信号与系统:第一章
原文链接:https://littlefish33.cn/SignalAndSystem/chapter1
- 第一章 信号与系统
- 连续时间信号与离散时间信号
- 定义
- Signal Energy and Power
- Transformation of the independent variable 自变量的变换
- 自变量变换
- 周期信号 period signal
- 偶信号和奇信号
- Exponential and Sinusoidal Signal 指数信号和正弦信号
- Continuous-Time Complex Exponential and Sinusoidal Signals 连续时间信号的复指数信号和正弦信号
- 离散时间下的复指数信号
- 离散时间复指数序列的周期性质
- The Unit Impulse and Unit Step Function 单位冲激信号和单位阶跃信号
- The Discrete-Time Unit Impulse and Unit Step Sequences 离散时间信号的单位脉冲和单位阶跃序列
- 连续时间的单位阶跃和单位冲激函数
- The property of Unit Impulse Function
- Continuous-Time and discrete-time system 连续时间和离散时间系统
- 简单系统举例
- Basic System Properties 基本系统性质
- System with and without Memory 记忆系统与无记忆系统
- Invertibility and Inverse System 可逆系统与不可逆系统
- Causality 因果性
- Stability 稳定性
- Time Invariance 时不变性
- Linearity 线性
- 连续时间信号与离散时间信号
第一章 信号与系统
连续时间信号与离散时间信号
定义
Continuous-Time Signal:用t表示,( )
Discrete-Time Signal:用n表示,[ ],称为离散时间序列
Signal Energy and Power
- instantaneous power 瞬时功率: p(t)=|x(t)|2 p ( t ) = | x ( t ) | 2
- total energy 总能量:
- E=∫t2t1p(t)dt E = ∫ t 1 t 2 p ( t ) d t (连续时间信号) t1≤t≤t2 t 1 ≤ t ≤ t 2
- E=∑n2n=n1x2[n] E = ∑ n = n 1 n 2 x 2 [ n ] (离散时间信号) n1≤n≤n2 n 1 ≤ n ≤ n 2
- E∞=∫+∞−∞p(t)dt E ∞ = ∫ − ∞ + ∞ p ( t ) d t (连续时间信号) −∞<t<+∞ − ∞ < t < + ∞
- E∞=∑+∞−∞x2[n] E ∞ = ∑ − ∞ + ∞ x 2 [ n ] (离散时间信号) −∞<n<+∞ − ∞ < n < + ∞
- Time-averaged power 平均功率
- P∞=limT→∞12T∫T−T|x(t)|2dt P ∞ = lim T → ∞ 1 2 T ∫ − T T | x ( t ) | 2 d t 连续时间信号
- P∞=limN→∞12N∑Nn=−N|x[n]|2 P ∞ = lim N → ∞ 1 2 N ∑ n = − N N | x [ n ] | 2 离散时间信号
- 分类
- 能量信号(Energy signal): E∞<∞,P∞=0 E ∞ < ∞ , P ∞ = 0 能量有限
- 功率信号(Power signal): P∞<∞,E∞→∞ P ∞ < ∞ , E ∞ → ∞
- 总能量发散 ⇒E∞→∞ ⇒ E ∞ → ∞
- 平均功率不收敛 ⇒P∞→∞ ⇒ P ∞ → ∞
Transformation of the independent variable 自变量的变换
