对偶四元数——使用python3实现对偶四元数的符号运算 v2.0
实现对偶四元数简单的符号运算,数值运算,2.0版本
改正了v1.0中的一些错误,添加了四元数归一化,转换为齐次变换矩阵,转换为螺旋,转换为双矢量,三种共轭等功能
可以先看最后例子的效果
目录
1 创建一个包含对偶算子的单项式类
2 创建多项式类
3 创建对偶四元数类
4 举个例子
1 创建一个包含对偶算子的单项式类
主要功能:单项式乘法,输出
monomial.py
# coding: utf-8
"""
@ Time: Created on 2019.04.07\n
@ Author: yukino\n
@ Description:Create a monomial class
"""
class Monomial:
def __init__(self, coef=0, para={}, dual=False):
self.coef = coef # 系数
self.var = para.keys() # 元
self.deg = para.values() # 次数
self.para = para # 变量
self.dual = dual # 对偶符
def __mul__(self, monomial):
"""乘法运算符重载"""
if self.dual and monomial.dual is True: # 判断是否都是对偶数
return None # 如果都是返回空
else:
result = Monomial()
result.coef = self.coef
result.para = self.para.copy()
result.coef *= monomial.coef
for k, v in monomial.para.items():
if k in result.para.keys(): # 如果元存在则次数相加
result.para[k] += v
else:
result.para[k] = v # 否则在字典中添加新键值对
result.dual = self.dual or monomial.dual # 计算对偶符
return result
def multiply(self, monomial):
result = Monomial()
result.coef = self.coef
result.para = self.para.copy()
result.coef *= monomial.coef
for k, v in monomial.para.items():
if k in result.para.keys():
result.para[k] += v
else:
result.para[k] = v
return result
def __str__(self):
"""输出重载"""
self.para = dict(sorted(self.para.items(), key=lambda x: x[0]))
term = ""
coef = approx(self.coef)
if self.para == {}: # 如果只有系数
if self.dual:
return '@(' + str(coef) + ')'
else:
return str(coef) # 只返回系数
else:
for key in self.para:
if self.para[key] == 1: # 如果次数为1则不打印幂
term += " " + (str(key))
else:
term += " " + (str(key)) + "^" + str(self.para[key])
if coef == 1.0: # 如果系数为1则不打印系数
if self.dual is True:
return "@(" + term.strip() + ")"
else:
return term.strip()
elif coef == -1.0: # 如果系数为-1则只打印符号
if self.dual is True:
return "@(-" + term.strip() + ")"
else:
return "-" + term.strip()
else:
if self.dual is True:
return "@(" + str(coef) + term.strip() + ")"
else:
return str(coef) + term.strip()
def approx(num):
e = 1e-15
num1 = round(num, 1)
if abs(num - num1) < e:
return num1
else:
return round(num, 4)
if __name__ == '__main__':
# test
a = Monomial(3, {'x': 2, 'y': 3, 'z': 4})
b = Monomial(-3, {'a': 5, 'y': 6, 'z': 7})
c = Monomial(9)
d = b * a
print(d)
2 创建多项式类
主要功能:多项式加法,减法,乘法,输出,化简等
polynomial.py
# coding: utf-8
"""
@ Time: Created on 2019.03.13\n
@ Author: yukino\n
@ Description:Create a polynomial class
"""
from monomial import Monomial
class Polynomial:
"""
多项式类
初始化参数:任意数量Monomial类
"""
def __init__(self, *monomial):
self.monomials = monomial # 单项式组成的元组
self.coefs = [i.coef for i in monomial] # 单项式系数
def __str__(self):
"""输出重载"""
term = []
if self.monomials.__len__() == 1: # 如果只有一个单项式则不打印括号
