DETR基于标准的Transorfmer结构,性能能够媲美Faster RCNN,而论文整体思想十分简洁,希望能像Faster RCNN为后续的很多研究提供了大致的思路
来源:晓飞的算法工程笔记 公众号
论文: End-to-End Object Detection with Transformers
Introduction
之前也看过一些工作研究将self-attention应用到视觉任务中,比如Stand-Alone Self-Attention in Vision Models和On the Relationship between Self-Attention and Convolutional Layers,但这些方法大都只是得到与卷积类似的效果,还没有很出彩的表现,而DETR基于transformer颠覆了主流目标检测的做法,主要有三个亮点:
- Standard Transformer,DETR采用标准的Transformer和前向网络FFN进行特征的处理以及结果的输出,配合精心设计的postion encoding以及object queries,不需要anchor,直接预测bbox坐标以及类别。
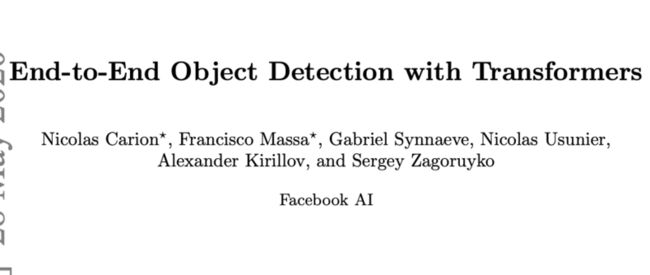
- Set prediction,DETR在训练过程中使用匈牙利排序算法将GT和模型预测结果一一对应,使得在推理时的模型预测结果即为最终结果,不需要后续的NMS操作。
- 目标检测性能超越了经典的Faster RCNN,打开了目标检测研究的新路线,并且DETR也能改装应用于全景分割任务,性能也不错。
The DETR model
DETR architecture
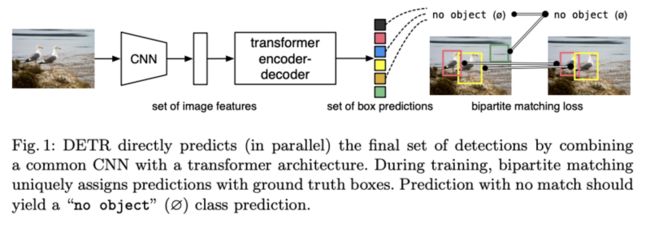
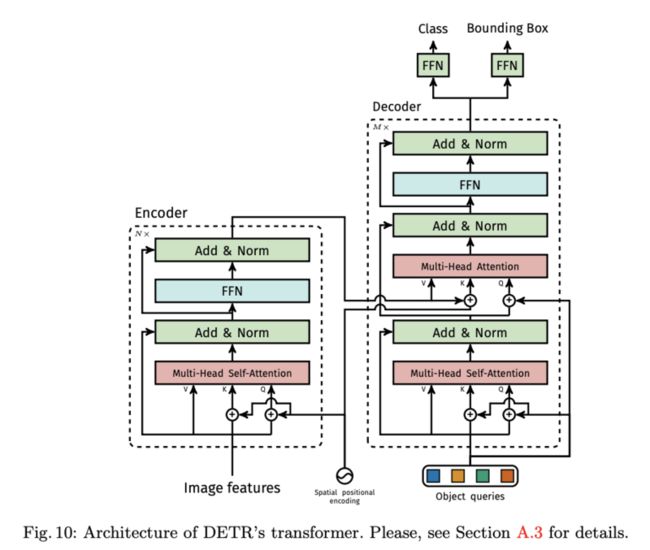
DETR的整体架构很简单,如图2所示,包含3个主要部分:CNN主干、encoder-decoder transformer和简单的前向网络(FFN)。
Backbone
定义初始图片$x_{img} \in \mathbb{R}^{3\times H_o\times W_o}$,使用常规的CNN主干生成低分辨率特征图$f\in \mathbb{R}^{C\times H\times W}$,论文采用$C=2048$以及$H,W=\frac{H_o}{32}, \frac{W_o}{32}$。
Transformer encoder
先用$1\times 1$卷积将输入降至较小的维度$d$,得到新特征图$z_o \in \mathbb{R}^{d\times H\times W}$,再将特征图$z_o$空间维度折叠成1维,转换为$d\times HW$的序列化输入。DETR包含多个encoder,每个encoder都为标准结构,包含mullti-head self-attention模块和前向网络FFN。由于transformer是排序不变的,为每个attention层补充一个固定的位置encoding输入。
