面试编程
面试知识点总结
https://blog.csdn.net/oBrightLamp/article/details/85067981
ps:部分图截自其他博客,忘记是哪几篇了,如果有问题,请联系我哈
1. 实现NMS
目标: 加快检测速度,使用NMS去除冗余框,找到具有代表性的bbox,进行后续操作

算法步骤:
根据候选框的类别分类概率做排序:A
step2:从最大概率矩形框F开始,分别判断A~E与F的重叠度IOU(两框的交并比)是否大于某个设定的阈值,假设B、D与F的重叠度超过阈值,那么就扔掉B、D;
step3:从剩下的矩形框A、C、E中,选择概率最大的E,标记为要保留下来的,然后判读E与A、C的重叠度,扔掉重叠度超过设定阈值的矩形框
算法实现:
import numpy as np
def nms_op(dets, thresh):
#获取x1/y1/x2/y2/score
x1 = dets[:,0] #框的个数,P
y1 = dets[:,1]
x2 = dets[:, 2]
y2 = dets[:, 3]
scores = dets[:, 4]
#标记置信度最高的框进行保留
order = scores.argsort()[::-1] #从大到小 返回下标
#计算所有框的面积
areas = (x2-x1+1)*(y2-y1+1)
#最终保留的框
keep = []
#执行step2,计算交并比
while order.size > 0:
i = order[0]
keep.append(i)
#计算当前概率最大矩形框与其他矩形框的相交框的坐标,会用到numpy的broadcast机制,得到的是向量
xx1 = np.maximum(x1[i], x1[order[1:]])
yy1 = np.maximum(y1[i], y1[order[1:]])
xx2 = np.minimum(x2[i], x2[order[1:]])
yy2 = np.minimum(y2[i], y2[order[1:]])
#计算相交框的面积,注意矩形框不相交时w或h算出来会是负数,用0代替
w = np.maximum(0.0, xx2 - xx1 + 1)
h = np.maximum(0.0, yy2 - yy1 + 1)
inter = w * h
#计算重叠度IOU:重叠面积/(面积1+面积2-重叠面积)
ovr = inter / (areas[i] + areas[order[1:]] - inter)
#找到重叠度不高于阈值的矩形框索引
inds = np.where(ovr <= thresh)[0] #返回满足阈值要求的索引,[0]相当于step3中的E
#将order序列更新,由于前面得到的矩形框索引要比矩形框在原order序列中的索引小1,所以要把这个1加回来
order = order[inds + 1]
return keep
# test
if __name__ == "__main__":
dets = np.array([[30, 20, 230, 200, 1],
[50, 50, 260, 220, 0.9],
[210, 30, 420, 5, 0.8],
[430, 280, 460, 360, 0.7]])
thresh = 0.35
keep_dets = py_nms(dets, thresh)
print(keep_dets)
print(dets[keep_dets])
2.实现Resize函数
3.均值滤波 | 中值滤波
请对图像的中值滤波进行实现(输入为HW, kernalsize=mm)默认为:灰度图像
ps:不进行padding
均值滤波(blue)

#==========================中值滤波===================================================
from PIL import Image
import numpy as np
def MedianFilter(src, dst, k = 3, padding = None):
imarray = np.array(Image.open(src))
height, width = imarray.shape
if not padding:
edge = int((k-1)/2)
#若图像大小<卷积核大小,直接返回None
if height - 1 - edge <= edge or width - 1 - edge <= edge:
print("The parameter k is to large.")
return None
#图像大小>卷积核大小,滤波
new_arr = np.zeros((height, width), dtype = "uint8")
for i in range(height):
for j in range(width):
#四周的边框点保持不动,如上图无颜色的点
if i <= edge - 1 or i >= height - 1 - edge or j <= edge - 1 or j >= height - edge - 1:
new_arr[i, j] = imarray[i, j]
#其他进行中值操作,如上图有颜色的点
else:
new_arr[i, j] = np.median(imarray[i - edge:i + edge + 1, j - edge:j + edge + 1])
#将array转换为Image格式,保存为图片
new_im = Image.fromarray(new_arr)
new_im.save(dst)
if __name__ == '__main__':
src = 'input.jpg'
dst = 'out.jpg'
MedianFilter(src, dst)
#==========================均值滤波===================================================
ps: np.median ---> np.mean
4.实现maxpool的前向和反向
- 请写出MaxPooling层的前向计算和反向计算过程
参考答案:https://blog.csdn.net/oBrightLamp/article/details/84635308
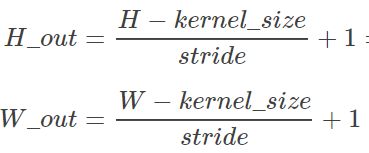
输出feature大小计算:
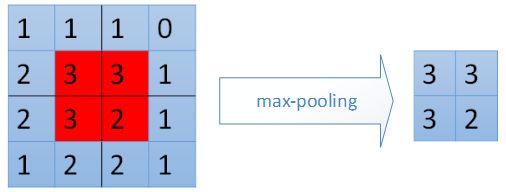
maxpool和mean pool的不同:
对于max-pooling,在前向计算时,是选取的每个22区域中的最大值,这里需要记录下最大值在每个小区域中的位置。在反向传播时,只有那个最大值对下一层有贡献,所以将残差传递到该最大值的位置,区域内其他22-1=3个位置置零。

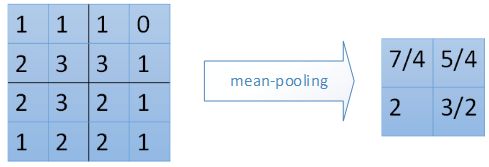
对于mean-pooling,我们需要把残差平均分成2*2=4份,传递到前边小区域的4个单元即可。具体过程如图:

算法实现:
#============================= 前向 =======================================================
import numpy as np
import torch
class MaxPool2D():
def __init__(self,x, kernel_size=(2, 2), stride=2):
self.stride = stride
self.kernel_size = kernel_size
self.w_height = kernel_size[0]
self.w_width = kernel_size[1]
self.x = x
self.in_height = None
self.in_width = None
self.out_height = None
self.out_width = None
self.arg_max = None
def forward(self, x):
self.x = x
self.out_height = int((self.in_height - self.w_height) / self.stride) + 1
self.out_width = int((self.in_width - self.w_width) / self.stride) + 1
N, C, H, W = self.x.shape #pytorch
out = np.zeros((N, C, self.out_height, self.out_width))
for i in range(self.out_height):
for j in range(self.out_width):
x_masked = in_data[:, :, i * self.stride: i * self.stride + self.kernel_size, j * self.stride: j * self.stride + self.kernel_size]
out[:, :, i, j] = np.max(x_masked, axis=(2, 3))
return out
def backward(self, d_loss):
dx = np.zeros_like(self.x)
for i in range(self.out_height):
for j in range(self.out_width):
start_i = i * self.stride
start_j = j * self.stride
end_i = start_i + self.w_height
end_j = start_j + self.w_width
#找到最大元素在原数组中的索引
index = np.unravel_index(out[i, j], self.kernel_size)
#将该loss传递到该位置
dx[start_i: end_i, start_j: end_j][index] = d_loss[i, j]
return dx
if __name__ == '__main__':
np.set_printoptions(precision=8, suppress=True, linewidth=120)
np.random.seed(123)
x_numpy = np.random.random((1, 1, 6, 8))
x_tensor = torch.tensor(x_numpy, requires_grad=True)
max_pool_tensor = torch.nn.MaxPool2d((2, 2), 2)
max_pool_numpy = MaxPool2D((2, 2), stride=2)
out_numpy = max_pool_numpy(x_numpy[0, 0])
out_tensor = max_pool_tensor(x_tensor)
d_loss_numpy = np.random.random(out_tensor.shape)
d_loss_tensor = torch.tensor(d_loss_numpy, requires_grad=True)
out_tensor.backward(d_loss_tensor)
dx_numpy = max_pool_numpy.backward(d_loss_numpy[0, 0])
dx_tensor = x_tensor.grad
print("out_numpy \n", out_numpy)
print("out_tensor \n", out_tensor.data.numpy())
print("dx_numpy \n", dx_numpy)
print("dx_tensor \n", dx_tensor.data.numpy())
#================================= 反向 ==================================================
5.实现Kmeans
算法步骤:
step1:创建k个点作为初始的质心点(随机选择)
step2:将所有点分配到k个簇中
step3:重新计算质心(簇的均值)
step4:再将所有点分配到新的质心
step5:重复上述步骤
算法实现:
from numpy import *
import time
import matplotlib.pyplot as plt
# calculate Euclidean distance
def euclDistance(vector1, vector2):
return sqrt(sum(power(vector2 - vector1, 2)))
# init centroids with random samples
def initCentroids(dataSet, k):
numSamples, dim = dataSet.shape
centroids = zeros((k, dim))
for i in range(k):
index = int(random.uniform(0, numSamples))
centroids[i, :] = dataSet[index, :]
return centroids
# k-means cluster
def kmeans(dataSet, k):
numSamples = dataSet.shape[0]
# first column stores which cluster this sample belongs to,
# second column stores the error between this sample and its centroid
clusterAssment = mat(zeros((numSamples, 2)))
clusterChanged = True
## step 1: init centroids
centroids = initCentroids(dataSet, k)
while clusterChanged:
clusterChanged = False
## for each sample
for i in xrange(numSamples):
minDist = 100000.0
minIndex = 0
## for each centroid
## step 2: find the centroid who is closest
for j in range(k):
distance = euclDistance(centroids[j, :], dataSet[i, :])
if distance < minDist:
minDist = distance
minIndex = j
## step 3: update its cluster
if clusterAssment[i, 0] != minIndex:
clusterChanged = True
clusterAssment[i, :] = minIndex, minDist**2
## step 4: update centroids
for j in range(k):
pointsInCluster = dataSet[nonzero(clusterAssment[:, 0].A == j)[0]]
centroids[j, :] = mean(pointsInCluster, axis = 0)
print 'Congratulations, cluster complete!'
return centroids, clusterAssment