term.append(str(self.monomials[0]))
else:
for monomial in self.monomials:
if monomial not in [None]: # 如果单项式不为空
if monomial.coef < 0: # 系数小于0则加括号
term.append("(" + str(monomial) + ")")
elif monomial.coef > 0:
term.append(str(monomial))
term = ' + '.join(term)
return term
def __add__(self, polynomial):
"""加法运算符重载"""
return Polynomial(*(self.monomials + polynomial.monomials))
def __sub__(self, polynomial):
"""减法运算符重载"""
minus = []
for monomial in polynomial.monomials:
temp = Monomial()
temp.coef = -monomial.coef
temp.para = monomial.para.copy()
temp.dual = monomial.dual
minus.append(temp)
return Polynomial(* (self.monomials + tuple(minus)))
def __mul__(self, polynomial):
"""乘法运算符重载"""
mult = []
for monomialP in polynomial.monomials:
for monomialR in self.monomials:
mult.append(monomialR * monomialP)
return Polynomial(* mult)
def simplify(poly):
"""
多项式化简函数\n
Input: Polynomial Class\n
Output: Polynomial Class
"""
# 分离实部与对偶部
real = []
dual = []
for monomial in poly.monomials:
if monomial.dual is True:
dual.append(monomial)
else:
real.append(monomial)
# 简化实部
resparas = []
rescoefs = []
monomials = []
paras = [monomial.para for monomial in real]
coefs = [monomial.coef for monomial in real]
for i in range(len(paras)):
if not paras[i] in resparas:
resparas.append(paras[i])
rescoefs.append(coefs[i])
else:
rescoefs[resparas.index(paras[i])] += coefs[i]
for i in range(len(rescoefs)):
monomials.append(Monomial(rescoefs[i], resparas[i]))
# 简化对偶部
resparas = []
rescoefs = []
paras = [monomial.para for monomial in dual]
coefs = [monomial.coef for monomial in dual]
for i in range(len(paras)):
if not paras[i] in resparas:
resparas.append(paras[i])
rescoefs.append(coefs[i])
else:
rescoefs[resparas.index(paras[i])] += coefs[i]
for i in range(len(rescoefs)):
monomials.append(Monomial(rescoefs[i], resparas[i], True))
simp = Polynomial(*monomials)
return simp
if __name__ == '__main__':
# test
a = Monomial(3, {'x': 2, 'y': 3, 'z': 4}, True)
b = Monomial(-3, {'a': 5, 'y': 6, 'z': 7})
c = Polynomial(a, b)
A = Polynomial(a)
B = Polynomial(b)
C = A + A
D = simplify(C)
print(A)
print(B)
print(C)
print(D)
3 创建对偶四元数类
dualquaternion.py
# coding: utf-8
"""
@ Time: Created on 2019.04.07\n
@ Author: yukino\n
@ Description:Create a dual-quaternion class
"""
from polynomial import Polynomial, simplify
from monomial import Monomial
from math import atan2, sqrt, sin, tan
from numpy import pi
class DualQuaternion:
"""
对偶四元数类\n
初始化参数:List[8 个 Ploynomial 类]
"""
def __init__(self, quaterlist):
"""构造函数, 1个由8个多项式类构成的列表"""
self.real = quaterlist[:4] # 实部
self.dual = quaterlist[4:] # 对偶部
self.all = quaterlist # 所有参数
self.coefs = [i.coefs[0] for i in quaterlist] # 所有系数, 用于数值计算
