3D数学笔记——四元数
四元数
在了解四元数旋转之前,先要了解四元数,所以在此对四元数做个简单的讨论。
- 定义
四元数和复数的定义很相似(但是这里并不打算讨论复数,如果有不明白复数的可以进行百度。),唯一的区别就是四元数有3个虚部,而复数只有一个。所有的四元数q都可以写成一下形式:
q = a + bi + cj +dk
其中
![]()
根据该公式得出

与复数类型,因为四元数其实就是对基![]()
 的线性组合,四元数也可以写成向量形式
的线性组合,四元数也可以写成向量形式
- 模长(范数)
仿照复数的定义,我们可以暂时将一个四元数q = a + bi + cj + dk的模长定义为
![]()
还可以表示为 q = [s, v] :

- 加减法
与复数类似,四元数的加法只需要将分量相加就可以了,如果我们有两个四元数q1 = a + bi + cj + dk,q2 = e + f i + gj + hk,那么它们的和为:

减法同理

- 数乘
如果我们有一个四元数 q = a + bi + cj + dk 和一个标量s,那么它们的乘积为:

- 四元数乘法
四元数乘法不遵守交换律,也就是说一般 情况下 ![]() ,这也就有了左乘和右乘的区别,如果是q1q2,那么我们就说[q2左乘以q1],如果是q2q1,那我们就说[q2右乘以q1]. 除了交换律之外,我们经常使用的结合律和分配率在四元数内都是成立的。
,这也就有了左乘和右乘的区别,如果是q1q2,那么我们就说[q2左乘以q1],如果是q2q1,那我们就说[q2右乘以q1]. 除了交换律之外,我们经常使用的结合律和分配率在四元数内都是成立的。
那么如果有两个四元数q1 = a + bi + cj + dk 和 q2 = e + f i + gj + hk,那么它们的乘积为
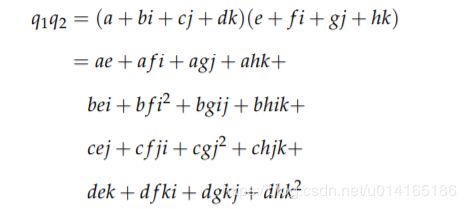
现在我们利用定义中的公式来进行化简

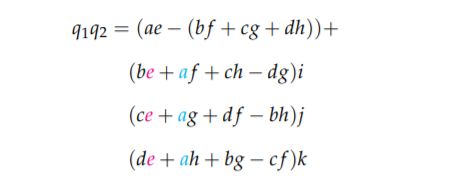
现在我们来把他写成矩阵形式

我们进一步整理公式
注意,如果令 ,
, ,那么
,那么
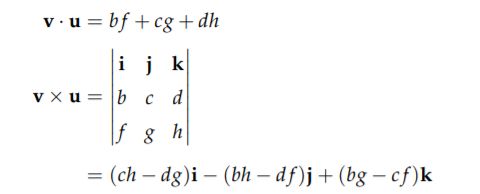
因此q1q2的结果可以用向量点乘和叉乘的形式表示出来

- 纯四元数
在我们正式进入四元数旋转讨论之前,我们还需要更多关于四元数的定义,如果一个四元数能写成这样的形式
![]()
那我们则称v是一个纯四元数,既仅有虚部的四元数,因为纯四元数近有虚部的3D向量决定,我们可以将任意的3D向量转换成纯四元数,在本文中,如果一个3D向量v,那么不加粗、没有上标的 v 则为它对应的纯四元数 v = [0, v].
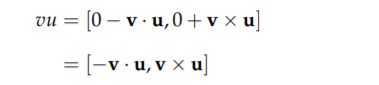
纯四元数有一个很重要的特性:如果有两个纯四元数v = [0, v], u = [0, u],那么
- 逆和共轭
因为四元数是不遵守交换律的,我们通常不会将两个四元数相除写为 p q 的形式.取 而代之的是将乘法的逆运算定义为 pq−1 或者 q −1 p,注意它们的结果一般是不同的. 其中,q −1 是 q 的逆(Inverse),我们规定:

这也就是说:
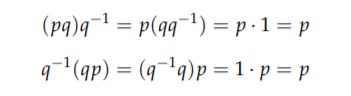
所以,右乘 q 的逆运算为右乘 q −1,左乘 q 的逆运算为左乘 q −1,这个与矩阵的性 质非常相似.
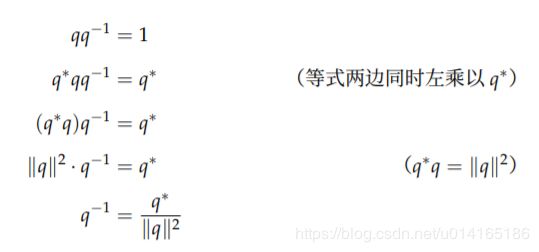
显然,要在无数的四元数中寻找一个满足 qq−1 = q −1 q = 1 的 q −1 是非常困难的, 但是实际上我们可以使用四元数共轭的一些性质来获得 q −1.
我们定义,一个四元数 q = a + bi + ck + dj 的共轭为 q ∗ = a − bi − cj − dk(q ∗ 读作 「q star」).如果用标量向量有序对的形式来定义的话,q = [s, v] 的共轭为 q ∗ = [s, −v]. 共轭四元数的一个非常有用的性质就是: 
可以看到,这最终的结果是一个实数,而它正是四元数模长的平方:

因为 (q ∗ ) ∗ = [s, −(−v)] = [s, v] = q,

所以我们得到,q ∗ q = qq∗.这个特殊的乘法是遵守交换律的.
如果你还记得之前四元数逆的定义的话:
用这种办法寻找一个四元数的逆会非常高效,我们只需要将一个四元数的虚部改变 符号,除以它模长的平方就能获得这个四元数的逆了.如果 ∥q∥ = 1,也就是说 q 是 一个单位四元数 (Unit Quaternion),那么:
