基于树莓派3的CAN总线编程
简介
树莓派3使用Python控制SPI接口的MCP2515 CAN模块。实现命令行控制CAN的收发。
github地址

环境搭建
- Raspiberry Pi Model 3B 安装Raspbian,并使能SPI功能(默认关闭)
- python2.7
- spidev-3.2(如有更新,下载最新版本)
- MCP2515模块(SPI接口)
使用说明
共mcp2515.py和mcp2515_run.py两个文件,放在同一目录下,运行mcp2515_run.py。
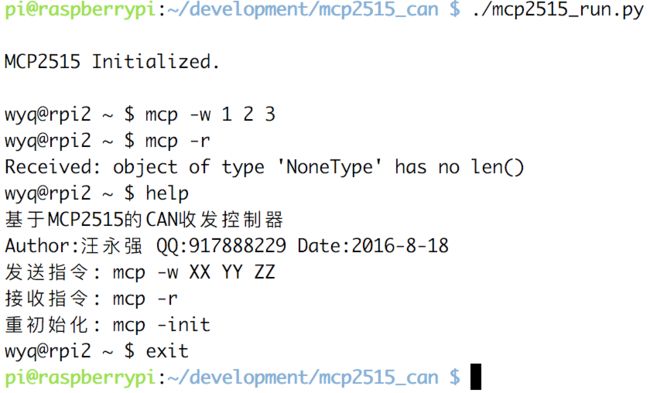
如上图所示,命令行支持如下命令:
mcp -init //初始化,自动调用
mcp -w 1 2 3 //发送数据,这里发送了3个字节:0x01,0x02,0x03
mcp -r //读取接收缓冲区,示例中没有收到数据,为空
help //帮助信息
exit //退出命令行
源代码
mcp2515_run.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
import spidev,time
import sys,cmd,shlex,types
from mcp2515 import *
spi = spidev.SpiDev(0,0)
def mcp2515_reset():
tmpc = [0xc0]
spi.writebytes(tmpc)
def mcp2515_writeReg(addr, val):
buf = [0x02, addr, val]
spi.writebytes(buf)
def mcp2515_readReg(addr):
buf = [0x03, addr, 0x55]
buf = spi.xfer2(buf)
return int(buf[2])
def mcp2515_init():
mcp2515_reset()
time.sleep(2)
#设置波特率为125Kbps
#set CNF1,SJW=00,长度为1TQ,BRP=49,TQ=[2*(BRP+1)]/Fsoc=2*50/8M=12.5us
mcp2515_writeReg(CNF1,CAN_125Kbps);
#set CNF2,SAM=0,在采样点对总线进行一次采样,PHSEG1=(2+1)TQ=3TQ,PRSEG=(0+1)TQ=1TQ
mcp2515_writeReg(CNF2,0x80|PHSEG1_3TQ|PRSEG_1TQ);
#set CNF3,PHSEG2=(2+1)TQ=3TQ,同时当CANCTRL.CLKEN=1时设定CLKOUT引脚为时间输出使能位
mcp2515_writeReg(CNF3,PHSEG2_3TQ);
mcp2515_writeReg(TXB0SIDH,0xFF)#发送缓冲器0标准标识符高位
mcp2515_writeReg(TXB0SIDL,0xEB)#发送缓冲器0标准标识符低位(第3位为发送拓展标识符使能位)
mcp2515_writeReg(TXB0EID8,0xFF)#发送缓冲器0拓展标识符高位
mcp2515_writeReg(TXB0EID0,0xFF)#发送缓冲器0拓展标识符低位
mcp2515_writeReg(RXB0SIDH,0x00)#清空接收缓冲器0的标准标识符高位
mcp2515_writeReg(RXB0SIDL,0x00)#清空接收缓冲器0的标准标识符低位
mcp2515_writeReg(RXB0EID8,0x00)#清空接收缓冲器0的拓展标识符高位
mcp2515_writeReg(RXB0EID0,0x00)#清空接收缓冲器0的拓展标识符低位
mcp2515_writeReg(RXB0CTRL,0x40)#仅仅接收拓展标识符的有效信息
mcp2515_writeReg(RXB0DLC,DLC_8)#设置接收数据的长度为8个字节
mcp2515_writeReg(RXF0SIDH,0xFF)#配置验收滤波寄存器n标准标识符高位
mcp2515_writeReg(RXF0SIDL,0xEB)#配置验收滤波寄存器n标准标识符低位(第3位为接收拓展标识符使能位)
mcp2515_writeReg(RXF0EID8,0xFF)#配置验收滤波寄存器n拓展标识符高位
mcp2515_writeReg(RXF0EID0,0xFF)#配置验收滤波寄存器n拓展标识符低位
mcp2515_writeReg(RXM0SIDH,0xFF)#配置验收屏蔽寄存器n标准标识符高位
mcp2515_writeReg(RXM0SIDL,0xE3)#配置验收屏蔽寄存器n标准标识符低位
mcp2515_writeReg(RXM0EID8,0xFF)#配置验收滤波寄存器n拓展标识符高位
mcp2515_writeReg(RXM0EID0,0xFF)#配置验收滤波寄存器n拓展标识符低位
