点云库PCL学习:提取最小包围盒(AABB、OBB)
提取最小包围盒(AABB、OBB)
- 最小包围盒介绍
- AABB、OBB包围盒的提取
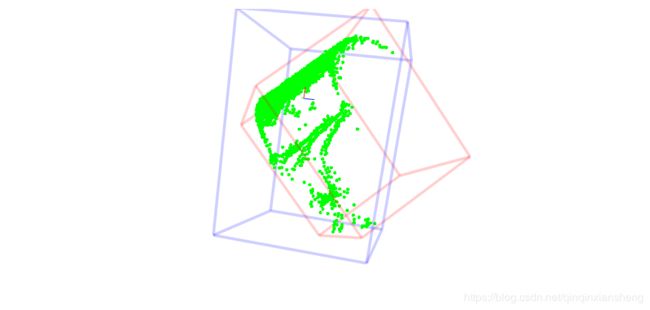
- 提取结果
最小包围盒介绍
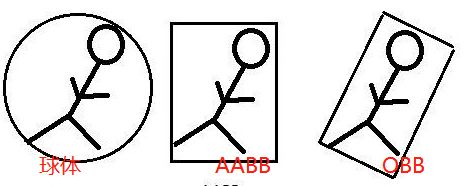
包围盒也叫外接最小矩形,是一种求解离散点集最优包围空间的算法,基本思想是用体积稍大且特性简单的几何体(称为包围盒)来近似地代替复杂的几何对象。
常见的包围盒算法有AABB包围盒、包围球、方向包围盒OBB以及固定方向凸包FDH。碰撞检测问题在虚拟现实、计算机辅助设计与制造、游戏及机器人等领域有着广泛的应用,甚至成为关键技术。而包围盒算法是进行碰撞干涉初步检测的重要方法之一。
AABB、OBB包围盒的提取
#include 提取结果