1. canny.h
#ifndef _CANNY_
#define _CANNY_
#include "CImg.h"
#include
using namespace std;
using namespace cimg_library;
class canny {
private:
CImg img; //Original Image
CImg grayscaled; // Grayscale
CImg gFiltered; // Gradient
CImg sFiltered; //Sobel Filtered
CImg angles; //Angle Map
CImg non; // Non-maxima supp.
CImg thres; //Double threshold and final
public:
canny(char const*); //Constructor
CImg toGrayScale();
vector > createFilter(int, int, double); //Creates a gaussian filter
CImg useFilter(CImg, vector >); //Use some filter
CImg sobel(); //Sobel filtering
CImg nonMaxSupp(); //Non-maxima supp.
CImg threshold(CImg, int, int); //Double threshold and finalize picture
};
#endif
2. canny.cpp
Z
#define _USE_MATH_DEFINES
#include "canny.h"
#include
#include
using namespace std;
canny::canny(char const* filename)
{
CImg temp(filename);
img = temp;
if (0) // Check for invalid input
{
cout << "Could not open or find the image" << std::endl;
}
else
{
vector > filter = createFilter(3, 3, 1);
//Print filter
for (int i = 0; i canny::toGrayScale() {
grayscaled = CImg(img.rows, img.cols, 1); // one channel
cimg_forXY(img, x, y)
{
int b = img(x, y, 0);
int g = img(x, y, 1);
int r = img(x, y, 2);
double newValue = (r * 0.2126 + g * 0.7152 + b * 0.0722);
grayscaled(x, y) = newValue;
}
return grayscaled;
}
vector> canny::createFilter(int row, int column, double sigmaIn)
{
vector> filter(row, vectordouble(col, -1));
int row = img.row;
int col = img.col;
float coordSum = 0;
float constant = 2.0 * sigmaIn * sigmaIn;
// Sum is for normalization
float sum = 0.0;
for (int x = - row/2; x <= row/2; x++)
{
for (int y = -column/2; y <= column/2; y++)
{
coordSum = (x*x + y*y);
filter[x + row/2][y + column/2] = (exp(-(coordSum) / constant)) / (M_PI * constant);
sum += filter[x + row/2][y + column/2];
}
}
// Normalize the Filter
for (int i = 0; i < row; i++)
for (int j = 0; j < column; j++)
filter[i][j] /= sum;
return filter;
}
CImg canny::useFilter(CImg img_in, vector> filterIn)
{
int size = (int)filterIn.size()/2;
CImg filteredImg = CImg(img_in.rows - 2*size, img_in.cols - 2*size, 1);
for (int i = size; i < img_in.rows - size; i++)
{
for (int j = size; j < img_in.cols - size; j++)
{
double sum = 0;
for (int x = 0; x < filterIn.size(); x++)
for (int y = 0; y < filterIn.size(); y++)
{
sum += filterIn[x][y] * (double)(img_in(i + x - size, j + y - size));
}
filteredImg(i-size, j-size) = sum;
}
}
return filteredImg;
}
CImg canny::sobel()
{
//Sobel X Filter
double x1[] = {-1.0, 0, 1.0};
double x2[] = {-2.0, 0, 2.0};
double x3[] = {-1.0, 0, 1.0};
vector> xFilter(3);
xFilter[0].assign(x1, x1+3);
xFilter[1].assign(x2, x2+3);
xFilter[2].assign(x3, x3+3);
//Sobel Y Filter
double y1[] = {1.0, 2.0, 1.0};
double y2[] = {0, 0, 0};
double y3[] = {-1.0, -2.0, -1.0};
vector> yFilter(3);
yFilter[0].assign(y1, y1+3);
yFilter[1].assign(y2, y2+3);
yFilter[2].assign(y3, y3+3);
//Limit Size
int size = (int)xFilter.size()/2;
