OpenCV学习三十四:watershed 分水岭算法
1. watershed
void watershed( InputArray image, InputOutputArray markers );
第一个参数 image,必须是一个8bit 3通道彩色图像矩阵序列,第一个参数没什么要说的。
关键是第二个参数 markers:在执行分水岭函数watershed之前,必须对第二个参数markers进行处理,它应该包含不同区域的轮廓,每个轮廓有一个自己唯一的编号,轮廓的定位可以通过Opencv中findContours方法实现,这个是执行分水岭之前的要求。
接下来执行分水岭会发生什么呢?算法会根据markers传入的轮廓作为种子(也就是所谓的注水点),对图像上其他的像素点根据分水岭算法规则进行判断,并对每个像素点的区域归属进行划定,直到处理完图像上所有像素点。而区域与区域之间的分界处的值被置为“-1”,以做区分。
简单概括一下就是说第二个入参markers必须包含了种子点信息。Opencv官方例程中使用鼠标划线标记,其实就是在定义种子,只不过需要手动操作,而使用findContours可以自动标记种子点。而分水岭方法完成之后并不会直接生成分割后的图像,还需要进一步的显示处理,如此看来,只有两个参数的watershed其实并不简单。
2. 步骤
- 1. 将白色背景编程黑色背景 - 目的是为了后面变的变换做准备
- 2. 使用filter2D与拉普拉斯算子实现图像对比度的提高 - sharp
- 3. 转为二值图像通过threshold
- 4. 距离变换
- 5. 对距离变换结果进行归一化[0-1]之间
- 6. 使用阈值,在此二值化,得到标记
- 7. 腐蚀每个peak erode
- 8. 发现轮廓 findContours
- 9. 绘制轮廓 drawContours
- 10.分水岭变换 watershed
- 11.对每个分割区域着色输出结果
我觉得教程的思路有点过于啰嗦~
3. 代码及结果
#include
#include
using namespace cv;
using namespace std;
int main(int argc, char* argv[]){
char input_win[] = "input image";
char watershed_win[] = "watershed segementation demo";
Mat src = imread("10.jpg", -1);
resize(src, src, Size(), 0.25, 0.25, 1);
if (src.empty()){
puts("could not load images");
return -1; }
namedWindow(input_win, CV_WINDOW_AUTOSIZE);
imshow(input_win, src);
//1. 将白色背景编程黑色背景 - 目的是为了后面变的变换做准备
for (int row=0; row(row, col) == Vec3b(255, 255, 255)){
//我这里和视频教程图片不一样,所以这一步不同
// src.at(row, col)[0] = 0;
// src.at(row, col)[1] = 0;
// src.at(row, col)[2] = 0;
}
}
}
namedWindow("black background", CV_WINDOW_AUTOSIZE);
imshow("black background", src);
imwrite("black background.jpg", src);
//2. 使用filter2D与拉普拉斯算子实现图像对比度的提高 - sharp
Mat kernel1 = (Mat_(3, 3)<<1,1,1, 1,-8, 1, 1,1,1) ;
Mat imgLaplance;
Mat imgSharpen;
filter2D(src, imgLaplance, CV_32F, kernel1, Point(-1,-1), 0, BORDER_DEFAULT);
src.convertTo(imgSharpen, CV_32F);
Mat imgResult = imgSharpen - imgLaplance;
imgResult.convertTo(imgResult, CV_8UC3);
imgLaplance.convertTo(imgLaplance, CV_8UC3);
imshow("sharpen img", imgResult);
imwrite("sharpen img.jpg", imgResult);
//3. 转为二值图像通过threshold
Mat imgBinary;
cvtColor(imgResult, imgResult, CV_BGR2GRAY);
threshold(imgResult, imgBinary, 40, 255, THRESH_BINARY | THRESH_OTSU);
Mat temp;
imgBinary.copyTo(temp, Mat());
Mat kernel2 = getStructuringElement(MORPH_RECT, Size(2,2), Point(-1, -1));
morphologyEx(temp, temp, CV_MOP_TOPHAT, kernel2, Point(-1, -1), 1);