def __str__(self):
"""输出重载"""
q = ['', 'i', 'j', 'k']
result = []
for i in range(4):
# 如果只有系数0则不输出
if len(set(self.real[i].coefs)) == 1 and self.real[i].coefs[0] == 0:
pass
else:
result.append('(' + str(self.real[i]) + ')' + q[i])
for i in range(4):
if len(set(self.dual[i].coefs)) == 1 and self.dual[i].coefs[0] == 0:
pass
else:
result.append('(' + str(self.dual[i]) + ')' + q[i])
term = ' + '.join(result)
return term
def __add__(self, dualquater):
"""对偶四元数加法重载"""
result = []
self = self.all
dualquater = dualquater.all
for i in range(8):
result.append(self[i] + dualquater[i])
return DualQuaternion(result)
def __sub__(self, dualquater):
"""对偶四元数减法重载"""
result = []
self = self.all
dualquater = dualquater.all
for i in range(8):
result.append(self[i] - dualquater[i])
return DualQuaternion(result)
def __mul__(self, dualquater):
"""对偶四元数乘法重载"""
q = self.all
p = dualquater.all
x0 = q[0]*p[0] - q[1]*p[1] - q[2]*p[2] - q[3]*p[3]
x1 = q[0]*p[1] + q[1]*p[0] + q[2]*p[3] - q[3]*p[2]
x2 = q[0]*p[2] - q[1]*p[3] + q[2]*p[0] + q[3]*p[1]
x3 = q[0]*p[3] + q[1]*p[2] - q[2]*p[1] + q[3]*p[0]
y0 = q[0]*p[4] - q[1]*p[5] - q[2]*p[6] - q[3]*p[7] + \
q[4]*p[0] - q[5]*p[1] - q[6]*p[2] - q[7]*p[3]
y1 = q[0]*p[5] + q[1]*p[4] + q[2]*p[7] - q[3]*p[6] + \
q[4]*p[1] + q[5]*p[0] + q[6]*p[3] - q[7]*p[2]
y2 = q[0]*p[6] - q[1]*p[7] + q[2]*p[4] + q[3]*p[5] + \
q[4]*p[2] - q[5]*p[3] + q[6]*p[0] + q[7]*p[1]
y3 = q[0]*p[7] + q[1]*p[6] - q[2]*p[5] + q[3]*p[4] + \
q[4]*p[3] + q[5]*p[2] - q[6]*p[1] + q[7]*p[0]
return DualQuaternion([x0, x1, x2, x3, y0, y1, y2, y3])
def printArray(self):
"""
打印对偶四元数每项\n
Output: List[str]
"""
q = ['s:', 'i:', 'j:', 'k:', '@s:', '@i:', '@j:', '@k:']
for i in range(8):
print(q[i] + '\t\t' + str(self.all[i]))
def dualqsimp(self):
"""
对偶四元数类简化函数\n
Output: Polynomial Class
"""
result = []
for i in self.all:
result.append(simplify(i))
return DualQuaternion(result)
def originalconj(self):
"""
第一种共轭运算, 是四元数共轭的延伸,记作q'\n
q = a + @b ,q' = a' + @b'\n
a' = s - oi - mj - nk\n
q*q'是标量
"""
result = self.deepcopy()
for poly in result.real[1:4]:
for mo in poly.monomials:
mo.coef = -mo.coef
for poly in result.dual[1:4]:
for mo in poly.monomials:
mo.coef = -mo.coef
return result
def dualconj(self):
"""
第二种共轭运算, 只是变换了对偶部的符号, 记作q^\n
q = a + @b ,q^ = a - @b
"""
result = self.deepcopy()
for poly in result.dual[0:4]:
for mo in poly.monomials:
mo.coef = -mo.coef
return result
def conj(self):
"""
第三种共轭运算, 是前两种的结合, 记作q'^\n
q = a + @b, q^' = a' - @b'\n
用于计算坐标转换:\n
Output = q * Input * q'^
"""
result = self.deepcopy()
for poly in result.real[1:4]:
for mo in poly.monomials:
mo.coef = -mo.coef
for mo in result.dual[0].monomials:
mo.coef = -mo.coef
return result
def normpow(self):
"""
输出对偶四元数模的平方, q = a + @b\n
|q|^2 = q*q' = a*a' + @(a*b' + b*a')\n
单位对偶四元数是指模为1\n
即: a*a' = 1, a*b' + b*a' = 0
"""
return self * self.originalconj()
def inverse(self):
"""
TODO: 逆运算
"""
pass
def toVector(self):
"""
转化为平移矢量和xyz欧拉角
"""
r = self.coefs[:4]
d = self.coefs[4:]
c = sqrt(r[0]**2+r[1]**2+r[2]**2+r[3]**2)
if c != 0:
r = [i/c for i in r]
p = [2*(r[0]*d[1]-r[1]*d[0]+r[2]*d[3]-r[3]*d[2]),
2*(r[0]*d[2]-r[1]*d[3]-r[2]*d[0]+r[3]*d[1]),
2*(r[0]*d[3]+r[1]*d[2]-r[2]*d[1]-r[3]*d[0])]
z = atan2(2*r[1]*r[2]-2*r[0]*r[3], r[0]**2+r[1]**2-r[2]**2-r[3]**2)
y = atan2(-2*(r[0]*r[2]+r[1]*r[3]), 1)
x = atan2(2*(r[2]*r[3]-r[0]*r[1]), r[0]**2-r[1]**2-r[2]**2+r[3]**2)
zpi = round(z/pi, 2)
ypi = round(y/pi, 2)
xpi = round(x/pi, 2)
print('\nEuler(pi): ', approx([xpi, ypi, zpi]), 'Vector: ', approx(p))
return [[x, y, z], p]
def toScrew(self):
"""
转化为螺旋, 输出:[s,sr,d,theta,rd,h,t]\n
s:原部 sr:对偶部\n
theta:绕螺旋轴转角 d:沿螺旋轴位移\n
rd:直线矩, 原点到螺旋轴的垂线 h:螺距
t: 平移
"""
r = self.coefs[:4]
d = self.coefs[4:]
c = sqrt(r[0]**2+r[1]**2+r[2]**2+r[3]**2)
if c != 0:
r = [i/c for i in r]
theta = 2*atan2(sqrt(r[1]**2+r[2]**2+r[3]**2), r[0])
s = [i/sin(theta/2) for i in r[1:]]
t = [2*(r[0]*d[1]-r[1]*d[0]+r[2]*d[3]-r[3]*d[2]),
2*(r[0]*d[2]-r[1]*d[3]-r[2]*d[0]+r[3]*d[1]),
2*(r[0]*d[3]+r[1]*d[2]-r[2]*d[1]-r[3]*d[0])]
de = s[0]*t[0] + s[1]*t[1] + s[2]*t[2]
cot = tan(pi/2-theta/2)
rd = [(t[0] - de*s[0] + cot*(t[1]*s[2]-t[2]*s[1]))/2,
(t[1] - de*s[1] + cot*(t[2]*s[0]-t[0]*s[2]))/2,
(t[2] - de*s[2] + cot*(t[0]*s[1]-t[1]*s[0]))/2]
h = 2*pi*de/theta
sr = [(rd[1]*s[2]-rd[2]*s[1])+h*s[0],
(rd[2]*s[0]-rd[0]*s[2])+h*s[1],
(rd[0]*s[1]-rd[1]*s[0])+h*s[2]]
screw = [s, sr, de, theta, rd, h, t]
print('\nScrew:\n\t(s, sr): (', approx(s), approx(sr), ')')
print('\ttheta(pi): ', approx2(theta/pi), '\td: ', approx2(de))
print('\tr: ', approx(rd), '\th: ', approx2(h))
print('\tt: ', approx(t))
return screw
def toTranMatrix(self):
"""
转化为旋转矩阵和位移,只适合数值运算\n
输出该对偶四元数变换后的坐标系,是坐标系变换\n
Output:[x轴坐标, y轴坐标, z轴坐标, o点坐标]
"""
r = self.coefs[:4]
d = self.coefs[4:]
c = sqrt(r[0]**2+r[1]**2+r[2]**2+r[3]**2)
if c != 0:
r = [i/c for i in r]
p = [2*(r[0]*d[1]-r[1]*d[0]+r[2]*d[3]-r[3]*d[2]),
2*(r[0]*d[2]-r[1]*d[3]-r[2]*d[0]+r[3]*d[1]),
2*(r[0]*d[3]+r[1]*d[2]-r[2]*d[1]-r[3]*d[0])]
R1 = [r[0]*r[0]+r[1]*r[1]-r[2]*r[2]-r[3]*r[3],
2*(r[1]*r[2]+r[0]*r[3]),
2*(r[1]*r[3]-r[0]*r[2])]
R2 = [2*(r[1]*r[2]-r[0]*r[3]),
r[0]*r[0]-r[1]*r[1]+r[2]*r[2]-r[3]*r[3],
2*(r[2]*r[3]+r[0]*r[1])]
R3 = [2*(r[1]*r[3]+r[0]*r[2]),
2*(r[2]*r[3]-r[0]*r[1]),
r[0]*r[0]-r[1]*r[1]-r[2]*r[2]+r[3]*r[3]]
print('\nRationMatrix:')
r1 = [round(i, 2) for i in R1]
