目前笔者正在接受明德扬FPGA网上培训班的培训,讲的内容非常适合新手,且以练习和互动答疑的教学模式让我学到了很多东西。由于是根据自身时间安排进度的,所以战线拉的比较长,发现做些设计总结非常重要,可以帮助自己理清思路,同时也能得到很好的复习。
之前一直在做altera FPGA的相关学习,对xilinx还不是很熟悉,借着这个契机,将比较基础常用的设计在VIVADO开发环境中过一遍,对我来说是个不错的选择。进入今天的正题,本篇博文旨在通过一个小例子掌握状态机的设计方法。由于设计非常简单,采用常见的三段式状态机来规范设计。后续复杂的例子中,将采用明德扬提出的四段式状态机,个人理解虽然与三段式基本思想相同,但有助于简化设计,理清思路。
众所周知,硬件按键都存在机械抖动。所以一次人为按下的动作会触发数次按键按下的行为。所谓“按键消抖”模块的功能就是将抖动滤除掉,保证对按键状态的有效识别。单片机的设计思想比较通用,即检测到按键连接端口为低电平(低电平有效)后,延迟一段时间再次确认是否为低。若是则说明此次低电平确实为一次按键行为,否则视为抖动。按键松手检测同理。其大体设计流程如下: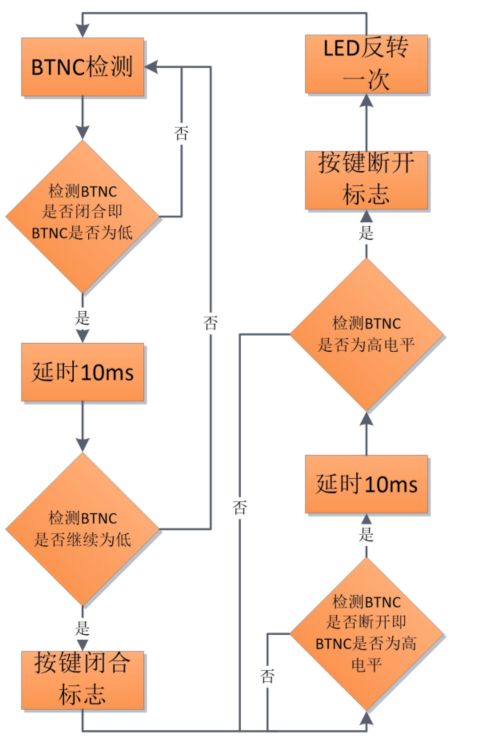
这是典型的顺序设计思想,但FPGA是并行的。所以这种时间有先后,且操作差异较大的处理过程要用到状态机进行设计。简化后可将上述过程分为四个状态:初始空闲状态、延迟并检测低电平状态、检测释放状态和延迟并检测高电平状态。以下是状态转移图:
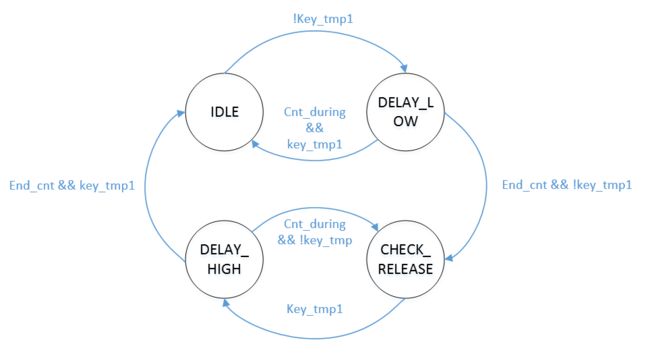
空闲状态下如检测到按键接口低电平进入延迟并确认低电平状态,延迟计数时间设定为10ms。若计数完成且依然为低电平则按下有效进入检测释放状态,若计数期间按键出现高电平说明为抖动回到初始状态。在检测释放状态中若出现高电平进入延迟确认状态,否则持续检测高电平。在延迟确认高电平状态若计数完成且为高电平视为有效松手行为,此时置位有效标志位,按键完成了一次按下到松手的完整有效过程回到IDLE状态再检测下一次按下。如果计数期间出现低电平同样为抖动回到检测释放状态重新检测。
1 `timescale 1ns / 1ps 2 3 module key_jitter# 4 ( 5 parameter DELAY_TIME = 2000_000 //延迟10ms 6 ) 7 ( 8 input clk, 9 input rst_n, 10 11 input key_i, 12 output reg led_o 13 ); 14 15 localparam IDLE = 4'b0001, 16 DELAY_LOW = 4'b0010, 17 CHECK_RELEASE = 4'b0100, 18 DELAY_HIGH = 4'b1000; 19 20 reg [20:0] div_cnt; 21 reg [3:0] state_c,state_n; 22 reg key_tmp0,key_tmp1; 23 24 wire add_cnt,end_cnt; 25 wire vld_flag; 26 wire cnt_during; 27 28 //消除亚稳态 29 always@(posedge clk or negedge rst_n)begin 30 if(!rst_n)begin 31 key_tmp0 <= 0; 32 key_tmp1 <= 0; 33 end 34 else begin 35 key_tmp0 <= key_i; 36 key_tmp1 <= key_tmp0; 37 end 38 end 39 40 //状态机 41 always@(posedge clk or negedge rst_n)begin 42 if(!rst_n) 43 state_c <= IDLE; 44 else 45 state_c <= state_n; 46 end 47 48 always@(*)begin 49 case(state_c) 50 IDLE:begin //初始状态检测是否有按键按下 //4'b0001 