mcp2515_writeReg(CANINTF,0x00)#清空CAN中断标志寄存器的所有位(必须由MCU清空)
mcp2515_writeReg(CANINTE,0x01)#配置CAN中断使能寄存器的接收缓冲器0满中断使能,其它位禁止中断
mcp2515_writeReg(CANCTRL,REQOP_NORMAL|CLKOUT_ENABLED)#将MCP2515设置为正常模式,退出配置模式
#tmpc = mcp2515_readReg(CANSTAT)#读取CAN状态寄存器的值
#tmpd = int(tmpc[0]) & 0xe0
#if OPMODE_NORMAL!=tmpd:#判断MCP2515是否已经进入正常模式
# mcp2515_writeReg(CANCTRL,REQOP_NORMAL|CLKOUT_ENABLED)#再次将MCP2515设置为XX模式,退出配置模式
print '\r\nMCP2515 Initialized.\r\n'
def mcp2515_write(buf):
for i in range(50):
time.sleep(2) #通过软件延时约nms(不准确)
if not mcp2515_readReg(TXB0CTRL)&0x08:#快速读某些状态指令,等待TXREQ标志清零
break
N = len(buf)
for j in range(N):
mcp2515_writeReg(TXB0D0+j,buf[j])#将待发送的数据写入发送缓冲寄存器
mcp2515_writeReg(TXB0DLC,N)#将本帧待发送的数据长度写入发送缓冲器0的发送长度寄存器
mcp2515_writeReg(TXB0CTRL,0x08)#请求发送报文
def mcp2515_read():
N = 0
buf = []
if mcp2515_readReg(CANINTF) & 0x01:
N = mcp2515_readReg(RXB0DLC)#读取接收缓冲器0接收到的数据长度(0~8个字节)
for i in range(N):
buf.append(mcp2515_readReg(RXB0D0+i))#把CAN接收到的数据放入指定缓冲区
mcp2515_writeReg(CANINTF,0)#清除中断标志位(中断标志寄存器必须由MCU清零)
return buf
class MyCmd(cmd.Cmd):
def __init__(self):
cmd.Cmd.__init__(self)
self.prompt='wyq@rpi2 ~ $ '
mcp2515_init()
def emptyline(self):
pass
def do_test(self,arg):
lex = shlex.shlex(arg)
for x in lex:
print x
def do_exit(self,arg):
return True
def do_mcp(self,arg):
lex = shlex.shlex(arg)
try:
for x in lex:
if x=='-':
opt = lex.next()
if opt.lower()=='init':
mcp2515_init()
elif opt.lower()=='w':
buf = []
for i in lex:
buf.append(int(i))
mcp2515_write(buf)
elif opt.lower()=='r':
buf = mcp2515_read()
print 'Received:',len(buf)
for i in buf:
print hex(int(i))
else:
pass
except BaseException, e:
print e
def do_help(self,arg):
print '基于MCP2515的CAN收发控制器'
print 'Author:汪永强 QQ:917888229 Date:2016-8-18'
print '发送指令: mcp -w XX YY ZZ'
print '接收指令: mcp -r'
print '重初始化: mcp -init'
if __name__=='__main__':
mycmd = MyCmd()
mycmd.cmdloop()
mcp2515.py
#!/usr/bin/env python
# -*- coding: utf-8 -*-
#/* Configuration Registers */
CANSTAT = 0x0E
CANCTRL = 0x0F
BFPCTRL = 0x0C
TEC = 0x1C
REC = 0x1D
CNF3 = 0x28
CNF2 = 0x29
CNF1 = 0x2A
CANINTE = 0x2B
CANINTF = 0x2C
EFLG = 0x2D
TXRTSCTRL = 0x0D
#/* Recieve Filters */