for (int row=0; row(row, col) = saturate_cast(imgBinary.at(row, col) - temp.at(row, col));
}
}
imshow("sharpen img", imgResult);
imshow("binary img", imgBinary);
imwrite("sharpen img2.jpg", imgResult);
imwrite("binary.jpg", imgBinary);
//4. 距离变换
Mat imgDist;
distanceTransform(imgBinary, imgDist, CV_DIST_L1, 3);
//5. 对距离变换结果进行归一化[0-1]之间
normalize(imgDist, imgDist, 0, 1, NORM_MINMAX);
imshow("distance result normalize", imgDist);
imwrite("distance result normalize.jpg", imgDist);
//6. 使用阈值,在此二值化,得到标记
threshold(imgDist, imgDist, 0.5, 1, CV_THRESH_BINARY);
imshow("distance result threshold", imgDist);
imwrite("distance result threshold.jpg", imgDist);
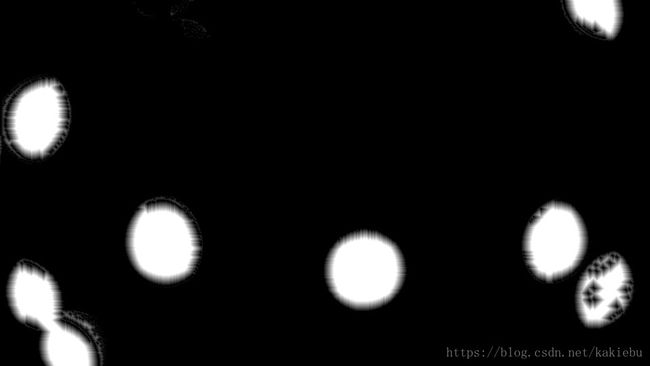
//7. 腐蚀每个peak erode
Mat kernel3 = Mat::zeros(15, 15, CV_8UC1);
erode(imgDist, imgDist, kernel3, Point(-1,-1), 2);
imshow("distance result erode", imgDist);
imwrite("distance result erode.jpg", imgDist);
//8. 发现轮廓 findContours
Mat imgDist8U;
imgDist.convertTo(imgDist8U, CV_8U);
vector> contour;
findContours(imgDist8U, contour, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE, Point(0, 0));
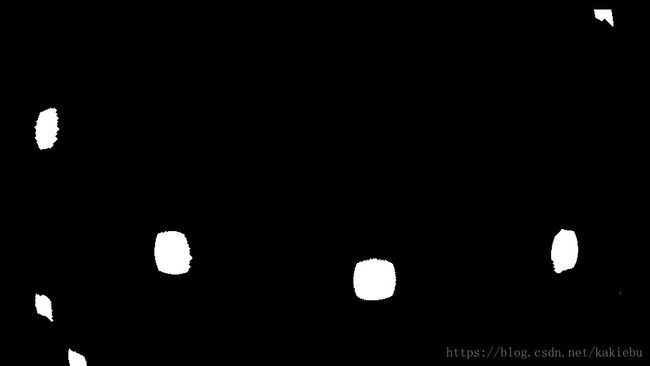
//9. 绘制轮廓 drawContours
Mat maskers = Mat::zeros(imgDist8U.size(), CV_32SC1);
for (size_t i=0; i(i), Scalar::all(static_cast(i) + 1)); }
imshow("maskers", maskers);
imwrite("maskers.jpg", maskers);
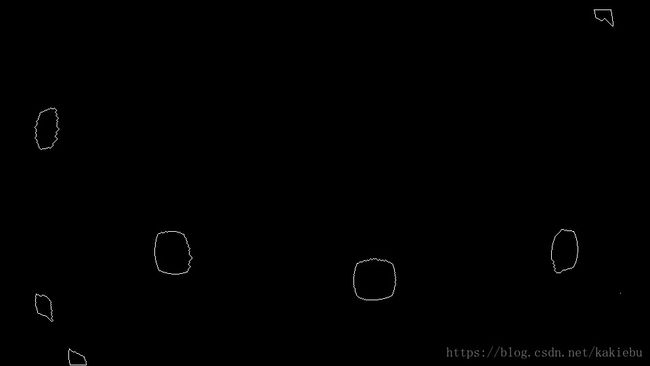
//10.分水岭变换 watershed
watershed(src, maskers);
Mat mark = Mat::zeros(maskers.size(), CV_8UC1);
maskers.convertTo(mark, CV_8UC1);
bitwise_not(mark, mark, Mat());
imshow("watershed", mark);
imwrite("watershed.jpg", mark);
//11.对每个分割区域着色输出结果
vector colors;
for (size_t i=0; i(row, col);
if (index>0 && index <= static_cast(contour.size())){
dst.at(row,col) = colors[index-1];
} else {
dst.at(row,col) = Vec3b(0,0,0);
}
}
}
imshow("dst", dst);
imwrite("dst.jpg", dst);
waitKey();
return 0;
}
 原图
原图
 black background.jpg
black background.jpg
 sharpen img.jpg
sharpen img.jpg
 sharpen img2.jpg
sharpen img2.jpg
 binary.jpg
binary.jpg
 distance result normalize.jpg
distance result normalize.jpg
备注:为了突出效果,这里放大了1000倍
 distance result threshold.jpg
distance result threshold.jpg
备注:为了突出效果,这里放大了1000倍
 distance result erode.jpg
distance result erode.jpg
备注:为了突出效果,这里放大了1000倍
 maskers.jpg
maskers.jpg
备注:为了突出效果,这里放大了1000倍
 watershed.jpg
watershed.jpg
备注:这个图片并不是全白,只是区分度比较小
 dst.jpg
dst.jpg