【随机优化】李雅普诺夫优化在通信与排队系统中的应用(第三章)-动态规划示例
【参考书目】Stochastic Network Optimization with Application to Communication and Queueing Systems
【作者】(美)Michael J.Neely---University of Southern California
【出版社】MORGAN&CLAYPOOL PUBLISHERS
目录
稳定调度
S-ONLY算法和e最大
网络容量区(network capacity region)
用于稳定调度的李雅普诺夫漂移
“最小漂移(MIN-DRIFT)”或“最大权重(MAX-WEIGHT)”算法
迭代期望和伸缩和
稳定性和平均功率最小化
漂移加惩罚(DRIFT-PLUS-PENALTY)
漂移加惩罚(DRIFT-PLUS-PENALTY)算法的分析
最优化边界
问题的泛化
【优点】
漂移最小化方法使用当前信道状态和当前队列积压来稳定系统,并且不需要业务速率或信道概率的先验知识。
【系统模型】同第一章第二章
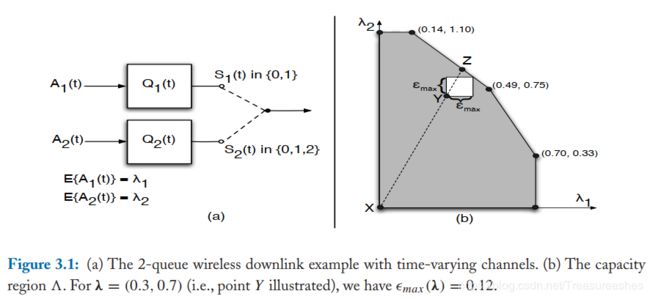
稳定调度
【假设】
![]() -----到达向量:是独立同分布的,且为包的整数单元
-----到达向量:是独立同分布的,且为包的整数单元
![]() ,
,![]() -----到达率定义
-----到达率定义
![]() ,
,![]() -----第二瞬间(the second moments)的定义,是有限的
-----第二瞬间(the second moments)的定义,是有限的
![]() -----信道向量:信道是时变的
-----信道向量:信道是时变的
![]() -----被转移的包的数量(非负)
-----被转移的包的数量(非负)
信道状态S1(t)与S2(t)是独立同分布的:

![]() -----传输决策,有三个可能的值:
-----传输决策,有三个可能的值:![]()
对应的动态等式:
![]()

-----提供服务的数量
S-ONLY算法和e最大
-----信道中六个可能的输出结果
S-ONLY调度算法仅基于观测到的S(t)作出决策,也可能通过观察S(t)的概率来作出决策。
![]() -----S-ONLY调度算法下的传输决策
-----S-ONLY调度算法下的传输决策
![]() -----在此种策略下最终的传输率,独立同分布
-----在此种策略下最终的传输率,独立同分布
对于每一个时隙:
 转存失败重新上传取消
转存失败重新上传取消![]() -----
-----![]()
只有满足:![]() 时队列1速率稳定
时队列1速率稳定
对于有限延迟,需要将传输速率设计为严格大于到达速率。
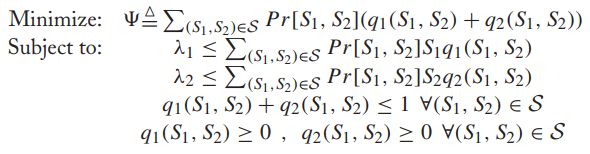
【问题规划】
![]()
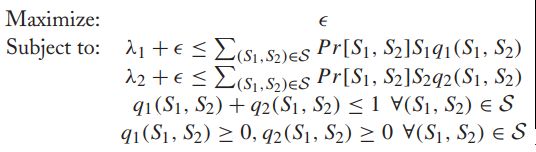
8个作为上述线性规划的限制的已知参数:![]()
13个作为上述线性规划的优化变量的未知参数:![]()
网络容量区(network capacity region)
![]() -----速率向量
-----速率向量
![]() ----表示速率向量之间距离的度量
----表示速率向量之间距离的度量
![]() -----满足
-----满足![]() 的所有非负的速率向量的集合
的所有非负的速率向量的集合
在网络容量区的S-ONLY调度算法
![]()
用于稳定调度的李雅普诺夫漂移
只要到达率向量在容量区域内部,它就提供了强稳定性。我们只需要证明满足上式的S - only算法的存在,而不需要求解该S - only算法定义中的13个变量。
![]() -----当前队列积压向量
-----当前队列积压向量
 -----李雅普诺夫函数,网络中队列拥塞的度量,具有如下性质:
-----李雅普诺夫函数,网络中队列拥塞的度量,具有如下性质:
- 当且仅当时隙t网络为空时它为0
- 它是小的说明两个队列的积压都小
- 它是大的说明至少有一个队列积压比较大
-----为什么利用二次项:拥有优势交叉项,包括排队积压和传输速率的内积
我们需要将Lyapunov函数持续推向低拥塞区域,先计算一个时隙中Lyapunov函数变化的界限:
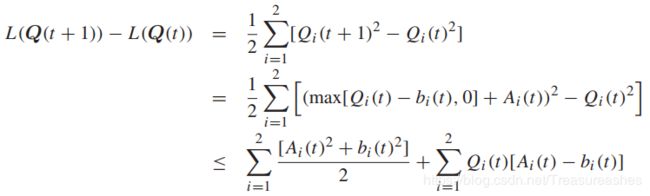
如果对于任意值都成立:![]()
则有:![]()
定义在时隙t下带条件的李雅普诺夫漂移:![]() 。式中的期望取决与控制策略,并与随机信道的状态和所做的(可能随机的)传输决策有关。
。式中的期望取决与控制策略,并与随机信道的状态和所做的(可能随机的)传输决策有关。
更常见的控制策略应该满足:

到达都是独立同分布的,即当前的队列积压都是独立的,所以有:![]()
对于所有可能的Q(t)及所有可能采取的决策,第一项会小于一个常数:
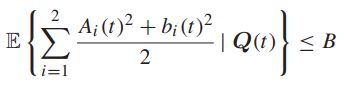
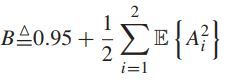
对于当前的系统模型,可以直接计算出来:

所以B可以定义为:
所以得到:

为了强调转移决策的重要性,将式子化为:

“最小漂移(MIN-DRIFT)”或“最大权重(MAX-WEIGHT)”算法
为了做出最好的转移决策来最小化漂移边界,因为它只影响到右边的最后一项,所以将问题转化为最大化:
利用机会地最大化期望的概念,将上述问题转化为最大化(最大权重算法):
对于只有三种决策的系统,对于每一个选项,很容易衡量出权重的总值:

最大权重算法选择在信道I上以Qi(t)Si(t)的最大(正)值进行传输,如果两个信道的该值都为0,则该算法保持空闲。
因为这个算法最大化权重总和,我们有:

![]() -----任何可能在时隙t做出的传输决策(可能是随机的)
-----任何可能在时隙t做出的传输决策(可能是随机的)
固定一个决策去比较,并取上述不等式的条件期望(给定Q(t))将会服从:

将上式直接插入上节最后的那个式子,得到:

整理一下:

![]() -----代表当转移决策做出后,所有信道可能提供的转移率
-----代表当转移决策做出后,所有信道可能提供的转移率
假定到达率在容量区域之内,并且考虑特定的转移决策可以选择了一个选项独立于队列积压,并服从于网络容量那节最后一个式子。因为信道状态是独立同分布的,并且转移率是独立于当前的信道状态。我们可以得到:

将此式插入上式,可得:
![]()
且其与线性规划问题相关,但我们不用解出来,只要知道这个线性规划问题的解存在即可。
迭代期望和伸缩和
将上式在随机的值上取期望:

带入定义式,得:
![]()
替换式子的左边:

利用伸缩和将各个时隙的值累加上:

将最大项分开,并利用![]() ,得到:
,得到:

假设![]() ,取一个极限的超量:
,取一个极限的超量:
因此,只要速率向量在网络容量区域内,所有的队列都是强稳定的,并且所有的队列积压小于右边。平均队列拥塞界限与速率向量离开容量区域边界的距离成反比。
![]() -----可以代替上式中的极限的超量:平均时间的队列积压
-----可以代替上式中的极限的超量:平均时间的队列积压
等待时间也可以根据利特尔定理计算出来:
实际的最大权重算法的性能比界限所建议的要好得多,可能的三个原因:
- 在计算Lyapunov漂移时使用了一个简单的上限
- B值在服务的第二时刻使用了一个上限
- 漂移不等式与不知道队列的S - only算法相比,而实际漂移要好得多,因为我们的算法考虑了队列积压
第三个原因通常在有很多队列的网络中占主导地位。例:如果使用不知道队列的算法,在具有一个服务器和开/关信道的N队列无线系统中的平均拥塞和延迟至少与N成比例
稳定性和平均功率最小化
系统模型同上
![]() -----因为转移决策而产生的功率消耗
-----因为转移决策而产生的功率消耗
![]() -----功率消耗是转移决策的函数
-----功率消耗是转移决策的函数

-----简单的函数示例
![]() -----对于容量区域给定的速率向量,使用S-only算法使得所有队列稳定的最小的平均功率消耗,可以通过解以下线性规划问题得出:
-----对于容量区域给定的速率向量,使用S-only算法使得所有队列稳定的最小的平均功率消耗,可以通过解以下线性规划问题得出:

可以看出:
![]() 是可以稳定系统的任何的控制策略(不论是不是S-only)下的最小平均功率消耗;
是可以稳定系统的任何的控制策略(不论是不是S-only)下的最小平均功率消耗;
它是连续的、凸的和入口非递减(entrywise non-decreasing)的
对于所有满足下式的e:![]()
若原速率向量属于容量区域,则可得:![]()
存在一个S-only算法使得所有的转移决策满足:
漂移加惩罚(DRIFT-PLUS-PENALTY)
当李雅普诺夫函数定义为:
则![]() 代表的是有条件的李雅普诺夫漂移。当采取措施使其界限最小化可以稳定系统,但由此产生的平均功率消耗可能会不必要的大。
代表的是有条件的李雅普诺夫漂移。当采取措施使其界限最小化可以稳定系统,但由此产生的平均功率消耗可能会不必要的大。
相比于简单地最小化有条件的李雅普诺夫漂移的界限,我们可以最小化漂移加惩罚的界限:
![]()
![]() -----一个参数,代表我们对功率消耗的权重
-----一个参数,代表我们对功率消耗的权重
类似上一节,我们得到式子:
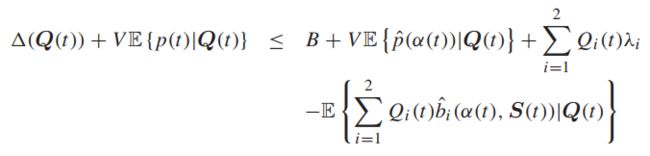
DRIFT-PLUS-PENALTY算法在每个时隙t都会观察![]() 与
与![]() 来最小化不等式的右边,与之前一样,利用机会最小化期望,我们需要贪婪地最小化下式:
来最小化不等式的右边,与之前一样,利用机会最小化期望,我们需要贪婪地最小化下式:

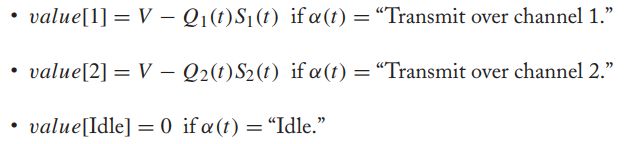
然后我们观察下式,找到一个转移决策使下面的值最小化:
漂移加惩罚(DRIFT-PLUS-PENALTY)算法的分析
由于我们每次都最小化右边,所以可以得到:
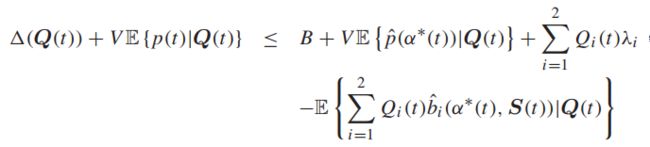
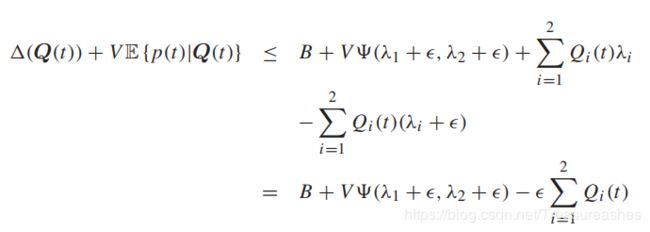
假设速率向量从属于容量区域,固定一个符合条件的e值。注意到转移决策独立于队列积压,把S-only算法插入左边:
利用迭代的期望:

把![]() 的每个时隙的加起来:
的每个时隙的加起来:
整理一下,一个根据VT分开,一个根据eT分开:

取极限得到:
最优化边界
因为上述两式对任意小于最大值的e都满足,所以我们可以分开地优化。把它的最大值插入上式,表示两个队列都是强稳定的。再使e=0使得:
【性能界限式1】

从上式可以看出,时间平均功率消耗不可能比![]() 小,且这个下确界需要满足所有的算法都实现稳定。
小,且这个下确界需要满足所有的算法都实现稳定。
因为![]() 所以
所以![]()
这表明至少需要一个单元的能量去支持每个新来的包,所以增加了总的输入率,同时需要的最小平均功率至少增加了2e。将上式插入上一小节的最后一个式子,得到对于每一个小于最大值的e值都满足的式子:
对于最大值,则有:
【性能界限式2】
两个性能界限式展示了[O(1/V),O(V)]功率积压权衡:我们可以使用任意大的V来使B/V任意小,因此【性能界限式1】意味着时间平均功率p任意接近最佳值(λ1,λ2 )。这需要权衡:在【性能界限式2】中绑定的平均队列积压是O(V)。
仿真略过。
问题的泛化
2队列系统可以被一个更大的K队列的系统替换。
事实上,最小漂移(MIN-DRIFT)算法可以泛化为选择一个转移决策最大化:
![]()
![]()
这些对更一般的信道状态、更一般的资源分配决策、更一般的随机速率函数以及更一般的惩罚函数都支持。
特殊化的例子:
![]() -----可以有不确定的可能的输出状态数量
-----可以有不确定的可能的输出状态数量
![]() -----可以有不确定的可能的功率分配,也可以代表更复杂的物理层操作,如调制、编码、波束形成等。
-----可以有不确定的可能的功率分配,也可以代表更复杂的物理层操作,如调制、编码、波束形成等。
![]() -----可以是把信道状态和资源分配映射到转移率的任意函数
-----可以是把信道状态和资源分配映射到转移率的任意函数
![]() -----惩罚函数不一定是代表功率,也可以是任意关于分配决策的任意函数
-----惩罚函数不一定是代表功率,也可以是任意关于分配决策的任意函数