ur3机械臂sw转urdf文件
ur3机械臂sw转urdf文件
注:网上说SolidWorks2018安装后导出来urdf有bug,模型错位问题,笔者就遇到了这个问题。
笔者配置环境:
SolidWorks2018
1.安装sw_urdf_exporter插件并加载ur3模型
sw_urdf_exporter插件网址:http://wiki.ros.org/sw_urdf_exporter
安装时关闭sw,一路默认安装就可以了.
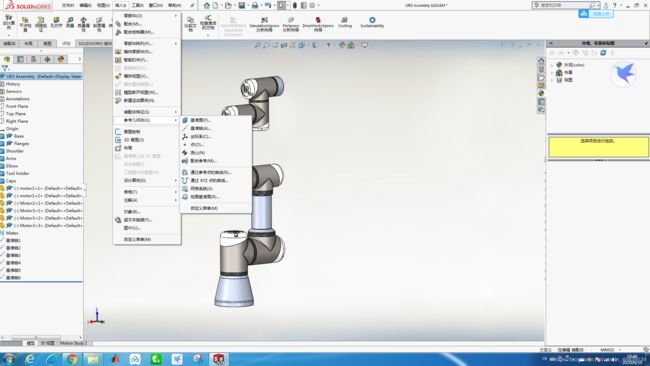
2.插入基准轴
注释:在插入坐标轴后,后边会自动形成坐标系,也可以插入坐标系,以防止生成的坐标系有错误。
以下图方法插入六根基准轴,六根轴也是此六根基准轴
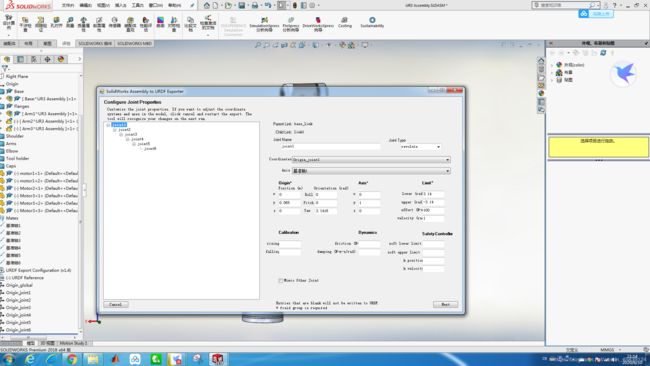
打开工具,在最下边file一栏里有安装好的插件,点开。

在左侧会选择第一个基座,命名base_link。然后点击子连杆数量为1,在下端会生成一个empty_link。

然后点击empty_link,重新命名link1,joint1。并选择绕joint1选择的连杆。旋转轴选择基准轴1,关节类型选择revolut。然后点击子连杆数量为1,在下端会生成一个empty_link。

然后点击empty_link,重新命名link2,joint2。并选择绕joint2选择的连杆。旋转轴选择基准轴,2,关节类型选择revolut。然后点击子连杆数量为1,在下端会生成一个empty_link。

然后点击empty_link,重新命名link3,joint3。并选择绕joint3选择的连杆。旋转轴选择基准轴3,关节类型选择revolut。然后点击子连杆数量为1,在下端会生成一个empty_link。

然后点击empty_link,重新命名link4,joint4。并选择绕joint4选择的连杆。旋转轴选择基准轴4,关节类型选择revolut。然后点击子连杆数量为1,在下端会生成一个empty_link。

然后点击empty_link,重新命名link5,joint5。并选择绕joint5选择的连杆。旋转轴选择基准轴5,关节类型选择revolut。然后点击子连杆数量为1,在下端会生成一个empty_link。

然后点击empty_link,重新命名link6,joint6。并选择绕joint6选择的连杆。旋转轴选择基准轴6,关节类型选择revolut。

六个关节的link和joint都已经配置完成。
然后点击preview the generate URDF and EXPRORT to a URDF package。会进入下边选项模式。在这里可以检查每一个关节的参数,并且设置关节的旋转范围和力和速度。
在limit选项中分别设置每个关节:
1.54
-1.54
100
1



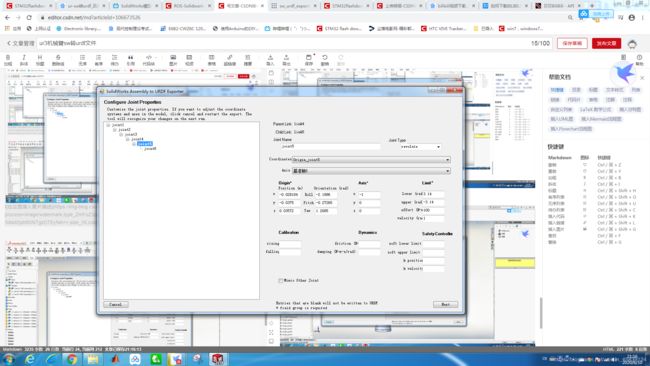


设置完成之后就可以导出来urdf文件。导出来文件可以在ubuntu系统中打开,并且显示出来,然而直接导出来的文件还是不能用的,需要进行几处地方修改。
修改处理
编译错误一:邮箱修改

编译错误二:路径修改

配置好的界面保存下来,点击save,config保存。并确认joint配置是否正确。

修改fales改为ture,可以看到gui。旋转每个关节检查joint配置是否正确。