自变量变换
Time shift 时移
Time reversal 时间反转
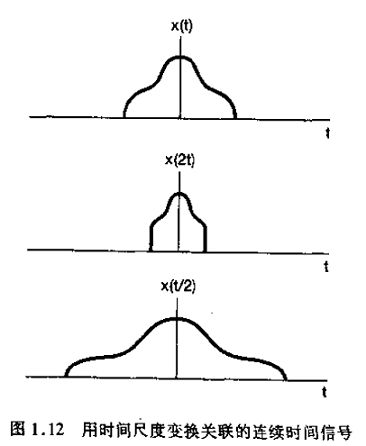
Time scaling 尺度变换
- 连续时间信号: t→at⇒x(t)→x(at) t → a t ⇒ x ( t ) → x ( a t )
先左右移动,再反转,最后尺度变换(所乘系数的倒数)

周期信号 period signal
x(t)=x(t+T) x ( t ) = x ( t + T ) ,使该式成立的最小正值 T T 称为基波周期(fundamental period)
偶信号和奇信号
- odd signal x(−t)=−x(t) x ( − t ) = − x ( t ) x[−n]=−x[n] x [ − n ] = − x [ n ]
- even signal x(−t)=x(t) x ( − t ) = x ( t ) x[−n]=x[n] x [ − n ] = x [ n ]
- 任何信号都可以分解为奇信号和偶信号
- 偶部: Ev{x(t)}=12[x(t)+x(−t)] E v { x ( t ) } = 1 2 [ x ( t ) + x ( − t ) ]
- 奇部: Od{x(t)}=12[x(t)−x(−t)] O d { x ( t ) } = 1 2 [ x ( t ) − x ( − t ) ]
Exponential and Sinusoidal Signal 指数信号和正弦信号
基本信号是整个信号与系统的重要概念,研究基本信号通过系统的响应,再以此为材料,研究复杂信号通过系统的响应。其他信号大部分可以通过基本信号来表示,且基本信号通过系统的响应容易分析,由此分析复杂信号通过系统的响应。研究两个重要的基本信号,两个单位的冲激信号通过系统的响应,建立连续/离散时间信号输入/输出的映射关系,进一步用复指数信号来表示其他信号,因此我们要知道基本信号在时域上的特征有所了解。
Continuous-Time Complex Exponential and Sinusoidal Signals 连续时间信号的复指数信号和正弦信号
x(t)=C⋅est−∞<t<∞ x ( t ) = C ⋅ e s t − ∞ < t < ∞ (s为复数)
当其作为时间函数时, s s 是确定的,但 s s 的值将使信号表现出不同的特征
当 s s 为实数时,real exponential signals 实指数信号 x(t)=C⋅eat x ( t ) = C ⋅ e a t
当 s s 为纯虚数时,periodic complex exponential and sinusoidal signal 周期复指数信号和正弦信号
x(t)=C⋅ejw0t,−∞<t<∞,s=jw0 x ( t ) = C ⋅ e j w 0 t , − ∞ < t < ∞ , s = j w 0
(1)period 周期:
ejw0(t+T)=ejw0t e j w 0 ( t + T ) = e j w 0 t
⇒ejw0T=1 ⇒ e j w 0 T = 1
⇒cosw0T+jsinw0T=1 ⇒ c o s w 0 T + j s i n w 0 T = 1
⇒w0T=2kπ,k=0,±1,±2,... ⇒ w 0 T = 2 k π , k = 0 , ± 1 , ± 2 , . . .
因此, T=2πkw0 T = 2 π k w 0
基波周期: T0=2π|w0| T 0 = 2 π | w 0 | , w0 w 0 为基波频率(fundamental frequency)
(2)Euler’s relation 欧拉关系
(3)Average Power
功率信号
(4)Harmonic relation 谐波关系
ejw0t→ e j w 0 t → 基本信号
∅k(t)=ejkw0t,k=0,±1,±2,... ∅ k ( t ) = e j k w 0 t , k = 0 , ± 1 , ± 2 , . . .
