点刹车即可,因此标定的时候没有标定油门值,标定流程大致如下:
1.首先,搭建CarSim和Smulink模型,CarSim中让汽车在带速下走直线,同时给出一定的刹车值,使车辆模型伴随一定的刹车值(0~1)进行带速行驶,判断哪些刹车值状态下,车辆可以进行加速运动;然后让车加速到带速状态下最大速度,给刹车值,测试多大刹车值下可使车辆在最高速情况下停止;
对于我来说,我测定并需要标定的值如下(m文件):
% 倒车刹车标定。车辆靠带速行驶,通过控制刹车压力,控制车辆加/减速
% 加速阶段刹车压力范围:0:0.05:0.6 acc
% 减速阶段刹车压力范围:0.6:0.05:1.6 dec
% 一个加速度值对应多个减速度值,共312组数据
if(brakeflag==0)
k=1;
acc=0:0.05:0.6;
dec=0.6:0.05:1.6;
rows=size(acc,2);
nols=size(dec,2);
des_brake=cell(1,rows*nols);
for i=1:1:rows
for j=1:1:nols
des_brake{k}=[acc(i),dec(j)];
k=k+1;
end
end
end
2.确定标定序列后(采样间隔自定,因为后期是后标定表时候需要插值计算,间隔越小相对来说插值越准确),按照一定间隔(我设置的采样周期为20s,加速12s,减速8s)在Simulink中采集CarSim传输过来的数据(主要为时间、速度、加速度)并按照Apollo采集数据的格式存入.csv文件中;
我的采样时间定义如下:
% 0s,将trajectory、count_num、saveFileflag、speedflag重置
% 0~2s,静止状态,刹车压力为2
% 3~12s,加速阶段,刹车压力:0~0.6
% 12~20s,减速阶段,刹车压力:0.6~1.6,当18s时存文件
% >20s,开始下一个文件采样
是按照Apollo的采样样式定义的,以标定工具中的文件t20b13.txt为例
a: gear_location = chassis_pb2.Chassis.GEAR_DRIVE //档位状态
a: brake = 40.0 //刹车百分比
a: steering_target = 0.0 //方向盘角度
a: throttle = 0.0 //油门百分比
c: vehicle_speed == 0.0 //车速
t: 2.0 //启动时间,静止2s后启动
a: brake = 0.0 //刹车百分比
a: throttle = 20.0 //油门百分比,开始加速
c: vehicle_speed >= 10.0 //判断车速,若车速达到10km/h,停止加速
a: throttle = 0.0 //油门百分比
t: 1.0 //匀速行驶1s
a: brake = 13.0 //刹车百分比,然后开始减速
c: vehicle_speed == 0.0 //减速至车速为0,采样结束
3.然后调用python文件进行数据处理与转换,需要针对自己的数据对部分python文件进行更改。
横向控制
横向控制主要通过调节方向盘转角来实现对航向的控制。它主要由一个前馈控制器和反馈控制器组成。横向控制器的核心是车辆动力学模型与LQR模型。
计算纵向控制命令的接口:
Status LatController::ComputeControlCommand(
const localization::LocalizationEstimate *localization,
const canbus::Chassis *chassis,
const planning::ADCTrajectory *planning_published_trajectory,
control::ControlCommand *cmd)
输入为:定位信息(localization)、自车底盘信息(chassis)、规划信息(planning_published_trajectory)
输出为:方向盘控制量(cmd)
Apollo横向控制的工作原理框图如下所示:
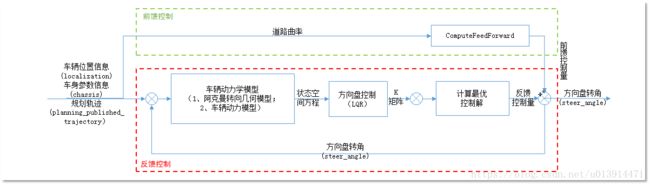
前馈控制器
| 模块 | 变量 |
|---|---|
| 输入 | 道路曲率 |
| 输出 | 方向盘前馈控制量 |
前馈控制量为了补偿道路曲率对稳态误差的影响,实现零稳态误差。主要依据参考书2中第3.2节的公式3.12。
δ f f = L R + K V a y − k 3 [ ℓ r R − ℓ f 2 C α r m V x 2 R ℓ ] \delta_{ff}=\frac{L}{R}+K_Va_y-k_3[\frac{\ell_r}{R}-\frac{\ell_f}{2C_{\alpha r}}\frac{m{V_x}^2}{R\ell}] δff=RL+KVay−k3[Rℓr−2CαrℓfRℓmVx2]
反馈控制器
| 模块 | 变量 |
|---|---|
| 输入 | 期望航向角 |
| 输出 | 方向盘反馈控制量 |
闭环控制器的主要公式为,详见参考书2中第2章关于横向控制的描述,重点关注公式2.31、2.45、2.46:
d d t [ e 1 e 1 ˙ e 2 e 2 ˙ ] = [ 0 1 0 0 0 − 2 C a f + 2 C a r m V x 2 C a f + 2 C a r m − 2 C a f ℓ f + 2 C a r ℓ r m V x 0 0 0 1 0 − − 2 C a f ℓ f − 2 C a r ℓ r I z V x 2 C a f ℓ f − 2 C a r ℓ r I z − 2 C a f ℓ f 2 + 2 C a r ℓ r 2 I z V x ] [ e 1 e 1 ˙ e 2 e 2 ˙ ] + [ 0 2 C a f m 0 2 C a f ℓ f I z ] δ + [ 0 − 2 C a f ℓ f − 2 C a r ℓ r m V x − V x 0 − 2 C a f ℓ f 2 + 2 C a r ℓ r 2 I z V x ] ψ ˙ d e s \frac{d}{dt} \begin{bmatrix} e_1 \\ \dot{e1} \\ e_2 \\ \dot{e2} \\ \end{bmatrix} = \begin{bmatrix} 0 & 1 & 0 & 0 \\ 0 & -\frac{2C_{af}+2C_{ar}}{mV_x} & \frac{2C_{af}+2C_{ar}}{m} & \frac{-2C_{af}\ell_f+2C_{ar}\ell_r}{mV_x} \\ 0 & 0 & 0 & 1 \\ 0 & -\frac{-2C_{af}\ell_f-2C_{ar}\ell_r}{I_zV_x} & \frac{2C_{af}\ell_f-2C_{ar}\ell_r}{I_z} & -\frac{2C_{af}\ell_f^2+2C_{ar}\ell_r^2}{I_zV_x} \\ \end{bmatrix} \begin{bmatrix} e_1 \\ \dot{e1} \\ e_2 \\ \dot{e2} \\ \end{bmatrix} \\ +\begin{bmatrix} 0 \\ \frac{2C_{af}}{m} \\ 0 \\ \frac{2C_{af}\ell_f}{I_z} \\ \end{bmatrix}\delta + \begin{bmatrix} 0 \\ -\frac{2C_{af}\ell_f-2C_{ar}\ell_r}{mV_x}-V_x \\ 0 \\ -\frac{2C_{af}\ell_f^2+2C_{ar}\ell_r^2}{I_zV_x} \\ \end{bmatrix}\dot{\psi}_{des} dtd⎣⎢⎢⎡e1e1˙e2e2˙⎦⎥⎥⎤=⎣⎢⎢⎢⎡00001−mVx2Caf+2Car0−IzVx−2Cafℓf−2Carℓr0m2Caf+2Car0Iz2Cafℓf−2Carℓr0mVx−2Cafℓf+2Carℓr1−IzVx2Cafℓf2+2Carℓr2⎦⎥⎥⎥⎤⎣⎢⎢⎡e1e1˙e2e2˙⎦⎥⎥⎤+⎣⎢⎢⎡0m2Caf0Iz2Cafℓf⎦⎥⎥⎤δ+⎣⎢⎢⎢⎡0−mVx2Cafℓf−2Carℓr−Vx0−IzVx2Cafℓf2+2Carℓr2⎦⎥⎥⎥⎤ψ˙des
闭环控制主要结合车辆动力学模型得出状态矩阵,然后利用LQR模型获取K矩阵,进而计算最优控制解steer_angle_feedback,它的实现过程如下:
a、依据阿克曼转角几何和车辆动力学原理,搭建车辆动力学模型,列写状态空间方程;
b、根据已知车辆信息,计算横向偏差,更新状态矩阵、状态矩阵系数、控制矩阵系数等;
更新状态矩阵,代码对应接口:
void LatController::UpdateStateAnalyticalMatching(SimpleLateralDebug *debug)
输入:debug,包含横向误差、航向误差等信息
输出:更新状态矩阵
计算横向误差,代码对应接口:
double LatController::ComputeLateralErrors(
const double x,
const double y,
const double theta,
const double linear_v,
const double angular_v,
const TrajectoryAnalyzer &trajectory_analyzer,
SimpleLateralDebug *debug)
输入:当前车辆位置坐标(x, y)、当前航向角theta、当前线速度linear_v、当前角速度angular_v、规划轨迹trajectory_analyzer
输出:debug信息,主要为生成状态矩阵,状态矩阵包含:lateral_error、lateral_error_rate、heading_error、heading_error_rate四个元素
更新状态矩阵系数matrix_a_和离散状态矩阵系数matrix_ad_,代码对应接口:
void LatController::UpdateMatrix()
更新混合状态矩阵系数matrix_adc_和混合控制矩阵系数matrix_bdc_,代码对应接口:
void LatController::UpdateMatrixCompound()
c、计算K矩阵;
代码对应接口:
void common::math::SolveLQRProblem(
const Matrix &A,
const Matrix &B,
const Matrix &Q,
const Matrix &R,
const double tolerance,
const uint max_num_iteration,
Matrix *ptr_K)
输入:状态矩阵系数A、控制矩阵系数B、控制权重矩阵R、状态权重矩阵Q、迭代次数max_num_iteration、计算阈值tolerance
输出:增益矩阵ptr_K
d、计算最优控制解。
const double steer_angle_feedback = -(matrix_k_ * matrix_state_)(0, 0) * 180 /
M_PI * steer_transmission_ratio_ /
steer_single_direction_max_degree_ * 100;
反馈量:steer_angle = steer_angle_feedback + steer_angle_feedforward,即为方向盘控制量。
控制信号
Apollo中Control模块计算完cmd后按周期发送给canbus模块,再由canbus模块发送给CANBUS,并定期从canbus模块接收相关信息。
Apollo can信号采用DBC格式,

了解消息收发请查看如下相关代码:
Apollo\modules\canbus\canbus.cc
Apollo\modules\canbus\vehicle\lincoln\protocol
Apollo\modules\canbus\vehicle\lincoln\lincoln_controller.cc
Apollo\modules\drivers\canbus\can_comm\message_manager.h
Apollo\modules\drivers\canbus\can_comm\can_receiver.h
Apollo\modules\drivers\canbus\can_comm\protocol_data.h
消息分为接收和发送,不同消息对应不同ID,对于同一类型消息,接收和发送使用不同的消息ID,具体如下:
接收模块
| 信号 | 发送周期 | 发送 | 接收 |
|---|---|---|---|
| brake_61 | 10ms | can_client_ | Apollo_module |
| throttle_63 | 10ms | can_client_ | Apollo_module |
| steering_65 | 10ms | can_client_ | Apollo_module |
| gear_67 | 10ms | can_client_ | Apollo_module |
| misc_69 | 10ms | can_client_ | Apollo_module |
| wheelspeed_6a | 10ms | can_client_ | Apollo_module |
| accel_6b | 10ms | can_client_ | Apollo_module |
| gyro_6c | 10ms | can_client_ | Apollo_module |
| gps_6d | 10ms | can_client_ | Apollo_module |
| gps_6e | 10ms | can_client_ | Apollo_module |
| gps_6f | 10ms | can_client_ | Apollo_module |
| tirepressure_71 | 10ms | can_client_ | Apollo_module |
| fullevel_72 | 10ms | can_client_ | Apollo_module |
| surround_73 | 10ms | can_client_ | Apollo_module |
| brakeinfo_74 | 10ms | can_client_ | Apollo_module |
| throttleinfo_75 | 10ms | can_client_ | Apollo_module |
| version_7f | 10ms | can_client_ | Apollo_module |
| license_7e | 10ms | can_client_ | Apollo_module |
发送模块
| 信号 | 发送周期 | 发送 | 接收 |
|---|---|---|---|
| brake_60 | 20ms | can_client_ | CANBUS |
| throttle_62 | 20ms | can_client_ | CANBUS |
| steering_64 | 20ms | can_client_ | CANBUS |
| gear_66 | 20ms | can_client_ | CANBUS |
| turnsignal_68 | 50ms | can_client_ | CANBUS |
仿真
仿真平台及工具
仿真平台Windows
仿真工具CarSim + Simulink
本人并未在Apollo团队预定义的Docker环境中搭建Apollo,而是在同事的协助下抽调了Apollo里的纵向控制代码及部分编译依赖库,在Windows下利用CarSim搭建车模型,Matlab Simulink提供规划路径和控制逻辑实现了自动泊车的仿真。


Werling M, Ziegler J, Kammel S, et al. Optimal trajectory generation for dynamic street scenarios in a Frenét Frame[C]// IEEE International Conference on Robotics and Automation. IEEE, 2010:987-993. ↩︎
Rajamani R. Vehicle Dynamics and Control[M]. Springer Science, 2006. ↩︎ ↩︎