深度强化学习系列(4): Q-Learning原理与实现
论文地址: http://www.gatsby.ucl.ac.uk/~dayan/papers/cjch.pdf
Q-Learning是发表于1989年的一种value-based,且model-free的特别经典的off-policy算法,近几年的DQN等算法均是在此基础上通过神经网络进行展开的。
1. 相关简介
强化学习学习过程中,通常是将学习的序列数据存储在表格中,通过获取表中的数据,利用greedy策略进行最大化Q值函数的学习方法。
2. 原理及推导
Q-Learning就是在某一个时刻的状态(state)下,采取动作a能够获得收益的期望,环境会根据agent的动作反馈相应的reward奖赏,核心就是将state和action构建成一张Q_table表来存储Q值,然后根据Q值来选取能够获得最大收益的动作,如表所示:
| Q-Table | a 1 a_{1} a1 | a 2 a_{2} a2 |
|---|---|---|
| s 1 s_{1} s1 | Q ( s 1 , a 1 ) Q(s_{1},a_{1}) Q(s1,a1) | Q ( s 1 , a 2 ) Q(s_{1},a_{2}) Q(s1,a2) |
| s 2 s_{2} s2 | Q ( s 2 , a 1 ) Q(s_{2},a_{1}) Q(s2,a1) | Q ( s 2 , a 2 ) Q(s_{2},a_{2}) Q(s2,a2) |
| s 3 s_{3} s3 | Q ( s 3 , a 1 ) Q(s_{3},a_{1}) Q(s3,a1) | Q ( s 3 , a 2 ) Q(s_{3},a_{2}) Q(s3,a2) |
Q-learning的主要优势就是使用了时间差分法TD(融合了蒙特卡洛和动态规划)能够进行离线(off-policy)学习, 使用bellman方程可以对马尔科夫过程求解最优策略。算法伪代码
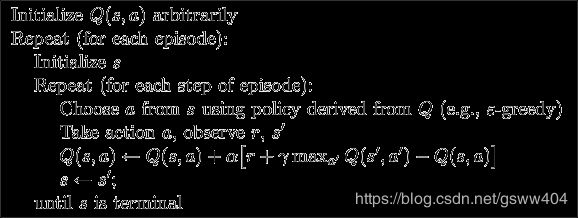
从伪代码中可以看出,在每个episode中的更新方式采用了贪婪greedy(进行探索)进行最优动作的选取,并通过更新 Q Q Q值(这里的 max a \max \limits_{a} amax 操作是非常关键的一部分)来达到学习目的。代码的复现过程中也是严格按照伪代码的顺序进行完成。
3. 代码复现
本文参考莫烦的代码,利用Q-learning算法实现一个走迷宫的实现,具体为红色块(机器人)通过上下左右移动,最后找到黄色圈(宝藏),黑色块为障碍物。

分析:对于机器人来说,选取的动作choose_action有四个状态,上下左右,也就是下文中的self.action(本质可以用一个list进行表示)
第一步:构建Q值表、动作值选取和Q值更新
import numpy as np
import pandas as pd
class QLearningTable:
def __init__(self, actions, learning_rate=0.01, reward_decay=0.9, e_greedy=0.9):
self.actions = actions # a list
self.lr = learning_rate
self.gamma = reward_decay
self.epsilon = e_greedy
self.q_table = pd.DataFrame(columns=self.actions, dtype=np.float64)
# 创建一个列为self.action的表结构
# 定义选取动作值
def choose_action(self, observation):
self.check_state_exist(observation)
# 动作选择,从均匀分布中采样(np.random.uniform)
if np.random.uniform() < self.epsilon:
# 选择最好的动作,此处通过loc函数直接对元素赋值
state_action = self.q_table.loc[observation, :]
# some actions may have the same value, randomly choose on in these actions
action = np.random.choice(state_action[state_action == np.max(state_action)].index)
else:
# choose random action
action = np.random.choice(self.actions)
return action
def learn(self, s, a, r, s_):
self.check_state_exist(s_)
q_predict = self.q_table.loc[s, a]
if s_ != 'terminal':
q_target = r + self.gamma * self.q_table.loc[s_, :].max() # next state is not terminal
else:
q_target = r # next state is terminal
self.q_table.loc[s, a] += self.lr * (q_target - q_predict) # update
def check_state_exist(self, state):
if state not in self.q_table.index:
# append new state to q table
self.q_table = self.q_table.append(
pd.Series(
[0]*len(self.actions),
index=self.q_table.columns,
name=state,
)
)
第二步: 写episode循环中的内容
def update():
for episode in range(100):
# initial observation
observation = env.reset()
# 每个Episode
while True:
# fresh env
env.render()
# RL choose action based on observation
action = RL.choose_action(str(observation))
# RL take action and get next observation and reward
observation_, reward, done = env.step(action)
# RL learn from this transition
RL.learn(str(observation), action, reward, str(observation_))
# swap observation
observation = observation_
# break while loop when end of this episode
if done:
break
# end of game
print('game over')
env.destroy()
第三步:写主函数入口
if __name__ == "__main__":
env = Maze()
RL = QLearningTable(actions=list(range(env.n_actions)))
env.after(100, update)
env.mainloop()
注:这里对环境maze函数的代码略去,大多数实验中,我们直接使用gym环境或者其他的现有的环境即可,此处环境见参考文献完整代码
参考文献:
- MorvanZhou.github. (2017,点击查看完整源代码)