RXF0SIDH = 0x00
RXF0SIDL = 0x01
RXF0EID8 = 0x02
RXF0EID0 = 0x03
RXF1SIDH = 0x04
RXF1SIDL = 0x05
RXF1EID8 = 0x06
RXF1EID0 = 0x07
RXF2SIDH = 0x08
RXF2SIDL = 0x09
RXF2EID8 = 0x0A
RXF2EID0 = 0x0B
RXF3SIDH = 0x10
RXF3SIDL = 0x11
RXF3EID8 = 0x12
RXF3EID0 = 0x13
RXF4SIDH = 0x14
RXF4SIDL = 0x15
RXF4EID8 = 0x16
RXF4EID0 = 0x17
RXF5SIDH = 0x18
RXF5SIDL = 0x19
RXF5EID8 = 0x1A
RXF5EID0 = 0x1B
#/* Receive Masks */
RXM0SIDH = 0x20
RXM0SIDL = 0x21
RXM0EID8 = 0x22
RXM0EID0 = 0x23
RXM1SIDH = 0x24
RXM1SIDL = 0x25
RXM1EID8 = 0x26
RXM1EID0 = 0x27
#/* Tx Buffer 0 */
TXB0CTRL = 0x30
TXB0SIDH = 0x31
TXB0SIDL = 0x32
TXB0EID8 = 0x33
TXB0EID0 = 0x34
TXB0DLC = 0x35
TXB0D0 = 0x36
TXB0D1 = 0x37
TXB0D2 = 0x38
TXB0D3 = 0x39
TXB0D4 = 0x3A
TXB0D5 = 0x3B
TXB0D6 = 0x3C
TXB0D7 = 0x3D
#/* Tx Buffer 1 */
TXB1CTRL = 0x40
TXB1SIDH = 0x41
TXB1SIDL = 0x42
TXB1EID8 = 0x43
TXB1EID0 = 0x44
TXB1DLC = 0x45
TXB1D0 = 0x46
TXB1D1 = 0x47
TXB1D2 = 0x48
TXB1D3 = 0x49
TXB1D4 = 0x4A
TXB1D5 = 0x4B
TXB1D6 = 0x4C
TXB1D7 = 0x4D
#/* Tx Buffer 2 */
TXB2CTRL = 0x50
TXB2SIDH = 0x51
TXB2SIDL = 0x52
TXB2EID8 = 0x53
TXB2EID0 = 0x54
TXB2DLC = 0x55
TXB2D0 = 0x56
TXB2D1 = 0x57
TXB2D2 = 0x58
TXB2D3 = 0x59
TXB2D4 = 0x5A
TXB2D5 = 0x5B
TXB2D6 = 0x5C
TXB2D7 = 0x5D
#/* Rx Buffer 0 */
RXB0CTRL = 0x60
RXB0SIDH = 0x61
RXB0SIDL = 0x62
RXB0EID8 = 0x63
RXB0EID0 = 0x64
RXB0DLC = 0x65
RXB0D0 = 0x66
RXB0D1 = 0x67
RXB0D2 = 0x68
RXB0D3 = 0x69
RXB0D4 = 0x6A
RXB0D5 = 0x6B
RXB0D6 = 0x6C
RXB0D7 = 0x6D
#/* Rx Buffer 1 */
RXB1CTRL = 0x70
RXB1SIDH = 0x71
RXB1SIDL = 0x72
RXB1EID8 = 0x73
RXB1EID0 = 0x74
RXB1DLC = 0x75
RXB1D0 = 0x76
RXB1D1 = 0x77
RXB1D2 = 0x78
RXB1D3 = 0x79
RXB1D4 = 0x7A
RXB1D5 = 0x7B
RXB1D6 = 0x7C
RXB1D7 = 0x7D
#/*******************************************************************
# * Bit register masks *
# *******************************************************************/
#/* TXBnCTRL */
TXREQ = 0x08
TXP = 0x03
#/* RXBnCTRL */
RXM = 0x60
BUKT = 0x04
#/* CANCTRL */
REQOP = 0xE0
ABAT = 0x10
OSM = 0x08
CLKEN = 0x04
CLKPRE = 0x03
#/* CANSTAT */
REQOP = 0xE0
ICOD = 0x0E
#/* CANINTE */
RX0IE = 0x01
RX1IE = 0x02
TX0IE = 0x04
TX1IE = 0x80
TX2IE = 0x10