共同周期: T0=2π|w0| T 0 = 2 π | w 0 | , w0 w 0 为基波周期
kth k t h 谐波: Tk=T0|k|,wk=kw0 T k = T 0 | k | , w k = k w 0
- 一般复指数信号
离散时间下的复指数信号
x[n]=C⋅αn,−∞<n<∞ x [ n ] = C ⋅ α n , − ∞ < n < ∞
x[n]=C⋅eβn x [ n ] = C ⋅ e β n ,当 α=eβ α = e β 时
- 实指数信号: α=a⇒x[n]=C⋅an α = a ⇒ x [ n ] = C ⋅ a n
- 周期复指数信号和正弦信号: β=jw⇒x[n]=ejw0n β = j w ⇒ x [ n ] = e j w 0 n
- 一般复指数信号:
x[n]=C⋅αn,C=|C|⋅ejθ,α=|α|⋅ejw0,∴x[n]=|C||α|⋅ej(w0n+θ) x [ n ] = C ⋅ α n , C = | C | ⋅ e j θ , α = | α | ⋅ e j w 0 , ∴ x [ n ] = | C | | α | ⋅ e j ( w 0 n + θ )
离散时间复指数序列的周期性质
ej(w0n+2πn)=ejw0n⋅ej2πn=ejw0n e j ( w 0 n + 2 π n ) = e j w 0 n ⋅ e j 2 π n = e j w 0 n , w0 w 0 变化 2kπ 2 k π 时信号相同, w0∈[0,2π) w 0 ∈ [ 0 , 2 π )
ejw0t=cosw0n+jsinw0n e j w 0 t = c o s w 0 n + j s i n w 0 n
w0=2kπ w 0 = 2 k π ,信号频率低; w0=(2k+1)π w 0 = ( 2 k + 1 ) π ,信号频率高
周期特点: w02π=kN→ w 0 2 π = k N → 有理数; N=2πw⋅k N = 2 π w ⋅ k ,基波周期
| ejw0t e j w 0 t | ejw0n e j w 0 n |
|---|---|
| w0 w 0 不同,信号不同 | w0 w 0 相差 2kπ 2 k π ,信号相同 |
| w0 w 0 越大,频率越高 | w0=2kπ w 0 = 2 k π ,低频; w0=(2k+1)π w 0 = ( 2 k + 1 ) π ,高频 |
| 周期信号 | 当 w02π w 0 2 π 有理时,为周期信号 |
4. 对于成谐波关系的信号 ∅k[n]=ejkw0n,k=0,±1,±2,... ∅ k [ n ] = e j k w 0 n , k = 0 , ± 1 , ± 2 , . . . ,在这组信号中,互不相同的信号只有N组
The Unit Impulse and Unit Step Function 单位冲激信号和单位阶跃信号
The Discrete-Time Unit Impulse and Unit Step Sequences 离散时间信号的单位脉冲和单位阶跃序列
Unit Impulse: δ[n]={10n=0n≠0 δ [ n ] = { 1 n = 0 0 n ≠ 0
Unit Step: u[n]={10n≥0n<0 u [ n ] = { 1 n ≥ 0 0 n < 0

- 取样特性 Sampling property
x[n]δ[n]=x[0]δ[n] x [ n ] δ [ n ] = x [ 0 ] δ [ n ]
x[n]δ[n−k]=x[k]δ[n−k] x [ n ] δ [ n − k ] = x [ k ] δ [ n − k ]
∑+∞k=−∞x[n]δ[n−k]=∑+∞k=−∞x[k]δ[n−k] ∑ k = − ∞ + ∞ x [ n ] δ [ n − k ] = ∑ k = − ∞ + ∞ x [ k ] δ [ n − k ]
∵∑∞k=−∞δ[n−k]=1⇒x[n]=∑∞k=−∞x[k]δ[n−k] ∵ ∑ k = − ∞ ∞ δ [ n − k ] = 1 ⇒ x [ n ] = ∑ k = − ∞ ∞ x [ k ] δ [ n − k ] (单位冲激信号的筛选特性)