r2 = [round(i, 2) for i in R2]
r3 = [round(i, 2) for i in R3]
rp = [round(i, 2) for i in p]
print("|{:6} {:6} {:6}|".format(r1[0], r2[0], r3[0]))
print("|{:6} {:6} {:6}|".format(r1[1], r2[1], r3[1]))
print("|{:6} {:6} {:6}|".format(r1[2], r2[2], r3[2]))
# print('\t|', r1[0], '\t', r2[0], '\t', r3[0], '\t|')
# print('\t|', r1[1], '\t', r2[1], '\t', r3[1], '\t|')
# print('\t|', r1[2], '\t', r2[2], '\t', r3[2], '\t|')
print('Translation:')
print('\t', rp)
return [R1, R2, R3, p]
def toMatrix(self):
"""
将对偶四元数转换为4x4齐次变换,只适合数值运算\n
q = a + @b\n
a = w + oi + mj + nk 表示旋转\n
b = 0 + x/2 + y/2 + z/2 表示位移x, y, z\n
Output:R = [x轴坐标, y轴坐标, z轴坐标, o点坐标]\n
相当于 p2 = q * p1 * q'^ \n
p2 = R[:4] * p1 + R[4]\n
"""
d = self.coefs[4:]
r = self.coefs[:4]
c = sqrt(r[0]**2+r[1]**2+r[2]**2+r[3]**2)
if c != 0:
r = [i/c for i in r]
p = [d[1], d[2], d[3]]
R1 = [r[0]*r[0]+r[1]*r[1]-r[2]*r[2]-r[3]*r[3],
2*(r[1]*r[2]+r[0]*r[3]),
2*(r[1]*r[3]-r[0]*r[2])]
R2 = [2*(r[1]*r[2]-r[0]*r[3]),
r[0]*r[0]-r[1]*r[1]+r[2]*r[2]-r[3]*r[3],
2*(r[2]*r[3]+r[0]*r[1])]
R3 = [2*(r[1]*r[3]+r[0]*r[2]),
2*(r[2]*r[3]-r[0]*r[1]),
r[0]*r[0]-r[1]*r[1]-r[2]*r[2]+r[3]*r[3]]
return [R1, R2, R3, p]
def normalize(self):
"""
实部归一化
"""
result = self.deepcopy()
rl = result.real
r = result.coefs[:4]
c = r[0]**2 + r[1]**2 + r[2]**2 + r[3]**2
c = sqrt(c)
for i in rl:
i.monomials[0].coef = i.monomials[0].coef/c
return result
def symbol(sym, dual=False):
"""
符号定义函数,定义为多项式类\n
Input: str\n
Output: Polynomial Class
"""
return Polynomial(Monomial(1, {sym: 1}, dual))
def number(num, dual=False):
"""
数字定义函数,定义为多项式类\n
Input: int or float\n
Output: Polynomial Class
"""
return Polynomial(Monomial(num, dual=dual))
def symbols(*syms):
"""一次定义多个符号的函数,方便定义符号,由于使用全局变量,应谨慎使用"""
names = globals()
for sym in syms:
if sym[0] == '@':
names[sym[1:]] = Polynomial(Monomial(1, {sym[1:]: 1}, True))
else:
names[sym] = Polynomial(Monomial(1, {sym: 1}))
def quaterSym(*syms):
"""
生成对偶四元数类所需的列表参数\n
Input: 8 str, int or float\n
Output: List of Polynomial Class
"""
result = []
for i in range(4):
if isinstance(syms[i], str):
result.append(symbol(syms[i]))
else:
result.append(number(syms[i]))
for i in range(4, 8):
if isinstance(syms[i], str):
result.append(symbol(syms[i], True))
else:
result.append(number(syms[i], True))
return result
def approx(nums):
e = 1e-15
r = []
for num in nums:
num1 = round(num, 1)
if abs(num - num1) < e:
r.append(num1)
else:
r.append(round(num, 4))
return r
def approx2(num):
e = 1e-15
num1 = round(num, 1)
if abs(num - num1) < e:
return num1
else:
return round(num, 4)
if __name__ == '__main__':
a = [2.0000000000000004, 0.9999999999999998, 1.717456, 3.1415, 2.5000000000000004]
b = approx(a)
print(b)
