目标检测和边界框
%matplotlib inline
from PIL import Image
import sys
sys.path.append('/home/input/')
import d2lzh1981 as d2l
d2l.set_figsize()
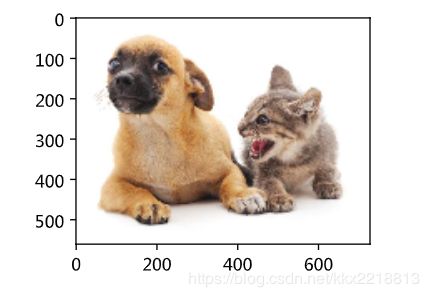
img = Image.open('/home/input/img2083/img/catdog.jpg')
d2l.plt.imshow(img);
边界框
dog_bbox, cat_bbox = [60, 45, 378, 516], [400, 112, 655, 493]
def bbox_to_rect(bbox, color):
return d2l.plt.Rectangle(
xy=(bbox[0], bbox[1]), width=bbox[2]-bbox[0], height=bbox[3]-bbox[1],
fill=False, edgecolor=color, linewidth=2)
fig = d2l.plt.imshow(img)
fig.axes.add_patch(bbox_to_rect(dog_bbox, 'blue'))
fig.axes.add_patch(bbox_to_rect(cat_bbox, 'red'));
锚框
import numpy as np
import math
import torch
import os
IMAGE_DIR = '/home/input/img2083/img/'
print(torch.__version__)
生成多个锚框
d2l.set_figsize()
img = Image.open(os.path.join(IMAGE_DIR, 'catdog.jpg'))
w, h = img.size
print("w = %d, h = %d" % (w, h))
def MultiBoxPrior(feature_map, sizes=[0.75, 0.5, 0.25], ratios=[1, 2, 0.5]):
"""
# 按照「9.4.1. 生成多个锚框」所讲的实现, anchor表示成(xmin, ymin, xmax, ymax).
https://zh.d2l.ai/chapter_computer-vision/anchor.html
Args:
feature_map: torch tensor, Shape: [N, C, H, W].
sizes: List of sizes (0~1) of generated MultiBoxPriores.
ratios: List of aspect ratios (non-negative) of generated MultiBoxPriores.
Returns:
anchors of shape (1, num_anchors, 4). 由于batch里每个都一样, 所以第一维为1
"""
pairs = []
for r in ratios:
pairs.append([sizes[0], math.sqrt(r)])
for s in sizes[1:]:
pairs.append([s, math.sqrt(ratios[0])])
pairs = np.array(pairs)
ss1 = pairs[:, 0] * pairs[:, 1]
ss2 = pairs[:, 0] / pairs[:, 1]
base_anchors = np.stack([-ss1, -ss2, ss1, ss2], axis=1) / 2
h, w = feature_map.shape[-2:]
shifts_x = np.arange(0, w) / w
shifts_y = np.arange(0, h) / h
shift_x, shift_y = np.meshgrid(shifts_x, shifts_y)
shift_x = shift_x.reshape(-1)
shift_y = shift_y.reshape(-1)
shifts = np.stack((shift_x, shift_y, shift_x, shift_y), axis=1)
anchors = shifts.reshape((-1, 1, 4)) + base_anchors.reshape((1, -1, 4))
return torch.tensor(anchors, dtype=torch.float32).view(1, -1, 4)
X = torch.Tensor(1, 3, h, w)
Y = MultiBoxPrior(X, sizes=[0.75, 0.5, 0.25], ratios=[1, 2, 0.5])
Y.shape
boxes = Y.reshape((h, w, 5, 4))
boxes[250, 250, 0, :]
def show_bboxes(axes, bboxes, labels=None, colors=None):
def _make_list(obj, default_values=None):
if obj is None:
obj = default_values
elif not isinstance(obj, (list, tuple)):
obj = [obj]
return obj
labels = _make_list(labels)
colors = _make_list(colors, ['b', 'g', 'r', 'm', 'c'])
for i, bbox in enumerate(bboxes):
color = colors[i % len(colors)]
rect = d2l.bbox_to_rect(bbox.detach().cpu().numpy(), color)
axes.add_patch(rect)
if labels and len(labels) > i:
text_color = 'k' if color == 'w' else 'w'
axes.text(rect.xy[0], rect.xy[1], labels[i],
va='center', ha='center', fontsize=6, color=text_color,
bbox=dict(facecolor=color, lw=0))
d2l.set_figsize()
fig = d2l.plt.imshow(img)