u[n]=∑+∞k=−∞u[k]δ[n−k]=∑+∞k=0u[k]δ[n−k]=∑+∞k=0δ[n−k] u [ n ] = ∑ k = − ∞ + ∞ u [ k ] δ [ n − k ] = ∑ k = 0 + ∞ u [ k ] δ [ n − k ] = ∑ k = 0 + ∞ δ [ n − k ]
⇒u[n]=∑nm=−∞δ[m] ⇒ u [ n ] = ∑ m = − ∞ n δ [ m ]
δ[n]=u[n]−u[n−1] δ [ n ] = u [ n ] − u [ n − 1 ]
连续时间的单位阶跃和单位冲激函数
- 单位阶跃函数 u(t)={10t>0t<0 u ( t ) = { 1 t > 0 0 t < 0
- 单位冲激信号
- δ(t)=du(t)dt,u(t)=∫t−∞δ(τ)dτ δ ( t ) = d u ( t ) d t , u ( t ) = ∫ − ∞ t δ ( τ ) d τ
- δ(t)={0∫+∞−∞δ(t)dt=1t≠0t=0,∫0+0−δ(t)dt=1 δ ( t ) = { 0 t ≠ 0 ∫ − ∞ + ∞ δ ( t ) d t = 1 t = 0 , ∫ 0 − 0 + δ ( t ) d t = 1
- 在第二章引入卷积积分的严密定义
- 如果 s(t) s ( t ) 是偶信号, ∫+∞−∞δ(t)dt=1⇒δ(t)=limk→∞k⋅s(kt) ∫ − ∞ + ∞ δ ( t ) d t = 1 ⇒ δ ( t ) = lim k → ∞ k ⋅ s ( k t )
The property of Unit Impulse Function
Sampling and Sifting properties
f(t)δ(t)=f(0)δ(t) f ( t ) δ ( t ) = f ( 0 ) δ ( t ) ,冲激值变为f(0),采样特性
∫+∞−∞f(t)⋅δ(t)dt=f(0) ∫ − ∞ + ∞ f ( t ) ⋅ δ ( t ) d t = f ( 0 ) ,筛选特性
注意,采样特性得到的是冲激,筛选特性得到的是常数
∫+∞−∞f(t)δ(t)dt=∫0+0−f(t)δ(t)dt=f(0)∫0+0−δ(t)dt=f(0) ∫ − ∞ + ∞ f ( t ) δ ( t ) d t = ∫ 0 − 0 + f ( t ) δ ( t ) d t = f ( 0 ) ∫ 0 − 0 + δ ( t ) d t = f ( 0 )
∫+∞−∞φ(t)f(t)δ(t)dt=f(0)φ(0) ∫ − ∞ + ∞ φ ( t ) f ( t ) δ ( t ) d t = f ( 0 ) φ ( 0 )
推广:
- f(t)δ(t−t0)=f(t0)⋅δ(t−t0) f ( t ) δ ( t − t 0 ) = f ( t 0 ) ⋅ δ ( t − t 0 )
- ∫+∞−∞f(t)δ(t−t0)dt=f(t0) ∫ − ∞ + ∞ f ( t ) δ ( t − t 0 ) d t = f ( t 0 )
Scaling property
如果 a a 是实数, a≠0 a ≠ 0 , δ(at)=1|a|δ(t) δ ( a t ) = 1 | a | δ ( t ) ,改变冲激的强度
特别的,当 a≠−1 a ≠ − 1 时, δ(−t)=δ(t) δ ( − t ) = δ ( t ) ,偶函数
Continuous-Time and discrete-time system 连续时间和离散时间系统
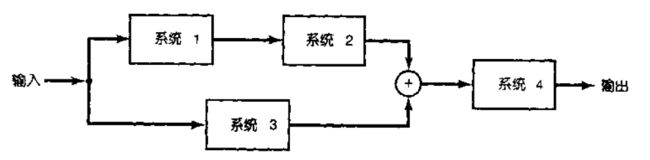
简单系统举例
串联 series interconnection
级联 cascade interconnection ⊕ ⊕ 表示相加
反馈互联 feedback interconnection
Basic System Properties 基本系统性质
System with and without Memory 记忆系统与无记忆系统
- 无记忆系统:一个系统的输入仅仅取决于该时刻的输入
- 有记忆系统:一个系统的输入取决于以前的输入或以后的输入
- y(t)=x(t)→ y ( t ) = x ( t ) → 无记忆系统,恒等系统(identity system)