CImg filteredImg = CImg(gFiltered.rows - 2*size, gFiltered.cols - 2*size);
angles = CImg(gFiltered.rows - 2*size, gFiltered.cols - 2*size, 1); //AngleMap
for (int i = size; i < gFiltered.rows - size; i++)
{
for (int j = size; j < gFiltered.cols - size; j++)
{
double sumx = 0;
double sumy = 0;
for (int x = 0; x < xFilter.size(); x++)
for (int y = 0; y < xFilter.size(); y++)
{
sumx += xFilter[x][y] * (double)(gFiltered(i + x - size, j + y - size)); //Sobel_X Filter Value
sumy += yFilter[x][y] * (double)(gFiltered(i + x - size, j + y - size)); //Sobel_Y Filter Value
}
double sumxsq = sumx*sumx;
double sumysq = sumy*sumy;
double sq2 = sqrt(sumxsq + sumysq);
if(sq2 > 255) //Unsigned Char Fix
sq2 =255;
filteredImg(i-size, j-size) = sq2;
if(sumx==0) //Arctan Fix
angles(i-size, j-size) = 90;
else
angles(i-size, j-size) = atan(sumy/sumx);
}
}
return filteredImg;
}
CImg canny::nonMaxSupp()
{
CImg nonMaxSupped = CImg(sFiltered.rows-2, sFiltered.cols-2, CV_8UC1);
for (int i=1; i(i,j-1)))
nonMaxSupped(i-1, j-1) = 0;
}
//Vertical Edge
if (((-112.5 < Tangent) && (Tangent <= -67.5)) || ((67.5 < Tangent) && (Tangent <= 112.5)))
{
if ((sFiltered.at(i,j) < sFiltered(i+1,j)) || (sFiltered(i,j) < sFiltered(i-1,j)))
nonMaxSupped.at(i-1, j-1) = 0;
}
//-45 Degree Edge
if (((-67.5 < Tangent) && (Tangent <= -22.5)) || ((112.5 < Tangent) && (Tangent <= 157.5)))
{
if ((sFiltered(i,j) < sFiltered(i-1,j+1)) || (sFiltered(i,j) < sFiltered(i+1,j-1)))
nonMaxSupped.at(i-1, j-1) = 0;
}
//45 Degree Edge
if (((-157.5 < Tangent) && (Tangent <= -112.5)) || ((22.5 < Tangent) && (Tangent <= 67.5)))
{
if ((sFiltered(i,j) < sFiltered(i+1,j+1)) || (sFiltered(i,j) < sFiltered(i-1,j-1)))
nonMaxSupped(i-1, j-1) = 0;
}
}
}
return nonMaxSupped;
}
CImg canny::threshold(CImg imgin,int low, int high)
{
if(low > 255)
low = 255;
if(high > 255)
high = 255;
CImg EdgeMat = CImg(imgin.rows, imgin.cols, imgin.type());
for (int i=0; i high)
EdgeMat(i,j) = 255;
else if(EdgeMat(i,j) < low)
EdgeMat(i,j) = 0;
else
{
bool anyHigh = false;
bool anyBetween = false;
for (int x=i-1; x < i+2; x++)
{
for (int y = j-1; y EdgeMat.cols) //Out of bounds
continue;
else
{
if(EdgeMat(x,y) > high)
{
EdgeMat(i,j) = 255;
anyHigh = true;
break;
}
else if(EdgeMat(x,y) <= high && EdgeMat(x,y) >= low)
anyBetween = true;
}
}
if(anyHigh)
break;
}
if(!anyHigh && anyBetween)
for (int x=i-2; x < i+3; x++)
{
for (int y = j-1; y EdgeMat.rows || y > EdgeMat.cols) //Out of bounds
continue;
else
{
if(EdgeMat(x,y) > high)
{
EdgeMat(i,j) = 255;
anyHigh = true;
break;
}
}
}
if(anyHigh)
break;
}
if(!anyHigh)
EdgeMat(i,j) = 0;
}
}
}
return EdgeMat;
}
3. 运行效果
3.1 lena


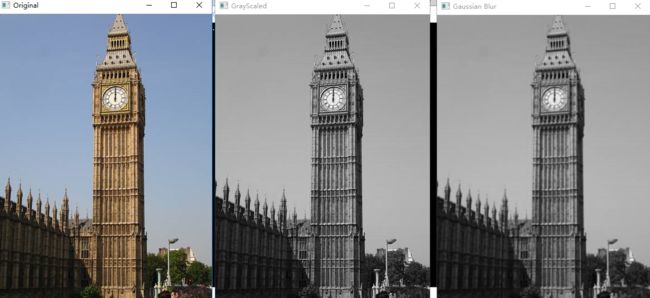
3.2 bigben

3.3 stpetro



3.4 twows

4. 参数说明
4.1 toGrayScale
主要在于double newValue = (r * 0.2126 + g * 0.7152 + b * 0.0722);这句话,把每个点转为灰色
4.2 高斯模糊
首先调用createFilter生成卷积核,再用useFilter对图像进行卷积
4.3 sobel
用Gx和Gy两个卷积核对图像进行卷积,得到梯度变化大的边界。再用非极大值抑制法剔除非边缘的点。
4.4 双阈值法
剔除那些梯度变化过小或过大的点,以消除噪声