bbox_scale = torch.tensor([[w, h, w, h]], dtype=torch.float32)
show_bboxes(fig.axes, boxes[250, 250, :, :] * bbox_scale,
['s=0.75, r=1', 's=0.75, r=2', 's=0.75, r=0.5', 's=0.5, r=1', 's=0.25, r=1'])
交并比
def compute_intersection(set_1, set_2):
"""
计算anchor之间的交集
Args:
set_1: a tensor of dimensions (n1, 4), anchor表示成(xmin, ymin, xmax, ymax)
set_2: a tensor of dimensions (n2, 4), anchor表示成(xmin, ymin, xmax, ymax)
Returns:
intersection of each of the boxes in set 1 with respect to each of the boxes in set 2, shape: (n1, n2)
"""
lower_bounds = torch.max(set_1[:, :2].unsqueeze(1), set_2[:, :2].unsqueeze(0))
upper_bounds = torch.min(set_1[:, 2:].unsqueeze(1), set_2[:, 2:].unsqueeze(0))
intersection_dims = torch.clamp(upper_bounds - lower_bounds, min=0)
return intersection_dims[:, :, 0] * intersection_dims[:, :, 1]
def compute_jaccard(set_1, set_2):
"""
计算anchor之间的Jaccard系数(IoU)
Args:
set_1: a tensor of dimensions (n1, 4), anchor表示成(xmin, ymin, xmax, ymax)
set_2: a tensor of dimensions (n2, 4), anchor表示成(xmin, ymin, xmax, ymax)
Returns:
Jaccard Overlap of each of the boxes in set 1 with respect to each of the boxes in set 2, shape: (n1, n2)
"""
intersection = compute_intersection(set_1, set_2)
areas_set_1 = (set_1[:, 2] - set_1[:, 0]) * (set_1[:, 3] - set_1[:, 1])
areas_set_2 = (set_2[:, 2] - set_2[:, 0]) * (set_2[:, 3] - set_2[:, 1])
union = areas_set_1.unsqueeze(1) + areas_set_2.unsqueeze(0) - intersection
return intersection / union
标注训练集的锚框
bbox_scale = torch.tensor((w, h, w, h), dtype=torch.float32)
ground_truth = torch.tensor([[0, 0.1, 0.08, 0.52, 0.92],
[1, 0.55, 0.2, 0.9, 0.88]])
anchors = torch.tensor([[0, 0.1, 0.2, 0.3], [0.15, 0.2, 0.4, 0.4],
[0.63, 0.05, 0.88, 0.98], [0.66, 0.45, 0.8, 0.8],
[0.57, 0.3, 0.92, 0.9]])
fig = d2l.plt.imshow(img)
show_bboxes(fig.axes, ground_truth[:, 1:] * bbox_scale, ['dog', 'cat'], 'k')
show_bboxes(fig.axes, anchors * bbox_scale, ['0', '1', '2', '3', '4']);
compute_jaccard(anchors, ground_truth[:, 1:])
def assign_anchor(bb, anchor, jaccard_threshold=0.5):
"""
# 按照「9.4.1. 生成多个锚框」图9.3所讲为每个anchor分配真实的bb, anchor表示成归一化(xmin, ymin, xmax, ymax).
https://zh.d2l.ai/chapter_computer-vision/anchor.html
Args:
bb: 真实边界框(bounding box), shape:(nb, 4)
anchor: 待分配的anchor, shape:(na, 4)
jaccard_threshold: 预先设定的阈值
Returns:
assigned_idx: shape: (na, ), 每个anchor分配的真实bb对应的索引, 若未分配任何bb则为-1
"""
na = anchor.shape[0]
nb = bb.shape[0]
jaccard = compute_jaccard(anchor, bb).detach().cpu().numpy()
assigned_idx = np.ones(na) * -1
jaccard_cp = jaccard.copy()
for j in range(nb):
i = np.argmax(jaccard_cp[:, j])
assigned_idx[i] = j
jaccard_cp[i, :] = float("-inf")
for i in range(na):
if assigned_idx[i] == -1:
j = np.argmax(jaccard[i, :])
if jaccard[i, j] >= jaccard_threshold:
assigned_idx[i] = j
return torch.tensor(assigned_idx, dtype=torch.long)
def xy_to_cxcy(xy):
"""
将(x_min, y_min, x_max, y_max)形式的anchor转换成(center_x, center_y, w, h)形式的.
https://github.com/sgrvinod/a-PyTorch-Tutorial-to-Object-Detection/blob/master/utils.py
Args:
xy: bounding boxes in boundary coordinates, a tensor of size (n_boxes, 4)
Returns:
bounding boxes in center-size coordinates, a tensor of size (n_boxes, 4)
"""
return torch.cat([(xy[:, 2:] + xy[:, :2]) / 2,
xy[:, 2:] - xy[:, :2]], 1)
def MultiBoxTarget(anchor, label):
"""
# 按照「9.4.1. 生成多个锚框」所讲的实现, anchor表示成归一化(xmin, ymin, xmax, ymax).
https://zh.d2l.ai/chapter_computer-vision/anchor.html
Args:
anchor: torch tensor, 输入的锚框, 一般是通过MultiBoxPrior生成, shape:(1,锚框总数,4)
label: 真实标签, shape为(bn, 每张图片最多的真实锚框数, 5)
第二维中,如果给定图片没有这么多锚框, 可以先用-1填充空白, 最后一维中的元素为[类别标签, 四个坐标值]
Returns:
列表, [bbox_offset, bbox_mask, cls_labels]
bbox_offset: 每个锚框的标注偏移量,形状为(bn,锚框总数*4)
bbox_mask: 形状同bbox_offset, 每个锚框的掩码, 一一对应上面的偏移量, 负类锚框(背景)对应的掩码均为0, 正类锚框的掩码均为1
cls_labels: 每个锚框的标注类别, 其中0表示为背景, 形状为(bn,锚框总数)
"""
assert len(anchor.shape) == 3 and len(label.shape) == 3
bn = label.shape[0]
def MultiBoxTarget_one(anc, lab, eps=1e-6):
"""
MultiBoxTarget函数的辅助函数, 处理batch中的一个
Args:
anc: shape of (锚框总数, 4)
lab: shape of (真实锚框数, 5), 5代表[类别标签, 四个坐标值]
eps: 一个极小值, 防止log0
Returns:
offset: (锚框总数*4, )
bbox_mask: (锚框总数*4, ), 0代表背景, 1代表非背景
cls_labels: (锚框总数, 4), 0代表背景
"""
an = anc.shape[0]
assigned_idx = assign_anchor(lab[:, 1:], anc)
print("a: ", assigned_idx.shape)
print(assigned_idx)
bbox_mask = ((assigned_idx >= 0).float().unsqueeze(-1)).repeat(1, 4)
print("b: " , bbox_mask.shape)
print(bbox_mask)
cls_labels = torch.zeros(an, dtype=torch.long)
assigned_bb = torch.zeros((an, 4), dtype=torch.float32)
for i in range(an):
bb_idx = assigned_idx[i]
if bb_idx >= 0:
cls_labels[i] = lab[bb_idx, 0].long().item() + 1
assigned_bb[i, :] = lab[bb_idx, 1:]
center_anc = xy_to_cxcy(anc)
center_assigned_bb = xy_to_cxcy(assigned_bb)
offset_xy = 10.0 * (center_assigned_bb[:, :2] - center_anc[:, :2]) / center_anc[:, 2:]
offset_wh = 5.0 * torch.log(eps + center_assigned_bb[:, 2:] / center_anc[:, 2:])
offset = torch.cat([offset_xy, offset_wh], dim = 1) * bbox_mask
return offset.view(-1), bbox_mask.view(-1), cls_labels
batch_offset = []
batch_mask = []
batch_cls_labels = []
for b in range(bn):
offset, bbox_mask, cls_labels = MultiBoxTarget_one(anchor[0, :, :], label[b, :, :])
batch_offset.append(offset)
batch_mask.append(bbox_mask)
batch_cls_labels.append(cls_labels)
bbox_offset = torch.stack(batch_offset)
bbox_mask = torch.stack(batch_mask)
cls_labels = torch.stack(batch_cls_labels)
return [bbox_offset, bbox_mask, cls_labels]
labels = MultiBoxTarget(anchors.unsqueeze(dim=0),
ground_truth.unsqueeze(dim=0))
输出预测边界框
anchors = torch.tensor([[0.1, 0.08, 0.52, 0.92], [0.08, 0.2, 0.56, 0.95],
[0.15, 0.3, 0.62, 0.91], [0.55, 0.2, 0.9, 0.88]])
offset_preds = torch.tensor([0.0] * (4 * len(anchors)))
cls_probs = torch.tensor([[0., 0., 0., 0.,],
[0.9, 0.8, 0.7, 0.1],
[0.1, 0.2, 0.3, 0.9]])
fig = d2l.plt.imshow(img)