4 举个例子
需要安装mpl_toolkits库
plot3d.py 写了一些方便绘图的函数
# coding: utf-8
"""
@ Time: Created on 2019.04.7\n
@ Author: yukino\n
@ Description:Some function for drawing 3d plot
"""
import numpy as np
import math
from math import sin, cos, asin, sqrt
import matplotlib.pyplot as plt
import mpl_toolkits.mplot3d as p3d
def coord(plot, xyz=[[1, 0, 0], [0, 1, 0], [0, 0, 1]], o=[0, 0, 0], orgin='O', long=1):
"""绘制坐标系
输入窗口plot,x,y,z轴坐标, o原点坐标, 坐标轴长度"""
# ax.quiver(x, y, z, u, v, w, length=0.1, normalize=True)
plot.text(o[0], o[1], o[2], orgin, color='black')
plot.quiver(o[0], o[1], o[2], xyz[0][0], xyz[0][1], xyz[0][2], color='r', length=long,
arrow_length_ratio=0.1, normalize=True)
plot.quiver(o[0], o[1], o[2], xyz[1][0], xyz[1][1], xyz[1][2], color='g', length=long,
arrow_length_ratio=0.1, normalize=True)
plot.quiver(o[0], o[1], o[2], xyz[2][0], xyz[2][1], xyz[2][2], color='b', length=long,
arrow_length_ratio=0.1, normalize=True)
def screw(plot, s, p, h):
"""绘制螺旋线
输入窗口名称plot, 螺旋轴s, 螺旋轴位置p, 螺距h,"""
b = asin(-s[2])
a = asin(round(s[1]/cos(b), 8))
theta = np.linspace(-4 * np.pi, 4 * np.pi, 100)
r = sqrt(p[0]**2 + p[1]**2 + p[2]**2)
x = np.linspace(-2*h, 2*h, 100)
y = r * np.sin(theta)
z = r * np.cos(theta)
R1 = [s[0], -sin(a), cos(a)*sin(b)]
R2 = [s[1], cos(a), sin(a)*sin(b)]
R3 = [s[2], 0, cos(b)]
R = np.array([R1, R2, R3])
xyz = np.matmul(R, np.vstack((x, y, z)))
x = np.add(xyz[0, :], p[0])
y = np.add(xyz[1, :], p[1])
z = np.add(xyz[2, :], p[2])
plot.plot(x, y, z)
def SetAxLim(plot, lim=5):
plot.set_xlim(-lim, lim)
plot.set_ylim(-lim, lim)
plot.set_zlim(-lim, lim)
def myquiver(plot, start=[0, 0, 0], end=[1, 1, 1], color='b', name='v'):
end1 = tuple(approx(end))
end = [j-i for i, j in zip(start, end)]
sd0 = (end[0])**2
sd1 = (end[1])**2
sd2 = (end[2])**2
length = sqrt(sd0 + sd1 + sd2)
plot.quiver(start[0], start[1], start[2], end[0],
end[1], end[2], color=color, length=length,
arrow_length_ratio=0.1, normalize=True)
name = name + str(end1)
plot.text(end1[0], end1[1], end1[2], name, color='black')
def approx(nums):
e = 1e-15
r = []
for num in nums:
num1 = round(num, 1)
if abs(num - num1) < e:
r.append(num1)
else:
r.append(round(num, 4))
return r
def EanglesToRmatrix(theta):
"""ZYX欧拉角转旋转矩阵"""
R_x = np.array([[1, 0, 0],
[0, math.cos(theta[0]), -math.sin(theta[0])],
[0, math.sin(theta[0]), math.cos(theta[0])]
])
R_y = np.array([[math.cos(theta[1]), 0, math.sin(theta[1])],
[0, 1, 0],
[-math.sin(theta[1]), 0, math.cos(theta[1])]
])
R_z = np.array([[math.cos(theta[2]), -math.sin(theta[2]), 0],
[math.sin(theta[2]), math.cos(theta[2]), 0],
[0, 0, 1]
])
R = np.dot(R_z, np.dot(R_y, R_x))
return R
if __name__ == '__main__':
fig = plt.figure(figsize=(8, 8))
# ax = fig.gca(projection='3d')
ax = p3d.Axes3D(fig)
x = [1, 0, 0]
y = [0, 1, 0]
z = [0, 0, 1]
theta = [np.pi/4, 0, np.pi/4]
R = EanglesToRmatrix(theta)
x1 = np.dot(R, x)
y1 = np.dot(R, y)
z1 = np.dot(R, z)
coord(ax, x, y, z)
coord(ax, x1, y1, z1, [0.5, 0.5, 0.5])
ax.set_xlim(-1, 1)
ax.set_ylim(-1, 1)
ax.set_zlim(-1, 1)
# 比例一致
ax.get_proj = lambda: np.dot(p3d.Axes3D.get_proj(ax), np.diag([1, 1, 1, 1]))
plt.show()
主测试程序:
# coding: utf-8
"""
@ Time: Created on 2019.04.07\n
@ Author: yukino\n
@ Description:For debugging programs
"""
import dualquaternion as dq
import plot3d
import numpy as np
import math
import matplotlib.pyplot as plt
import mpl_toolkits.mplot3d as p3d
# 创建对偶四元数参数,可以是符号也可以是数字
o1 = dq.quaterSym(1, 0, 0, 0, 0, 0, 0, 0)
t = dq.quaterSym(1, 0, 0, 0, 0, 1, 1, 1)
r = dq.quaterSym(1, 1, 1, 0, 0, 0, 0, 0)
v = dq.quaterSym(1, 0, 0, 0, 0, 1, 1, 1)
q1 = dq.DualQuaternion(o1)
qr = dq.DualQuaternion(r).normalize()
print(qr)
qt = dq.DualQuaternion(t)
qv = dq.DualQuaternion(v)
print('qt\': \t', qt.conj())
vr = (qr * qv * qr.conj()).dualqsimp()
vt = (qt * qv * qt.conj()).dualqsimp()
print('vt: \t', vt)
tr = (qt*qr).dualqsimp()
print('tr: \t', tr)
# print((qr.conj()*qt.conj()).dualqsimp())
vrt = (tr * qv * tr.conj()).dualqsimp().dualqsimp()
print('input: \t', qv)
print('output: ', vrt)
O1 = q1.toMatrix()
A = qv.toMatrix()
B = vr.toMatrix()
C = vrt.toMatrix()
D = tr.toTranMatrix()
E = tr.toVector()
S = tr.toScrew()
fig = plt.figure(figsize=(8, 8))
ax = p3d.Axes3D(fig)
# plot3d.coord(ax, A[:3], A[3], 'O1')
# plot3d.coord(ax, B[:3], B[3], 'O2')
# plot3d.coord(ax, C[:3], C[3], 'O3')
ax.quiver(S[4][0], S[4][1], S[4][2], S[0][0], S[0][1], S[0][2], color='black', length=10,
arrow_length_ratio=0.02, normalize=True, pivot='middle')
plot3d.screw(ax, S[0], S[4], S[5])
plot3d.coord(ax, D[:3], D[3], 'O4')
plot3d.coord(ax, O1[:3], O1[3])
plot3d.myquiver(ax, end=A[3], color='r', name='v1')
plot3d.myquiver(ax, end=C[3], color='g', name='v2')
plot3d.myquiver(ax, end=S[4], color='black', name='r')
# plot3d.myquiver(ax, end=[A[3][0], -A[3][1], -A[3][2]], color='r', name='v3')
plot3d.myquiver(ax, D[3], C[3], 'b', name='v4')
# ax.quiver(0, 0, 0, A[3][0], A[3][1], A[3][2], color='r', length=3,
# arrow_length_ratio=0.1, normalize=True)
# ax.quiver(0, 0, 0, C[3][0], C[3][1], C[3][2], color='b', length=3,
# arrow_length_ratio=0.1, normalize=True)
# ax.quiver(D[3][0], D[3][1], D[3][2], C[3][0], C[3][1], C[3][2], color='g', length=3,
# arrow_length_ratio=0.1, normalize=True)
plot3d.SetAxLim(ax, 3)
plt.show()
结果如下,输出转换后的结果,齐次变换矩阵,欧拉角与平移矢量,以及螺旋表示参数
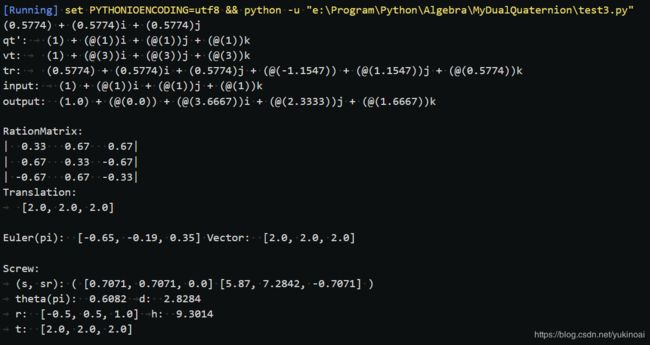
同时输出转换后的矢量与坐标系及螺旋轴的图:

