计算机视觉OpenCV答题卡识别项目实战
本文借鉴大佬的(跪求不要举报我 Orz Orz )
https://www.jianshu.com/p/01f32eb99318
答题卡识别项目实战
# 预处理
image = cv2.imread(args["image"])
contours_img = image.copy()
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
cv_show('blurred',blurred)
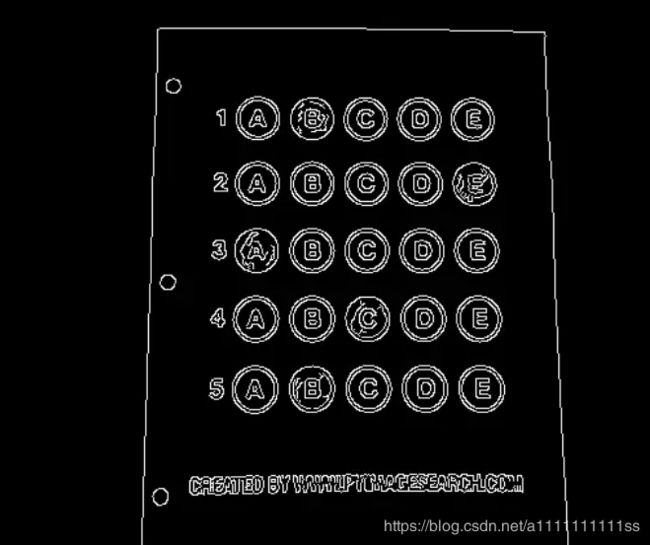
edged = cv2.Canny(blurred, 75, 200)
cv_show('edged',edged)
最先复制一下
cv2.GaussianBlur高斯滤波
cv2.Canny边缘检测
转灰度
边缘检测
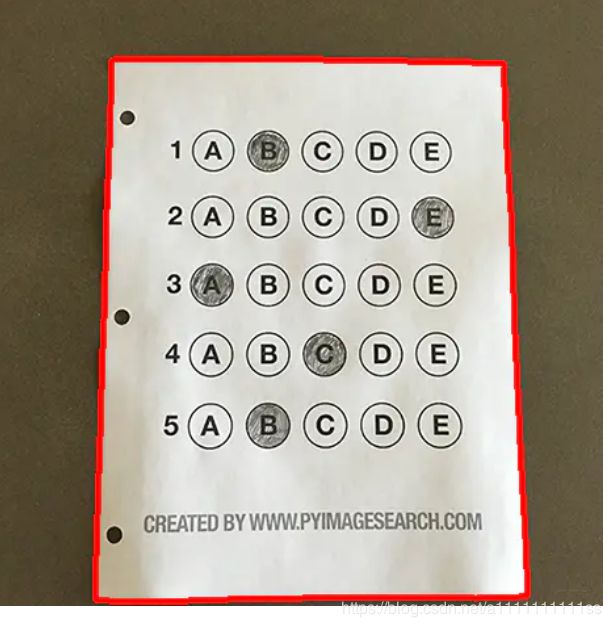
cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)[1]
cv2.drawContours(contours_img,cnts,-1,(0,0,255),3)
cv_show('contours_img',contours_img)
docCnt = None
轮廓检测
根据轮廓面积排序
# 确保检测到了
if len(cnts) > 0:
# 根据轮廓大小进行排序
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)
# 遍历每一个轮廓
for c in cnts:
# 近似
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
# 准备做透视变换,如果多边形的顶点有四个
if len(approx) == 4:
docCnt = approx
break
cv2.approxPolyDP 多边拟合函数
轮廓周长
perimeter = cv2.arcLength(cnt, True)
轮廓面积
area = cv2.contourArea(cnt)
透视变换

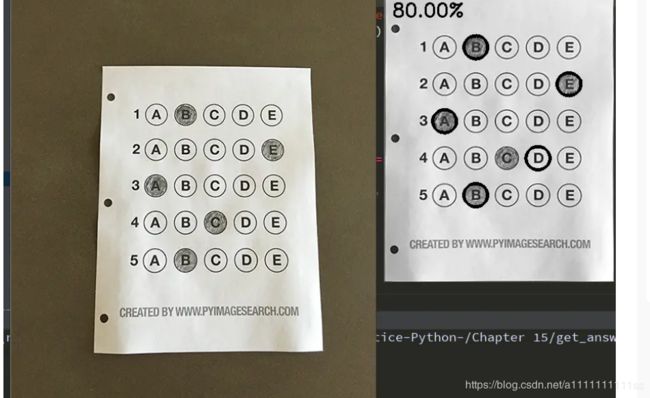
分析:截取这个图片中的答题卡的矩阵然后通过截取的面机大小进行排序在通过透视变化得到变换后的图再去截取中间的圆圆
采用自适应的阈值对其进行处理:
函数还是 cv2.threshold(),但是需要多传入一个参数( flag): cv2.THRESH_OTSU。这时要把阈值设为 0。然后算法会找到最优阈值,这个最优阈值就是返回值 retVal。如果不使用 Otsu 二值化,返回的retVal 值与设定的阈值相等。
# Otsu's 阈值处理
thresh = cv2.threshold(warped, 0, 255,
cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1]
cv_show('thresh',thresh)
轮廓检测去检测园
# 找到每一个圆圈轮廓
cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)[1]
cv2.drawContours(thresh_Contours,cnts,-1,(0,0,255),3)
cv_show('thresh_Contours',thresh_Contours)
筛选依据实际情况,划定固定区域,然后进行圆检测,计算比例,将不符合的去除掉:
questionCnts = []
# 遍历
for c in cnts:
# 计算比例和大小
(x, y, w, h) = cv2.boundingRect(c)
ar = w / float(h)
# 根据实际情况指定标准
if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1:
questionCnts.append(c)
# 按照从上到下进行排序
questionCnts = sort_contours(questionCnts,
method="top-to-bottom")[0]
竖着排序每一题每一题的排序
def sort_contours(cnts, method="left-to-right"):
reverse = False
i = 0
if method == "right-to-left" or method == "bottom-to-top":
reverse = True
if method == "top-to-bottom" or method == "bottom-to-top":
i = 1
boundingBoxes = [cv2.boundingRect(c) for c in cnts]
(cnts, boundingBoxes) = zip(*sorted(zip(cnts, boundingBoxes),
key=lambda b: b[1][i], reverse=reverse))
按照每排为参照,依次判断
# 每排有5个选项
for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)):
# 排序
cnts = sort_contours(questionCnts[i:i + 5])[0]
bubbled = None
# 遍历每一个结果
for (j, c) in enumerate(cnts):
# 使用mask来判断结果
mask = np.zeros(thresh.shape, dtype="uint8")
cv2.drawContours(mask, [c], -1, 255, -1) #-1表示填充
cv_show('mask',mask)
# 通过计算非零点数量来算是否选择这个答案
mask = cv2.bitwise_and(thresh, thresh, mask=mask)
total = cv2.countNonZero(mask)
# 通过阈值判断
if bubbled is None or total > bubbled[0]:
bubbled = (total, j)
# 对比正确答案
color = (0, 0, 255)
k = ANSWER_KEY[q]
# 判断正确
if k == bubbled[1]:
color = (0, 255, 0)
correct += 1
# 绘图
cv2.drawContours(warped, [cnts[k]], -1, color, 3)
最终
代码链接https://pan.baidu.com/s/1nMUHmnVuIFN1hKWQseo5Ww
提取码kr8s