Transformer decoder
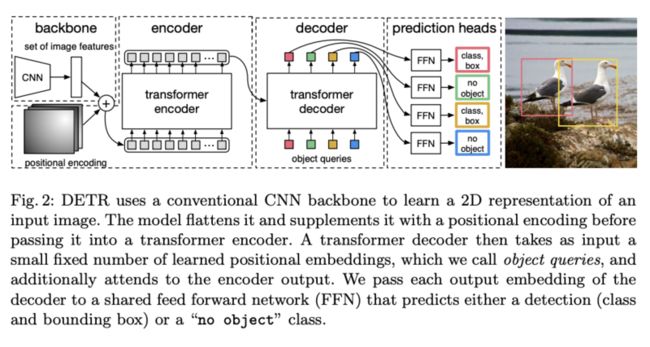
decoder也是transformer的标准结构,使用multi-head self-attention模块和encoder-decoder注意力机制输出$N$个大小为$d$的embedding,唯一不同的是DETR并行地decode $N$个目标,不需要自回归的机制。由于decoder也是排序不变的,采用学习到的位置encdoing(等同于anchor)作为输入,称为object queries。类似于encoder,将位置encoding输入到每个attention层,另外还有空间位置encoding,见图10。decoder将$N$个object queries转换为$N$个输出embedding,然后独立地解码成box坐标和class标签,得到$N$个最终的预测结构。由于了使用self-attention以及encoder-decoder注意力机制,模型能够全局地考虑所有的目标。
Prediction feed-forward networks (FFNs)
使用带ReLU激活的3层感知机以及线性映射层来解码得到最终的预测结果,感知机的隐藏层维度为$d$。FFN预测$N个$归一化的中心坐标、高度、宽度以及softmax后的类别得分,由于$N$一般大于目标个数,所以使用特殊的类别$\emptyset$来标记无预测目标,类似于背景类。需要注意,最后用于输出的FFN与encoder和decoder里的FFN是不一样的。
Auxiliary decoding losses
论文发现对decoder使用辅助损失进行训练十分有效,特别是帮助模型输出正确的目标个数,所以在每个decoder层添加FFN和Hugarian loss,所有的FFN共享参数,另外也使用了共享的layer-norm来归一化FFN的输入。
Object detection set prediction loss
DETR输出固定的$N$个预测结果,最大的困难在于根据GT对预测结果进行评分,需要先找到预测结果和GT的对应关系。定义$y$为GT集合,大小为N,缺少的用$\emptyset$填充,$\hat{y}=\{ \hat{y}_i\}^N_{i=1}$为预测结果,为了最好地匹配GT和预测结果,使用匈牙利算法(二部图匹配方法)找到能够最小化匹配损失的最优排列方法$\sigma$:

$\mathcal{L}_{match} (y_i, \hat{y}_{\sigma(i)})=-\Bbb{1}_{\{c_i \ne \emptyset\}}\hat{p}_{\sigma(i)}(c_i)+1_{\{c_i \ne \emptyset \} } \mathcal{L_{box}}(b_i, \hat{b}_{\sigma(i)})$为排序后GT-预测结果对的匹配损失,匹配损失考虑类别预测以及bbox的相似度。$y_i=(c_i, b_i)$为GT,其中$c_i$为类别,$b_i\in [0, 1]^4$为相对于图片大小的坐标向量(x, y, hetight, weight),$\hat{p}_{\sigma(i)}(c_i)$和$\hat{b}_{\sigma(i)}$分别为预测的类别置信度和bbox。这里的匹配过程类似于目前检测算法中anchor和GT的匹配逻辑,而区别在于这里的预测结果和GT是一一对应的。
在找到最优排列方法$\hat{\sigma}$后,计算Hungarian loss:

在实现时,考虑分类不均衡,对$c_i=\emptyset$的分类项降权10倍。
与普通的目标检测方法预测bbox的差值不同,DETR直接预测bbox的坐标。虽然这个方法实现很简单,但计算损失时会受目标尺寸的影响,论文采用线性$\mathcal{l}_1$损失和IoU损失来保证尺度不变,bbox损失$\mathcal{L}_{box}(b_i, \hat{b}_{\sigma (i)})$为$\lambda_{iou}\mathcal{L}_{iou}(b_i, \hat{b}_{\sigma(i)})+\lambda_{L1} || b_i - \hat{b}_{\sigma(i)} ||_1$,bbox损失需要用正样本数进行归一化。
Experiments
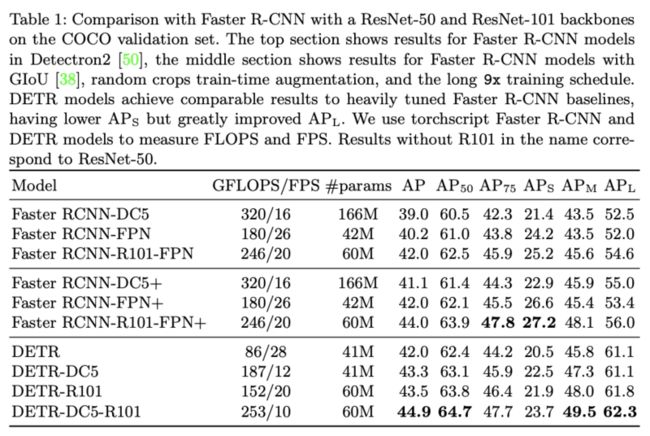
DETR性能超越了经典的Faster RCNN。
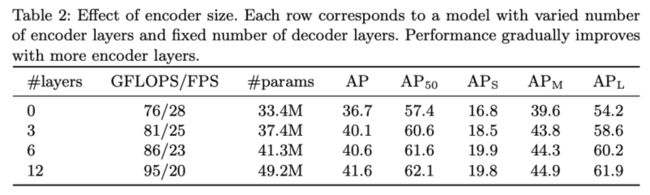
探究encoder层数对性能的影响
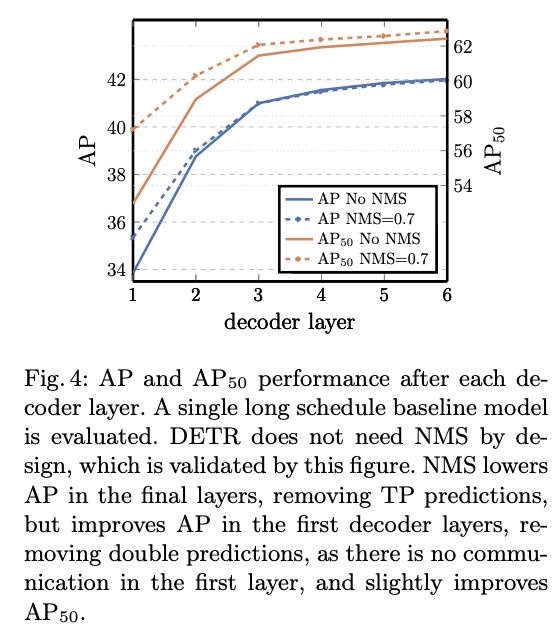
每层decoder输出进行预测的准确率,可以看到逐层递增。
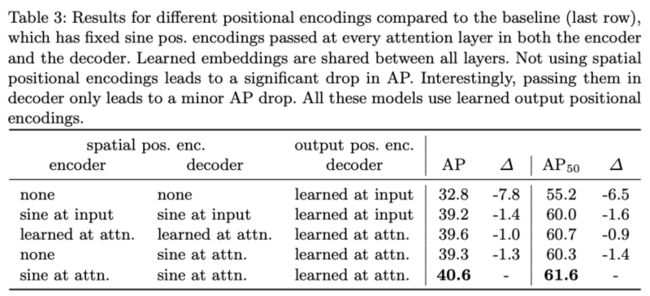
位置embedding方式对性能的影响,这里的spatial pos对应图10的spatial positional encoding,而output pos则对应图10的Object queries。
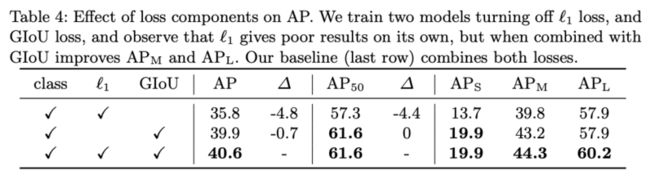
损失函数对性能的影响。
DETR for panoptic segmentation

DETR也可以在decoder的输出接一个mask head来进行全景分割任务,主要利用了DETR模型的特征提取能力。
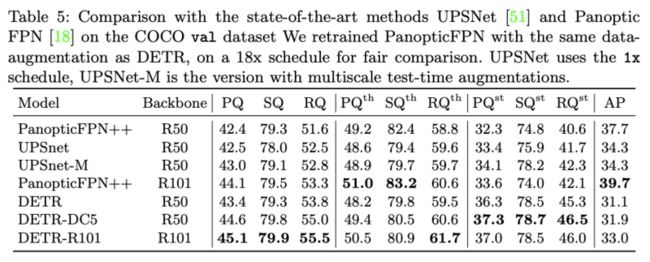
与当前主流模型的全景分割性能对比。
Conclustion
DETR基于标准的Transorfmer结构,性能能够媲美Faster RCNN,而论文整体思想十分简洁,希望能像Faster RCNN为后续的很多研究提供了大致的思路。
如果本文对你有帮助,麻烦点个赞或在看呗~
更多内容请关注 微信公众号【晓飞的算法工程笔记】