show_bboxes(fig.axes, anchors * bbox_scale,
['dog=0.9', 'dog=0.8', 'dog=0.7', 'cat=0.9'])
from collections import namedtuple
Pred_BB_Info = namedtuple("Pred_BB_Info", ["index", "class_id", "confidence", "xyxy"])
def non_max_suppression(bb_info_list, nms_threshold = 0.5):
"""
非极大抑制处理预测的边界框
Args:
bb_info_list: Pred_BB_Info的列表, 包含预测类别、置信度等信息
nms_threshold: 阈值
Returns:
output: Pred_BB_Info的列表, 只保留过滤后的边界框信息
"""
output = []
sorted_bb_info_list = sorted(bb_info_list, key = lambda x: x.confidence, reverse=True)
while len(sorted_bb_info_list) != 0:
best = sorted_bb_info_list.pop(0)
output.append(best)
if len(sorted_bb_info_list) == 0:
break
bb_xyxy = []
for bb in sorted_bb_info_list:
bb_xyxy.append(bb.xyxy)
iou = compute_jaccard(torch.tensor([best.xyxy]),
torch.tensor(bb_xyxy))[0]
n = len(sorted_bb_info_list)
sorted_bb_info_list = [sorted_bb_info_list[i] for i in range(n) if iou[i] <= nms_threshold]
return output
def MultiBoxDetection(cls_prob, loc_pred, anchor, nms_threshold = 0.5):
"""
# 按照「9.4.1. 生成多个锚框」所讲的实现, anchor表示成归一化(xmin, ymin, xmax, ymax).
https://zh.d2l.ai/chapter_computer-vision/anchor.html
Args:
cls_prob: 经过softmax后得到的各个锚框的预测概率, shape:(bn, 预测总类别数+1, 锚框个数)
loc_pred: 预测的各个锚框的偏移量, shape:(bn, 锚框个数*4)
anchor: MultiBoxPrior输出的默认锚框, shape: (1, 锚框个数, 4)
nms_threshold: 非极大抑制中的阈值
Returns:
所有锚框的信息, shape: (bn, 锚框个数, 6)
每个锚框信息由[class_id, confidence, xmin, ymin, xmax, ymax]表示
class_id=-1 表示背景或在非极大值抑制中被移除了
"""
assert len(cls_prob.shape) == 3 and len(loc_pred.shape) == 2 and len(anchor.shape) == 3
bn = cls_prob.shape[0]
def MultiBoxDetection_one(c_p, l_p, anc, nms_threshold = 0.5):
"""
MultiBoxDetection的辅助函数, 处理batch中的一个
Args:
c_p: (预测总类别数+1, 锚框个数)
l_p: (锚框个数*4, )
anc: (锚框个数, 4)
nms_threshold: 非极大抑制中的阈值
Return:
output: (锚框个数, 6)
"""
pred_bb_num = c_p.shape[1]
anc = (anc + l_p.view(pred_bb_num, 4)).detach().cpu().numpy()
confidence, class_id = torch.max(c_p, 0)
confidence = confidence.detach().cpu().numpy()
class_id = class_id.detach().cpu().numpy()
pred_bb_info = [Pred_BB_Info(
index = i,
class_id = class_id[i] - 1,
confidence = confidence[i],
xyxy=[*anc[i]])
for i in range(pred_bb_num)]
obj_bb_idx = [bb.index for bb in non_max_suppression(pred_bb_info, nms_threshold)]
output = []
for bb in pred_bb_info:
output.append([
(bb.class_id if bb.index in obj_bb_idx else -1.0),
bb.confidence,
*bb.xyxy
])
return torch.tensor(output)
batch_output = []
for b in range(bn):
batch_output.append(MultiBoxDetection_one(cls_prob[b], loc_pred[b], anchor[0], nms_threshold))
return torch.stack(batch_output)
output = MultiBoxDetection(
cls_probs.unsqueeze(dim=0), offset_preds.unsqueeze(dim=0),
anchors.unsqueeze(dim=0), nms_threshold=0.5)
output
fig = d2l.plt.imshow(img)
for i in output[0].detach().cpu().numpy():
if i[0] == -1:
continue
label = ('dog=', 'cat=')[int(i[0])] + str(i[1])
show_bboxes(fig.axes, [torch.tensor(i[2:]) * bbox_scale], label)