shared_ptr的一些尴尬
智能指针是万能良药?
智能指针为解决资源泄漏,编写异常安全代码提供了一种解决方案,那么他是万能的良药吗?使用智能指针,就不会再有资源泄漏了吗?来看下面的代码:
//header file
void func( shared_ptr ptr1, shared ptr ptr2 );
//call func like this
func( shared_ptr( new T1() ), shared_ptr( new T2() ) );
上面的函数调用,看起来是安全的,但在现实世界中,其实不然:由于C++并未定义一个表达式的求值顺序,因此上述函数调用除了func在最后得到调用之外是可以确定,其他的执行序列则很可能被拆分成如下步骤:
a. 分配内存给T1
b. 构造T1对象
c. 分配内存给T2
d. 构造T2对象
e. 构造T1的智能指针对象
f. 构造T2的智能指针对象
g. 调用func
或者:
a’. 分配内存给T1
b’. 分配内存给T2
c’. 构造T1对象
d’. 构造T2对象
e’. 构造T1的智能指针对象
f’. 构造T2的智能指针对象
g’. 调用func
上述无论哪种形式的构造序列,如果在c或者d / c’或者d’失败,则T1对象所分配内存必然泄漏。
为解决这个问题,有一个依然使用智能智能的笨重办法:
template
shared_ptr shared_ptr_new()
{
return shared_ptr( new T );
}
//call like this
func( shared_ptr_new(), shared_ptr_new() ); 其实,最最完美的方案,其实是最简单的——就是尽量简单的书写代码,像这样:
//header file
void func( shared_ptr ptr1, shared_ptr ptr2 );
//call func like this
shared_ptr ptr1( new T1() );
shared_ptr ptr2( new T2() );
func(ptr1, ptr2 ); 这样简简单单的代码,避免了异常导致的泄漏。又应了那句话:简单就是美。其实,在一个表达式中,分配多个资源,或者需要求多个值等操作都是不安全的。
归总一句话:抛弃临时对象,让所有的智能指针都有名字,就可以避免此类问题的发生。
shared_ptr 交叉引用导致的泄漏
是否让每个智能指针都有了名字,就不会再有内存泄漏?不一定。看看下面代码的输出,是否感到惊讶?
class CLeader;
class CMember;
class CLeader
{
public:
CLeader() { cout << "CLeader::CLeader()" << endl; }
~CLeader() { cout << "CLeader:;~CLeader() " << endl; }
std::shared_ptr member;
};
class CMember
{
public:
CMember() { cout << "CMember::CMember()" << endl; }
~CMember() { cout << "CMember::~CMember() " << endl; }
std::shared_ptr leader;
};
void TestSharedPtrCrossReference()
{
cout << "TestCrossReference<<<" << endl;
boost::shared_ptr ptrleader( new CLeader );
boost::shared_ptr ptrmember( new CMember );
ptrleader->member = ptrmember;
ptrmember->leader = ptrleader;
cout <<" ptrleader.use_count: " << ptrleader.use_count() << endl;
cout <<" ptrmember.use_count: " << ptrmember.use_count() << endl;
}
//output:
CLeader::CLeader()
CMember::CMember()
ptrleader.use_count: 2
ptrmember.use_count: 2 从运行输出来看,两个对象的析构函数都没有调用,也就是出现了内存泄漏——原因在于:TestSharedPtrCrossReference()函数退出时,两个shared_ptr对象的引用计数都是2,所以不会释放对象;
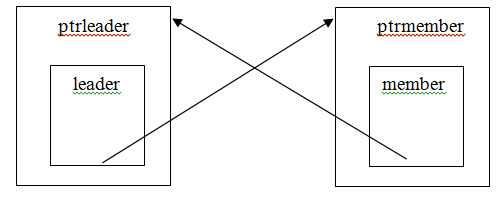
这里出现了常见的交叉引用问题,这个问题,即使用原生指针互相记录时也需要格外小心;shared_ptr在这里也跌了跟头,ptrleader和ptrmember在离开作用域的时候,由于引用计数不为1,所以最后一次的release操作(shared_ptr析构函数里面调用)也无法destroy掉所托管的资源。
为了解决这种问题,可以采用weak_ptr来隔断交叉引用中的回路。所谓的weak_ptr,是一种弱引用,表示只是对某个对象的一个引用和使用,而不做管理工作;我们把他和shared_ptr来做一下对比:
| shared_ptr |
weak_ptr |
| 强引用 |
弱引用 |
| 强引用存在,则引用的对象必定存在; 只要有一个强引用存在,强引用对象就不能释放 |
是对象存在时的一个引用; 及时有弱引用存在,对象仍然可以释放 |
| 增加对象的引用计数 |
不增加对象的引用计数 |
| 负责资源管理,在引用计数为0时释放资源 |
不负责资源管理 |
| 有多个构造函数,可以从任意类型初始化 |
只能从一个shared_ptr或者weak_ptr对象上进行初始化 |
|
|
行为类似原生指针,不过可以用expired()判断对象是否已经释放 |
由于weak_ptr具有上述的一些性质,所以如果把CMember的声明改成如下形式,就可以解除这种循环,从而每个资源都可以顺利释放。
class CMember
{
public:
CMember() { cout << "CMember::CMember()" << endl; }
~CMember() { cout << "CMember::~CMember() " << endl; }
boost::weak_ptr leader;
}; 这种使用weak_ptr的方式,是基于已暴露问题的修正方案,在做设计的时候,一般很难注意到这一点;总之,C++缺少垃圾收集机制,虽然智能指针提供了一个的解决方案,但他也难以到达完美;因此,C++中的资源管理必须慎之又慎。
类向外传递this与shared_ptr
可以说,shared_ptr着力解决类对象一级的资源管理,至于类对象内部,shared_ptr暂时还无法管理;那么这是否会出现问题呢?来看看这样的代码:
class Point1
{
public:
Point1() : X(0), Y(0) { cout << "Point1::Point1(), (" << X << "," << Y << ")" << endl; }
Point1(int x, int y) : X(x), Y(y) { cout << "Point1::Point1(int x, int y), (" << X << "," << Y << ")" << endl; }
~Point1() { cout << "Point1::~Point1(), (" << X << "," << Y << ")" << endl; }
public:
Point1* Add(const Point1* rhs) { X += rhs->X; Y += rhs->Y; return this;}
private:
int X;
int Y;
};
void TestPoint1Add()
{
cout << "TestPoint1Add() >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>" << endl;
shared_ptr p1( new Point1(2,2) );
shared_ptr p2( new Point1(3,3) );
p2.reset( p1->Add(p2.get()) );
}
输出为:
TestPoint1Add() >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
Point1::Point1(int x, int y), (2,2)
Point1::Point1(int x, int y), (3,3)
Point1::~Point1(), (3,3)
Point1::~Point1(), (5,5)
Point1::~Point1(), (5411568,5243076) 为了使类似Point::Add()::Add()可以连续进行Add操作成为可能,Point1定义了Add方法,并返回了this指针(从Effective C++的条款看,这里最好该以传值形式返回临时变量,在此为了说明问题,暂且不考虑这种设计是否合理,但他就这样存在了)。在TestPoint1Add()函数中,使用此返回的指针重置了p2,这样p2和p1就同时管理了同一个对象,但是他们却互相不知道这事儿,于是悲剧发生了。在作用域结束的时候,他们两个都去对所管理的资源进行析构,从而出现了上述的输出。从最后一行输出也可以看出,所管理的资源,已经处于“无效”的状态了。
那么,我们是否可以改变一下呢,让Add返回一个shared_ptr了呢。我们来看看Point2:
class Point2
{
public:
Point2() : X(0), Y(0) { cout << "Point2::Point2(), (" << X << "," << Y << ")" << endl; }
Point2(int x, int y) : X(x), Y(y) { cout << "Point2::Point2(int x, int y), (" << X << "," << Y << ")" << endl; }
~Point2() { cout << "Point2::~Point2(), (" << X << "," << Y << ")" << endl; }
public:
shared_ptr Add(const Point2* rhs) { X += rhs->X; Y += rhs->Y; return shared_ptr(this);}
private:
int X;
int Y;
};
void TestPoint2Add()
{
cout << endl << "TestPoint2Add() >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>" << endl;
shared_ptr p1( new Point2(2,2) );
shared_ptr p2( new Point2(3,3) );
p2.swap( p1->Add(p2.get()) );
}
输出为:
TestPoint2Add() >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
Point2::Point2(int x, int y), (2,2)
Point2::Point2(int x, int y), (3,3)
Point2::~Point2(), (3,3)
Point2::~Point2(), (5,5)
Point2::~Point2(), (3379952,3211460) 从输出来看,哪怕使用shared_ptr来作为Add函数的返回值,仍然无济于事;对象仍然被删除了两次;
针对这种情况,shared_ptr的解决方案是: enable_shared_from_this这个模版类。所有需要在内部传递this指针的类,都从enable_shared_from_this继承;在需要传递this的时候,使用其成员函数shared_from_this()来返回一个shared_ptr。运用这种方案,我们改良我们的Point类,得到如下的Point3:
class Point3 : public enable_shared_from_this
{
public:
Point3() : X(0), Y(0) { cout << "Point3::Point3(), (" << X << "," << Y << ")" << endl; }
Point3(int x, int y) : X(x), Y(y) { cout << "Point3::Point3(int x, int y), (" << X << "," << Y << ")" << endl; }
~Point3() { cout << "Point3::~Point3(), (" << X << "," << Y << ")" << endl; }
public:
shared_ptr Add(const Point3* rhs) { X += rhs->X; Y += rhs->Y; return shared_from_this();}
private:
int X;
int Y;
};
void TestPoint3Add()
{
cout << endl << "TestPoint3Add() >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>" << endl;
shared_ptr p1( new Point3(2,2) );
shared_ptr p2( new Point3(3,3) );
p2.swap( p1->Add(p2.get()) );
}
输出为:
TestPoint3Add() >>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>>
Point3::Point3(int x, int y), (2,2)
Point3::Point3(int x, int y), (3,3)
Point3::~Point3(), (3,3)
Point3::~Point3(), (5,5) 从这个输出可以看出,在这里的对象析构已经变得正常。因此,在类内部需要传递this的场景下,enable_shared_from_this是一个比较靠谱的方案;只不过,要谨慎的记住,使用该方案的一个前提,就是类的对象已经被shared_ptr管理,否则,就等着抛异常吧。例如:
Point3 p1(10, 10);
Point3 p2(20, 20);
p1.Add( &p2 ); //此处抛异常于是,shared_ptr又引入了注意事项:
- 若要在内部传递this,请考虑从enable_shared_from_this继承
- 若从enable_shared_from_this继承,则类对象必须让shared_ptr接管。
- 如果要使用智能指针,那么就要保持一致,统统使用智能智能,尽量减少raw pointer裸指针的使用。
好嘛,到最后,再做一个总结:
- C++没有垃圾收集,资源管理需要自己来做。
- 智能指针可以部分解决资源管理的工作,但是不是万能的。
- 使用智能指针的时候,每个shared_ptr对象都应该有一个名字;也就是避免在一个表达式内做多个资源的初始化;
- 避免shared_ptr的交叉引用;使用weak_ptr打破交叉;
- 使用enable_shared_from_this机制来把this从类内部传递出来;
- 资源管理保持统一风格,要么使用智能指针,要么就全部自己管理裸指针;