模型预测控制系列讲解(一):抛砖引玉(自动驾驶车辆纵向控制实例)
模型预测控制系列讲解(一):抛砖引玉(自动驾驶车辆纵向控制实例)
- 1.说明
- 2.模型预测控制实现
- 2.1预测模型构建
- 2.2性能指标要求及设计
- 2.3根据性能指标要求重构预测模型
- 2.4根据预测模型预测Np时域内系统输出
- 2.5约束条件设计
- 2.6整理化简性能指标为标准二次规划形式
- 3.仿真结果
- 4.总结
- 5.S_Function代码(后续会更新C/C++代码)
- 补充1:性能指标转化成标准二次规划推导过程(手动推导)
- 补充2:性能指标转化成标准二次规划推导过程(公式编辑)
1.说明
首先通过一个简单的基于恒加速度(CA)车辆运动学模型MPC控制算法,引出模型预测控制,可以对模型预测控制有提个初步的感性的认知,具体模型预测控制思想,实现方式,实现步骤,定量分析,定性分析,性能指标设计以及参数整定等等后续会持续更新相关内容,可以先按照该篇模型先行仿真,感受模型预测控制。
2.模型预测控制实现
2.1预测模型构建
恒加速度(CA)模型(高中物理),已经离散化后的线性模型:

其中:
v k \ v_k vk 为 k k k时刻车辆速度,
v k + 1 \ v_{k+1} vk+1为 k + 1 k+1 k+1时刻车辆速度,
a k \ a_k ak 为 k k k 时刻车辆加速度,
d k \ d_k dk 为 k k k 时刻车辆位置,
d k + 1 \ d_{k+1} dk+1为 k + 1 k+1 k+1时刻车辆位置,
T \ T T 为 采样时间。
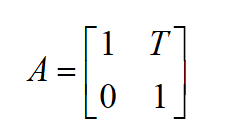
将上述模型写成矩阵形式:
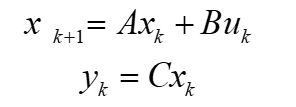
其中:
x k = [ d k , v k ] T \ x_k=[d_k,v_k]^T xk=[dk,vk]T,为状态向量,
u k = a k \ u_k=a_k uk=ak,为控制量,
y k = [ d k , v k ] T \ y_k=[d_k,v_k]^T yk=[dk,vk]T,为输出向量,
A , B , C \ A,B,C A,B,C分别为状态矩阵,控制矩阵,输出矩阵。
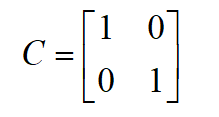
由上述模型可以求得A,B,C:

2.2性能指标要求及设计
在设计性能指标的时候考虑因素:
1.输出与期望偏差尽可能小,反映系统跟随能力
2.尽量对控制量的突变情况进行约束,所以采用控制增量来约束
具体性能指标形式如下:
J ( k ) = ∑ i = 1 N p ∣ ∣ y r e a l ( k + i / k ) − y d e s ( k + i / k ) ∣ ∣ Q _ b a s e 2 + ∑ i = 0 N c − 1 ∣ ∣ Δ u ( k + i / k ) ∣ ∣ R _ b a s e 2 \ J(k) = \sum_{i =1}^{Np}||y_{real}{(k+i/k)}-y_{des}{(k+i/k)}||^2_{Q\_{base}}+\sum_{i=0}^{Nc-1}||\Delta u{(k+i/k)}||_{R\_{base}}^2 J(k)=∑i=1Np∣∣yreal(k+i/k)−ydes(k+i/k)∣∣Q_base2+∑i=0Nc−1∣∣Δu(k+i/k)∣∣R_base2
性能指标的选取与实际需求有着非常紧密的联系,通常会先选择性能指标,再根据性能指标来决定预测模型的选取或者建立。
2.3根据性能指标要求重构预测模型
根据性能指标,将预测模型重构成含有控制增量的方式,重构方法:待定系数法,具体形式如下:
ξ k + 1 = A t r a n ξ k + B t r a n Δ u k y k = C t r a n ξ k \xi_{k+1}=A_{tran}\xi_{k}+B_{tran}\Delta u_{k}\\y_{k}=C_{tran}\xi_{k} ξk+1=Atranξk+BtranΔukyk=Ctranξk
Δ u k = u k − u k − 1 \Delta u_{k} = u_{k}-u_{k-1} Δuk=uk−uk−1;
ξ k = [ d k , v k , a k − 1 ] T \xi_k=[d_k,v_k,a_{k-1}]^T ξk=[dk,vk,ak−1]T;
可以求得 A t r a n A_{tran} Atran, B t r a n B_{tran} Btran, C t r a n C_{tran} Ctran
A t r a n = [ 1 , T , T 2 / 2 ; 0 , 1 , T ; 0 , 0 , 1 ] A_{tran} =[1,T,T^2/2;0,1,T;0,0,1] Atran=[1,T,T2/2;0,1,T;0,0,1];
B t r a n = [ T 2 / 2 ; T ; 1 ] B_{tran}=[T^2/2;T;1] Btran=[T2/2;T;1];
C t r a n = [ 1 , 0 , 0 ; 0 , 1 , 0 ] C_{tran}=[1,0,0;0,1,0] Ctran=[1,0,0;0,1,0];
性能指标可以写的更紧凑:
J ( k ) = ∣ ∣ Y ( t ) − Y d e s ( t ) ∣ ∣ Q 2 + ∣ ∣ Δ u ( t ) ∣ ∣ R 2 J(k) = ||Y(t)-Y_{des}(t)||_Q^2+||\Delta u(t)||_R^2 J(k)=∣∣Y(t)−Ydes(t)∣∣Q2+∣∣Δu(t)∣∣R2
其中:
Y ( t ) = [ y ( k + 1 / k ) , y ( k + 2 / k ) , . . . , y ( k + N p / k ) ] T Y(t)=[y_(k+1/k),y(k+2/k), ... ,y(k+Np/k)]^T Y(t)=[y(k+1/k),y(k+2/k),...,y(k+Np/k)]T;
Y d e s ( t ) = [ y d e s ( k + 1 / k ) , y d e s ( k + 2 / k ) , . . . , y d e s ( k + N p / k ) ] T Y_{des}(t)=[y_{des}(k+1/k),y_{des}(k+2/k), ... ,y_{des}(k+Np/k)]^T Ydes(t)=[ydes(k+1/k),ydes(k+2/k),...,ydes(k+Np/k)]T;
Δ u ( t ) = [ Δ u ( k ) , Δ u ( k + 1 ) , . . . , Δ u ( k + N c − 1 ) ] T \Delta u(t)=[\Delta u(k),\Delta u(k+1), ... ,\Delta u(k+Nc-1)]^T Δu(t)=[Δu(k),Δu(k+1),...,Δu(k+Nc−1)]T;
Q Q Q的对角线上的元素为 Q b a s e ( k + 1 ) , Q b a s e ( k + 2 ) , . . . Q b a s e ( k + N p ) Q_{base}(k+1),Q_{base}(k+2), ... Q_{base}(k+Np) Qbase(k+1),Qbase(k+2),...Qbase(k+Np)
R R R的对角线上的元素为 R b a s e ( k ) , R b a s e ( k + 1 ) , . . . , R b a s e ( k + N c − 1 ) R_{base}(k),R_{base}(k+1), ... ,R_{base}(k+Nc-1) Rbase(k),Rbase(k+1),...,Rbase(k+Nc−1);
具体实现大家可以亲自推导一遍,在推导过程用分块矩阵去做,以预测时域和控制时域来分块,便于推导和理解。
2.4根据预测模型预测Np时域内系统输出
预测时域Np内的系统输出可以在当前状态下通过预测模型得到,并且只与当前状态 x ( k ) x(k) x(k)和未来控制时域Nc的控制量 u ( k ) , u ( k + 1 ) , . . . , u ( k + N c − 1 ) u(k),u(k+1),...,u(k+Nc-1) u(k),u(k+1),...,u(k+Nc−1)有关,而未来Nc时域的控制量又可以由前一时刻的控制量 u ( k − 1 ) u(k-1) u(k−1)和 Δ u ( k ) , Δ u ( k + 1 ) , . . . , Δ u ( k + N c − 1 ) \Delta u(k),\Delta u(k+1),...,\Delta u(k+Nc-1) Δu(k),Δu(k+1),...,Δu(k+Nc−1)来计算的来,具体推导大家可以亲手试着推导一遍,更容易理解其中的变换过程,这里就不再进行推导。
用紧凑型来表示:
Y ( t ) = Φ ξ k + Θ Δ u ( t ) Y(t)=\Phi \xi_k+\Theta\Delta u(t) Y(t)=Φξk+ΘΔu(t)
其中, Y ( t ) , ξ k , Δ u ( t ) Y(t),\xi_k,\Delta u(t) Y(t),ξk,Δu(t)上面已经列出,重点是 Φ , Θ \Phi,\Theta Φ,Θ的计算,可以选取Np和Nc都小一点,推导一下,规律很好找,由于公式编辑是在太过耗时,这里不再展开,大家可以在代码中看到具体形式,或者参考北理工出版的《无人驾驶车辆模型预测控制》。
2.5约束条件设计
约束条件,根据被控量物理属性,控制过程的舒适性等等来设计,具体如何设计会在后续详细分一章节来展开。
首先,对控制量的约束:
u m i n ( t ) < = u ( t ) < = u m a x ( t ) u_{min}(t)<= u(t)<=u_{max}(t) umin(t)<=u(t)<=umax(t)
u ( t ) = [ u ( k ) , u ( k + 1 ) , . . . , u ( k + N c − 1 ) ] T u(t)=[u(k),u(k+1), ... ,u(k+Nc-1)]^T u(t)=[u(k),u(k+1),...,u(k+Nc−1)]T;
再次,对控制增量的约束:
Δ u m i n ( t ) < = Δ u ( t ) < = Δ u m a x ( t ) \Delta u_{min}(t)<= \Delta u(t)<=\Delta u_{max}(t) Δumin(t)<=Δu(t)<=Δumax(t)
Δ u ( t ) = [ Δ u ( k ) , Δ u ( k + 1 ) , . . . , Δ u ( k + N c − 1 ) ] T \Delta u(t)=[\Delta u(k),\Delta u(k+1), ... ,\Delta u(k+Nc-1)]^T Δu(t)=[Δu(k),Δu(k+1),...,Δu(k+Nc−1)]T;
具体限制值代码中会给出,由于求解变量为控制增量,所以需要将约束条件转换成只含有控制增量的表达式:
Δ U m i n ( t ) < = Δ U ( t ) < = Δ U m a x ( t ) U m i n ( t ) < = A c Δ U ( t ) + U ( k − 1 ) < = U m a x ( t ) \Delta U_{min}(t)<=\Delta U(t)<=\Delta U_{max}(t)\\U_{min}(t)<=A_{c}\Delta U(t)+U(k-1)<=U_{max}(t) ΔUmin(t)<=ΔU(t)<=ΔUmax(t)Umin(t)<=AcΔU(t)+U(k−1)<=Umax(t)
其中所有含有大写U都是Nc控制时域内的对应值,都是Nc*size(u)的列向量
U ( k − 1 ) U(k-1) U(k−1)为Nc长度的列向量与 u ( k − 1 ) u(k-1) u(k−1)的克罗内克积,
A c A_c Ac为下三角元素全为1, N c ∗ N c Nc * Nc Nc∗Nc的对角矩阵与 I N u I_{Nu} INu的克罗内克积。
A c Δ U ( t ) + U ( k − 1 ) A_{c}\Delta U(t)+U(k-1) AcΔU(t)+U(k−1)目的就是由未来Nc个时刻的控制增量和上一时刻的控制量来计算未来Nc个时刻的控制量。
2.6整理化简性能指标为标准二次规划形式
就是将前面的性能指标通过矩阵的性质,化简为标准的二次规划形式,就可以使用quadprog来求解,大家可以通过matlab的帮助文档来获得二次规划函数quadprog的实际使用方法,以及参数传递,文档中会有标准二次规划的说明。
% 性能指标转化为标准二次规划系数矩阵
H = Theta' * Q * Theta + R;
H = (H + H')/2;
f = (2*(Phi * kesi - y_ref)' * Q * Theta)';这里是转换结果,推导过程大家可以体验一下,后续我会把手动推导的过程以图片的形式贴上来。
3.仿真结果