51 if(key_tmp1 == 0)//有按键按下进入延时后再次确认低电平状态 52 state_n <= DELAY_LOW; 53 else 54 state_n <= state_c; 55 end 56 57 DELAY_LOW:begin //延时并再次确认低电平状态 //4'b0010 58 if(end_cnt && key_tmp1 == 0)//10ms后依然是低电平则有按键按下,此时检测是否松手 59 state_n <= CHECK_RELEASE; 60 else if(cnt_during && key_tmp1 == 1) 61 state_n <= IDLE;//若未计数完成出现高电平则视为抖动,重新检测按下 62 else 63 state_n <= state_c;//计数未完成继续 64 end 65 66 CHECK_RELEASE:begin //4'b0100 67 if(key_tmp1 == 1)//为高电平则等待并再次确认 68 state_n <= DELAY_HIGH; 69 else 70 state_n <= state_c;//若没有高电平则持续检测 71 end 72 73 DELAY_HIGH:begin //4'b1000 74 if(vld_flag)//10ms后依然高电平则按键释放 75 state_n <= IDLE;//释放后回到初始状态再次检测下一次的按下 76 else if(cnt_during && key_tmp1 == 0)//若延时后为0则松手过程视为抖动 77 state_n <= CHECK_RELEASE; 78 else 79 state_n <= state_c;//继续计数 80 end 81 82 default: 83 state_n <= IDLE; 84 endcase 85 end 86 87 assign cnt_during = add_cnt && div_cnt < DELAY_TIME; 88 89 //延迟计数器 90 always@(posedge clk or negedge rst_n)begin 91 if(!rst_n) 92 div_cnt <= 0; 93 else if(add_cnt)begin 94 if(end_cnt) 95 div_cnt <= 0; 96 else 97 div_cnt <= div_cnt + 1'b1; 98 end 99 else 100 div_cnt <= 0; 101 end 102 103 assign add_cnt = state_c == DELAY_HIGH || state_c == DELAY_LOW; 104 assign end_cnt = add_cnt && div_cnt == DELAY_TIME - 1; 105 //按下一次并释放后表示一次有效的操作,此时led翻转 106 always@(posedge clk or negedge rst_n)begin 107 if(!rst_n) 108 led_o <= 0;//上电复位点亮 109 else if(state_c == DELAY_HIGH && vld_flag)//可将()内条件作为按键有效输出 110 led_o <= ~led_o; 111 end 112 113 114 assign vld_flag = end_cnt && key_tmp1 == 1; 115 116 endmodule
需要注意的知识点是状态机的设计技巧和参数设定。采用三段式状态机设计:一个always块用同步时序方式描述状态转移,另一个模块采用组合逻辑判断状态转移条件,最后给每一个状态输出分配一个时序逻辑块。其优势在于它将同步时序和组合逻辑分别放到不同的always 程序块中实现。这样做的好处不仅仅是便于阅读、理解、维护,更重要的是利于综合器优化代码,利于用户添加合适的时序约束条件,利于布局布线器实现设计。同时采用时序逻辑输出消除了“毛刺”现象,提高设计稳定性。
另外,参数化设计帮助提高代码可读性和灵活性。verilog中经常使用parameter 和localparam两个关键字定义参数,两者之间有一定的区别:parameter可用作在顶层模块中例化底层模块时传递参数的接口,localparam的作用域仅仅限于当前module,不能作为参数传递的接口。所以这里将延迟时间设定为可传递参数接口,便于顶层模块修改。而状态参数不能改动,只使其作用于当前模块。
在FPGA设计中,仿真环节必不可少,甚至占用设计周期的大半,极大提高开发效率,让问题尽量在设计前期解决。现在编写测试激励,用modelsim仿真观察按键消抖模块是否完成预期功能。
1 `timescale 1ns / 1ps 2 3 module key_jitter_tb(); 4 5 // reg sys_clk_n,sys_clk_p; 6 reg clk; 7 reg rst_n; 8 reg key_i; 9 reg [15:0] myrand; 10 11 wire led_o; 12 13 key_jitter key_jitter 14 ( 15 16 .clk(clk), 17 .rst_n(rst_n), 18 19 .key_i(key_i), 20 .led_o(led_o) 21 ); 22 23 defparam key_jitter.DELAY_TIME = 50000;//参数重定义 有效时间改为50us便于仿真 24 parameter RST_TIME = 2, 25 CYCLE = 5; 26 27 initial begin 28 clk = 0; 29 forever #(CYCLE /2) clk = ~clk; 30 end 31 32 initial begin 33 rst_n = 1; 34 #1; 35 rst_n = 0; 36 #(CYCLE * RST_TIME); 37 rst_n = 1; 38 end 39 40 initial begin 41 #1; 42 key_i = 1;//初始未按下 43 #(CYCLE * RST_TIME); 44 #(CYCLE * 10); 45 press_key; 46 #10_000; 47 press_key; 48 $stop; 49 end 50 51 task press_key; 52 begin 53 repeat(20)begin//模拟抖动过程 54 myrand = {$random}%50000; 55 #myrand key_i = ~key_i; 56 end 57 key_i = 0; 58 #300_000; 59 repeat(20)begin 60 myrand = {$random}%50000; 61 #myrand key_i = ~key_i; 62 end 63 key_i = 1; 64 #300_000; 65 end 66 endtask 67 68 endmodule
其中使用defparam实现参数重定义,让延迟时间缩短,可以在完成功能验证的前提下缩短仿真时间,提升开发效率。(仿真真的是慢!)在测试激励的编写中,task任务封装绝对是一项利器,可以非常方便地将某项功能封装后反复调用。测试文件中将按键按下释放以及中间的抖动过程作为一个task,在仿真过程中多次调用模拟多次按下释放的行为。通过观察输出波形即可得知功能是否正确。
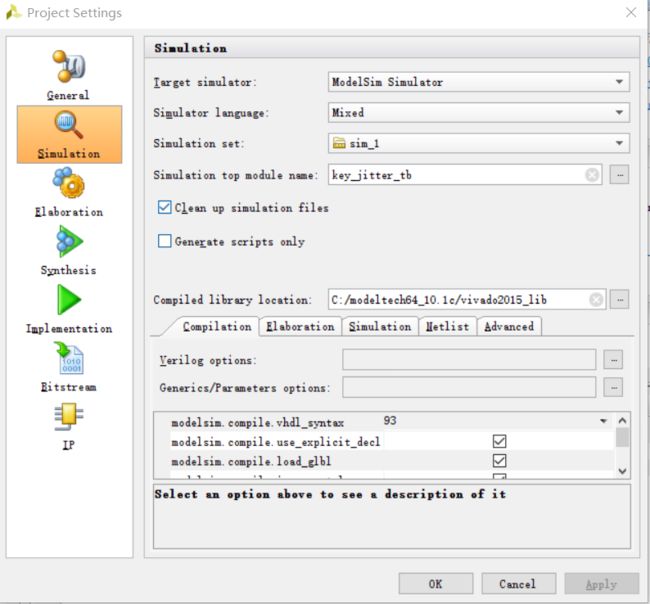
在仿真之前,一定要设置好仿真工具、编译库等选项。注意:如果按下Run xx simulation之后一直卡在执行仿真过程中,说明代码中有错误。此时要检查tcl console和log日志文件查看仿真相关警告和错误提示并作出修改。
modelsim仿真波形:

可以看到两处红圈处为一次按下释放的有效动作,使led输出翻转。以上便是FPGA实现按键消抖模块的全部设计过程。由于设计比较简单,此处略去上板验证并在线调试的过程,在之后的设计中将给出此处的具体操作流程。这是笔者第一次撰写技术博文,希望大家给出宝贵建议,相互交流学习!