- y[n]=∑nk=−∞x[k]→ y [ n ] = ∑ k = − ∞ n x [ k ] → 有记忆系统,累加器(accumulator)或相加器(summer)
- y[n]=x[n−1]→ y [ n ] = x [ n − 1 ] → 有记忆系统,延迟单元(delay)
Invertibility and Inverse System 可逆系统与不可逆系统
一一对应

Causality 因果性
因果系统:一个系统在任何时刻的输入只取决于现在的输入和过去的输入,该系统就称为因果系统
无记忆系统 ⊂ ⊂ 因果系统
Stability 稳定性
稳定系统:有界的输入对应有界的输出 |x(t)|<M⇒|y(t)|<B | x ( t ) | < M ⇒ | y ( t ) | < B
eg: y(t)=tx(t) y ( t ) = t x ( t ) 不稳定,若对于 ∀t,x(t)=A,A ∀ t , x ( t ) = A , A 为常数,那么 y(t)→∞ y ( t ) → ∞
Time Invariance 时不变性
输入时移,输出时移,形状不发生改变
y(t)=L{x(t)}⇒L{x(t−t0)}=y(t−t0) y ( t ) = L { x ( t ) } ⇒ L { x ( t − t 0 ) } = y ( t − t 0 )
eg:
y(t)=sin[x(t)] y ( t ) = s i n [ x ( t ) ]
y1(t)=sin[x1(t)] y 1 ( t ) = s i n [ x 1 ( t ) ]
x2(t)=x1(t−t0) x 2 ( t ) = x 1 ( t − t 0 )
y2(t)=sin[x2(t)]=sin[x1(t−t0)]=y1(t−t1) y 2 ( t ) = s i n [ x 2 ( t ) ] = s i n [ x 1 ( t − t 0 ) ] = y 1 ( t − t 1 ) ,时不变系统
eg:
y(t)=x(2t) y ( t ) = x ( 2 t )
y1(t)=x1(2t) y 1 ( t ) = x 1 ( 2 t )
x2(t)=x1(t−t0) x 2 ( t ) = x 1 ( t − t 0 )
y2(t)=x2(2t)=x1(2t−t0)≠y1(t−t0) y 2 ( t ) = x 2 ( 2 t ) = x 1 ( 2 t − t 0 ) ≠ y 1 ( t − t 0 ) ,时变系统
Linearity 线性
- Additivity 可加性
{f1(t)→y1(t)f2(t)→y2(t)⇒f1(t)+f2(t)→y1(t)+y2(t) { f 1 ( t ) → y 1 ( t ) f 2 ( t ) → y 2 ( t ) ⇒ f 1 ( t ) + f 2 ( t ) → y 1 ( t ) + y 2 ( t )
- Scaling 比例性 或 Homogeneous 齐次性
f(t)→y(t)⇒af(t)→ay(t) f ( t ) → y ( t ) ⇒ a f ( t ) → a y ( t )
af1(t)+bf2(t)→ay1(t)+by2(t) a f 1 ( t ) + b f 2 ( t ) → a y 1 ( t ) + b y 2 ( t )
eg:
y(t)=tx(t) y ( t ) = t x ( t )
y1(t)=tx1(t) y 1 ( t ) = t x 1 ( t )
y2(t)=tx2(t) y 2 ( t ) = t x 2 ( t )
x(t)=Ax1(t)+Bx2(t) x ( t ) = A x 1 ( t ) + B x 2 ( t )
y(t)=tAx1(t)+tBx2(t)=ty1(t)+ty2(t) y ( t ) = t A x 1 ( t ) + t B x 2 ( t ) = t y 1 ( t ) + t y 2 ( t ) ,线性的
- 增量线性系统(incrementally linear system):一个系统的总输入由一个线性系统的响应与一个零输入响应(如 y0[n]=3 y 0 [ n ] = 3 )的叠加组成