仿真的数据输入是根据CA(横加速度)模型,根据采样时间,以一个恒定的加速度来计算出期望速度和期望位置,给入模型预测控制,简单的仿真曲线,大概可以反应控制效果,具体可以修改其中的权值,预测时域以及控制时域来优化控制效果。
速度跟随曲线:

位置跟随曲线:
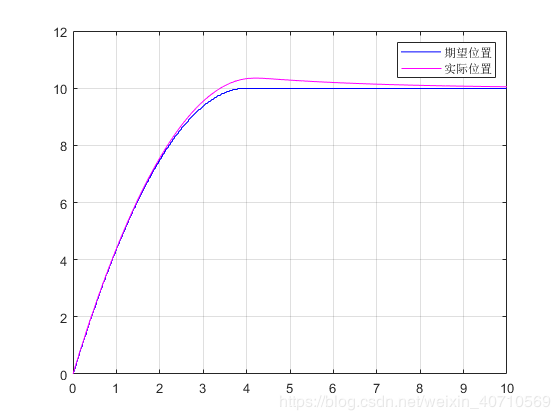
如果输入期望值直接给入阶跃值,效果又如何?造成这样的原因是什么,在不改变期望输入的情况下,怎么解决?我会在接下来的更新过程中说明一些解决方案。这也是需要加速度规划和不需要加速度规划的问题,其实这两种情况我们实际应用中是都会遇到的,之后我会详细为大家说明。
4.总结
这个只是使用非常简单的预测模型,没有太多复杂处理,只用来大家体验下模型预测控制的实现,对MPC有一个初步的认知。
接下来会展开来讲模型预测控制的相关原理,思想方式,不同的实现方式,简单的稳定性分析,定量以及定性的分析等等。会在后续介绍中,介绍已经经过RCP(快速原型)验证的基于MPC的ACC(自适应巡航)控制算法,详细介绍性能指标的选取,参数的调节等等。
5.S_Function代码(后续会更新C/C++代码)
下面附MPC的S_Function代码:
该代码是在Matlab2018b中开发
function MPC_long_control(block)
% Level-2 MATLAB file S-Function
% 基于恒加速度汽车纵向模型的模型预测控制
setup(block);
% endfunction
function setup(block)
% Register number of ports
block.NumInputPorts = 4;
block.NumOutputPorts = 2;
% setup port properties to be inherited or dynamic
block.SetPreCompInpPortInfoToDynamic;
block.SetPreCompOutPortInfoToDynamic;
% Override input port properties
block.InputPort(1).Dimensions = 1;
block.InputPort(1).DatatypeID = 0; % double
block.InputPort(1).Complexity = 'Real';
block.InputPort(1).DirectFeedthrough = false;
block.InputPort(1).SamplingMode = 'Sample';
block.InputPort(2).Dimensions = 1;
block.InputPort(2).DatatypeID = 0; % double
block.InputPort(2).Complexity = 'Real';
block.InputPort(2).DirectFeedthrough = false;
block.InputPort(2).SamplingMode = 'Sample';
block.InputPort(3).Dimensions = 1;
block.InputPort(3).DatatypeID = 0; % double
block.InputPort(3).Complexity = 'Real';
block.InputPort(3).DirectFeedthrough = false;
block.InputPort(3).SamplingMode = 'Sample';
block.InputPort(4).Dimensions = 1;
block.InputPort(4).DatatypeID = 0; % double
block.InputPort(4).Complexity = 'Real';
block.InputPort(4).DirectFeedthrough = false;
block.InputPort(4).SamplingMode = 'Sample';
% Override output port properties
block.OutputPort(1).Dimensions = 1;
block.OutputPort(1).DatatypeID = 0; % double
block.OutputPort(1).Complexity = 'Real';
block.OutputPort(1).SamplingMode = 'Sample';
block.OutputPort(2).Dimensions = [1,2];
block.OutputPort(2).DatatypeID = 0; % double
block.OutputPort(2).Complexity = 'Real';
block.OutputPort(2).SamplingMode = 'Sample';
% Register parameters
block.NumDialogPrms = 2;
block.DialogPrmsTunable = {'Tunable','Tunable'};
block.SampleTimes = [-1,0];
block.SimStateCompliance = 'DefaultSimState';
block.RegBlockMethod('PostPropagationSetup', @DoPostPropSetup);
block.RegBlockMethod('InitializeConditions', @InitializeConditions);
block.RegBlockMethod('Outputs', @Outputs);
block.RegBlockMethod('Update', @Update);
% end setup
function DoPostPropSetup(block)
% 系统状态变量设置
% 状态变量个数设置
block.NumDworks = 2;
block.Dwork(1).Name = 'd_rel';
block.Dwork(1).Dimensions = 1;
block.Dwork(1).DatatypeId = 0; %double
block.Dwork(1).Complexity = 'Real';
block.Dwork(1).UsedAsDiscState = true;
block.Dwork(2).Name = 'v_rel';
block.Dwork(2).Dimensions = 1;
block.Dwork(2).DatatypeId = 0; %double
block.Dwork(2).Complexity = 'Real';
block.Dwork(2).UsedAsDiscState = true;
% end DoPostPropSetup
function InitializeConditions(block)
% 初始化设置
global U; % 控制量
U = 0;
block.Dwork(1).Data = block.DialogPrm(1).Data;
block.Dwork(2).Data = block.DialogPrm(2).Data;
% end InitializeConditions
function Outputs(block)
% 输出函数
global U;
Ts = 0.01; % 采样周期
Np = 50; % 预测时域
Nc = 50; % 控制时域
Row = 10; % 松弛因子
Nx = 2; % 状态量个数
Nu = 1; % 控制量个数
No = 2; % 输出量个数
% 控制期望值计算以及转换
y_des = [block.InputPort(1).Data, block.InputPort(2).Data]'; % 期望输出向量
y_ref = kron(ones(Np, 1), y_des); % 预测时域内各时刻期望输出
% 预测状态方程状态向量计算
vector_x = [block.Dwork(1).Data, block.Dwork(2).Data]'; % 原始状态方程状态向量
Kesi_cell = cell(2, 1);
Kesi_cell{1,1} = vector_x;
Kesi_cell{2,1} = U;
kesi = cell2mat(Kesi_cell); % 预测状态方程状态向量
% 初始状态方程矩阵以及输出矩阵
A = [1,Ts;0,1];
B = [(Ts^2)/2,Ts]';
C = eye(2);
% 变换后状态方程系数矩阵
A_tran_cell = cell(2,2);
B_tran_cell = cell(2,1);
C_tran_cell = cell(1,2);
A_tran_cell{1,1} = A;
A_tran_cell{1,2} = B;
A_tran_cell{2,1} = zeros(Nu,Nx);
A_tran_cell{2,2} = eye(Nu);
B_tran_cell{1,1} = B;
B_tran_cell{2,1} = eye(Nu);
C_tran_cell{1,1} = C;
C_tran_cell{1,2} = zeros(No,1);
A_tran = cell2mat(A_tran_cell);
B_tran = cell2mat(B_tran_cell);
C_tran = cell2mat(C_tran_cell);
% 系统预测输出系数矩阵
Phi_cell = cell(Np,1);
Theta_cell = cell(Np,Nc);
for i = 1:Np
Phi_cell{i,1} = C_tran*(A_tran^i);
for j = 1:Nc
if j <= i
Theta_cell{i,j} = C_tran*A_tran^(i-j)*B_tran;
else
Theta_cell{i,j} = zeros(No,Nu);
end
end
end
Phi = cell2mat(Phi_cell);
Theta = cell2mat(Theta_cell);
% 性能指标权系数矩阵
Q_base = [1,0;0,1]; % No*No的对角矩阵,输出误差基准加权矩阵
R_base = 1; % Nu*Nu的对角矩阵,控制量加权基准矩阵,此处为控制增量加权基准矩阵
Q = eye(Np);
R = eye(Nc);
Q = kron(Q,Q_base); % 预测时域内输出误差权矩阵
R = kron(R,R_base); % 控制时域内控制增量权矩阵
% 性能指标转化为标准二次规划系数矩阵
H = 2 * (Theta' * Q * Theta + R);
H = (H + H')/2;
f = (2*(Phi * kesi - y_ref)' * Q * Theta)';
% 约束条件
A_c = tril(ones(Nc*Nu));
Ut = kron(ones(Nc,1),U);
umin = -5; % 控制量最大值,此处为加速度最小值
umax = 2; % 控制量最小值,此处为加速度最大值
delta_umin = -0.05; % 控制增量最小值
delta_umax = 0.05; % 控制增量最大值
U_min = kron(ones(Nc,1),umin);
U_max = kron(ones(Nc,1),umax);
delta_Umin = kron(ones(Nc,1),delta_umin);
delta_Umax = kron(ones(Nc,1),delta_umax);
lb = delta_Umin;
ub = delta_Umax;
% 不等式约束系数矩阵
A_con_cell = {A_c;-A_c};
b_con_cell = {U_max - Ut;-U_min + Ut};
A_con = cell2mat(A_con_cell);
b_con = cell2mat(b_con_cell);
% 二次规划求解
options = optimset('Algorithm','');
[X,fval,exitflag] = quadprog(H,f,A_con,b_con,[],[],lb,ub,[],options);
% 控制量计算
delta_u = X(1);
U = U + delta_u;
u_ctr = U;
block.OutputPort(1).Data = u_ctr;
block.OutputPort(2).Data = [u_ctr, delta_u];
% end Outputs
function Update(block)
% 状态更新
block.Dwork(1).Data = block.InputPort(3).Data;
block.Dwork(2).Data = block.InputPort(4).Data;
% end Updata补充1:性能指标转化成标准二次规划推导过程(手动推导)
这个推导过程看似复杂,经常在这会劝退很多人,实则掌握了它的本质,则就相对简单很多,要有一中持之以恒的信念!
性能指标: J ( k ) = ∣ ∣ Y ( t ) − Y d e s ( t ) ∣ ∣ Q 2 + ∣ ∣ Δ u ( t ) ∣ ∣ R 2 J(k) = ||Y(t)-Y_{des}(t)||_Q^2+||\Delta u(t)||_R^2 J(k)=∣∣Y(t)−Ydes(t)∣∣Q2+∣∣Δu(t)∣∣R2
输出预测方程: Y ( t ) = Φ ξ k + Θ Δ u ( t ) Y(t)=\Phi \xi_k+\Theta\Delta u(t) Y(t)=Φξk+ΘΔu(t)
标准二次规划形式:
min x 1 2 x T H x + f T x s t . { A x ⩽ b A e q ⩽ b e q l b ⩽ x ⩽ u b \begin{gathered} \min_{x}\ \frac{1}{2}{x^T}Hx+f^Tx \\ st.\begin{cases} Ax\leqslant{b}\\ Aeq\leqslant{beq}\\ lb\leqslant{x}\leqslant{ub} \end{cases} \end{gathered} xmin 21xTHx+fTxst.⎩⎪⎨⎪⎧Ax⩽bAeq⩽beqlb⩽x⩽ub
目标是将性能指标化简为标准二次规划形式。
推导过程中用到的矩阵运算性质:
{ ( A B ) T = B T A T ( A ± B ) T = A T ± B T A B C = A ( B C ) = ( A B ) C A ( B + C ) = A B + A C ( B + C ) A = B A + B C \begin{gathered} \begin{cases} (AB)^T=B^TA^T\\ (A\pm{B})^T=A^T\pm{B}^T\\ ABC = A(BC)=(AB)C\\ A(B+C)=AB+AC\\ (B+C)A=BA+BC\\ \end{cases} \end{gathered} ⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧(AB)T=BTAT(A±B)T=AT±BTABC=A(BC)=(AB)CA(B+C)=AB+AC(B+C)A=BA+BC
当A矩阵为对称矩阵或者A为一个实数,则有:
A T = A \ A^T =A AT=A
这个性质在推导过程中及其重要,尤其是它的不同表现形式,如 M = A B \ M = AB M=AB,如果我们知道M为对称矩阵或者M为实数,则会有:
M = M T = ( A B ) T = B T A T \begin{gathered} M =M^T=(AB)^T=B^TA^T \end{gathered} M=MT=(AB)T=BTAT
下面是手动推导过程:
 手动推导过程。
手动推导过程。
补充2:性能指标转化成标准二次规划推导过程(公式编辑)
这里采用公式编辑来跟清晰的展现转化过程。

其中 ( Φ ξ k ) T Q ( Φ ξ k ) (\Phi\xi_k)^TQ(\Phi\xi_k) (Φξk)TQ(Φξk)和 2 Y d e s T ( t ) Q ( Φ ξ k ) 2Y^T_{des}(t)Q(\Phi\xi_k) 2YdesT(t)Q(Φξk),不含有优化变量 Δ u ( t ) \Delta{u}(t) Δu(t),这两项可以看作是常数项,对优化不产生影响,比如要求 f ( x ) f(x) f(x)的最小值:
min x f ( x ) = f 1 ( x ) + a \begin{gathered} \min_{x}\ f(x)=f_1(x)+a \end{gathered} xmin f(x)=f1(x)+a
式中 a a a为常数项,那么 f ( x ) f(x) f(x)取的最小值的时候就是 f 1 ( x ) f_1(x) f1(x)取得最小值的时候。
所以最后的性能指标就可以简化为:
J ( k ) = Δ u T ( t ) ( Θ T Q Θ + R ) Δ u ( t ) + 2 ( Φ ξ k − Y d e s ( t ) ) T Q Θ Δ u ( t ) J(k)=\Delta{u}^T(t)(\Theta^TQ\Theta+R)\Delta{u}(t)+2(\Phi\xi_k-Y_{des}(t))^TQ\Theta\Delta{u}(t) J(k)=ΔuT(t)(ΘTQΘ+R)Δu(t)+2(Φξk−Ydes(t))TQΘΔu(t)
对照上边的标准二次规划,可以得到其系数:
H = 2 ( Θ T Q Θ + R ) f = ( 2 ( Φ ξ k − Y d e s ( t ) ) T Q Θ ) T H=2(\Theta^TQ\Theta+R)\\ f = (2(\Phi\xi_k-Y_{des}(t))^TQ\Theta)^T H=2(ΘTQΘ+R)f=(2(Φξk−Ydes(t))TQΘ)T
从而实现了从性能指标到标准二次规划的化简。