ERRIE = 0x20
WAKIE = 0x40
MERRE = 0x80
#/* CANINTF */
RX0IF = 0x01
RX1IF = 0x02
TX0IF = 0x04
TX1IF = 0x80
TX2IF = 0x10
ERRIF = 0x20
WAKIF = 0x40
MERRF = 0x80
#/* BFPCTRL */
B1BFS = 0x20
B0BFS = 0x10
B1BFE = 0x08
B0BFE = 0x04
B1BFM = 0x02
B0BFM = 0x01
#/* CNF1 Masks */
SJW = 0xC0
BRP = 0x3F
#/* CNF2 Masks */
BTLMODE = 0x80
SAM = 0x40
PHSEG1 = 0x38
PRSEG = 0x07
#/* CNF3 Masks */
WAKFIL = 0x40
PHSEG2 = 0x07
#/* TXRTSCTRL Masks */
TXB2RTS = 0x04
TXB1RTS = 0x02
TXB0RTS = 0x01
#/*******************************************************************
# * Bit Timing Configuration *
# *******************************************************************/
#/* CNF1 */
SJW_1TQ = 0x40
SJW_2TQ = 0x80
SJW_3TQ = 0x90
SJW_4TQ = 0xC0
#/* CNF2 */
BTLMODE_CNF3 = 0x80
BTLMODE_PH1_IPT = 0x00
SMPL_3X = 0x40
SMPL_1X = 0x00
PHSEG1_8TQ = 0x38
PHSEG1_7TQ = 0x30
PHSEG1_6TQ = 0x28
PHSEG1_5TQ = 0x20
PHSEG1_4TQ = 0x18
PHSEG1_3TQ = 0x10
PHSEG1_2TQ = 0x08
PHSEG1_1TQ = 0x00
PRSEG_8TQ = 0x07
PRSEG_7TQ = 0x06
PRSEG_6TQ = 0x05
PRSEG_5TQ = 0x04
PRSEG_4TQ = 0x03
PRSEG_3TQ = 0x02
PRSEG_2TQ = 0x01
PRSEG_1TQ = 0x00
#/* CNF3 */
PHSEG2_8TQ = 0x07
PHSEG2_7TQ = 0x06
PHSEG2_6TQ = 0x05
PHSEG2_5TQ = 0x04
PHSEG2_4TQ = 0x03
PHSEG2_3TQ = 0x02
PHSEG2_2TQ = 0x01
PHSEG2_1TQ = 0x00
SOF_ENABLED = 0x80
WAKFIL_ENABLED = 0x40
WAKFIL_DISABLED = 0x00
#/*******************************************************************
# * Control/Configuration Registers *
# *******************************************************************/
#/* CANINTE */
RX0IE_ENABLED = 0x01
RX0IE_DISABLED = 0x00
RX1IE_ENABLED = 0x02
RX1IE_DISABLED = 0x00
G_RXIE_ENABLED = 0x03
G_RXIE_DISABLED = 0x00
TX0IE_ENABLED = 0x04
TX0IE_DISABLED = 0x00
TX1IE_ENABLED = 0x08
TX2IE_DISABLED = 0x00
TX2IE_ENABLED = 0x10
TX2IE_DISABLED = 0x00
G_TXIE_ENABLED = 0x1C
G_TXIE_DISABLED = 0x00
ERRIE_ENABLED = 0x20
ERRIE_DISABLED = 0x00
WAKIE_ENABLED = 0x40
WAKIE_DISABLED = 0x00
IVRE_ENABLED = 0x80
IVRE_DISABLED = 0x00
#/* CANINTF */
RX0IF_SET = 0x01
RX0IF_RESET = 0x00
RX1IF_SET = 0x02
RX1IF_RESET = 0x00
TX0IF_SET = 0x04
TX0IF_RESET = 0x00
TX1IF_SET = 0x08
TX2IF_RESET = 0x00
TX2IF_SET = 0x10
TX2IF_RESET = 0x00
ERRIF_SET = 0x20
ERRIF_RESET = 0x00
WAKIF_SET = 0x40
WAKIF_RESET = 0x00
IVRF_SET = 0x80
IVRF_RESET = 0x00
#/* CANCTRL */
REQOP_CONFIG = 0x80
REQOP_LISTEN = 0x60
REQOP_LOOPBACK = 0x40
REQOP_SLEEP = 0x20
REQOP_NORMAL = 0x00
ABORT = 0x10
OSM_ENABLED = 0x08
CLKOUT_ENABLED = 0x04
CLKOUT_DISABLED = 0x00
CLKOUT_PRE_8 = 0x03
CLKOUT_PRE_4 = 0x02
CLKOUT_PRE_2 = 0x01
CLKOUT_PRE_1 = 0x00
#/* CANSTAT */
OPMODE_CONFIG = 0x80
OPMODE_LISTEN = 0x60
OPMODE_LOOPBACK = 0x40
OPMODE_SLEEP = 0x20
OPMODE_NORMAL = 0x00
#/* RXBnCTRL */
RXM_RCV_ALL = 0x60
RXM_VALID_EXT = 0x40
RXM_VALID_STD = 0x20
RXM_VALID_ALL = 0x00
RXRTR_REMOTE = 0x08
RXRTR_NO_REMOTE = 0x00
BUKT_ROLLOVER = 0x04
BUKT_NO_ROLLOVER = 0x00
FILHIT0_FLTR_1 = 0x01
FILHIT0_FLTR_0 = 0x00
FILHIT1_FLTR_5 = 0x05
FILHIT1_FLTR_4 = 0x04
FILHIT1_FLTR_3 = 0x03
FILHIT1_FLTR_2 = 0x02
FILHIT1_FLTR_1 = 0x01
FILHIT1_FLTR_0 = 0x00
#/* TXBnCTRL */
TXREQ_SET = 0x08
TXREQ_CLEAR = 0x00
TXP_HIGHEST = 0x03
TXP_INTER_HIGH = 0x02
TXP_INTER_LOW = 0x01
TXP_LOWEST = 0x00
#/*******************************************************************
# * Register Bit Masks *
# *******************************************************************/
DLC_0 = 0x00
DLC_1 = 0x01
DLC_2 = 0x02
DLC_3 = 0x03
DLC_4 = 0x04
DLC_5 = 0x05
DLC_6 = 0x06
DLC_7 = 0x07
DLC_8 = 0x08
#/*******************************************************************
# * CAN SPI commands *
# *******************************************************************/
CAN_RESET = 0xC0
CAN_READ = 0x03
CAN_WRITE = 0x02
CAN_RTS = 0x80
CAN_RTS_TXB0 = 0x81
CAN_RTS_TXB1 = 0x82
CAN_RTS_TXB2 = 0x84
CAN_RD_STATUS = 0xA0
CAN_BIT_MODIFY = 0x05
CAN_RX_STATUS = 0xB0
CAN_RD_RX_BUFF = 0x90
CAN_LOAD_TX = 0x40
#/*******************************************************************
# * Miscellaneous *
# *******************************************************************/
DUMMY_BYTE = 0x00
TXB0 = 0x31
TXB1 = 0x41
TXB2 = 0x51
RXB0 = 0x61
RXB1 = 0x71
EXIDE_SET = 0x08
EXIDE_RESET = 0x00
#MCP2515波特率预分频
CAN_10Kbps = 0x31
CAN_25Kbps = 0x13
CAN_50Kbps = 0x09
CAN_100Kbps = 0x04
CAN_125Kbps = 0x03
CAN_250Kbps = 0x01
CAN_500Kbps = 0x00