TCP/IP协议栈之lwIP
简介
lwIP(light-weight IP)最初由瑞典计算机科学院(Swedish Institute of Computer Science)的Adam Dunkels开发,现在由Kieran Mansley领导的一个全球开发团队开发、维护的一套用于嵌入式系统的开放源代码TCP/IP协议栈,它在包含完整的TCP协议的基础上实现了小型化的资源占用,因此它十分适合于应用到嵌入式设备中,其占用的资源体积RAM大概为几十kB,ROM大概为40KB。
lwIP结构精简,功能完善,因而用户群较为广泛。RT-Thread实时操作系统就采用了lwIP做为默认的TCP/IP协议栈,同时根据小型设备的特点对lwIP进行了再次优化,使其资源占用体积进一步地缩小,RAM 的占用可缩小到5kB附近(未计算上层应用使用TCP/IP协议时的空间占用量)。本章内容将为您讲述lwIP在RT-Thread中的使用方法。
主要特性(摘自lwIP官方网站):
- 协议:IP,ICMP,UDP,TCP,IGMP,ARP,PPPoS,PPPoE
- DHCP client,DNS client,AutoIP/APIPA(Zeroconf),SNMP agent(private MIB support)
- APIs:专门针对增强性能实现的API接口,可选的类BSD的Socket API。
- 延伸的特点:多个网络接口的IP转发,TCP拥塞控制,RTT往返时间估算、快速恢复和快速重传
协议分层
可能大家对OSI七层模型并不陌生,它将网络协议很细致地从逻辑上分为了7层。但是实际运用中并不是按七层模型,一般大家都只使用5层模型。如下: 物理层:一般包括物理媒介,电信号,光信号等,主要对应于PHY芯片,PHY芯片将数据传送给物理媒介(RJ45座->双绞线),如图:

- 数据链路层:一般简单称为MAC层,因为MAC芯片处于这层,对应于代码中的网卡驱动层。数据包在这一层一般称之为“以太网帧”。
- 网络层:对应于代码中IP层。
- 传输层:对应于代码中TCP层。
- 应用层:对应于代码中应用层数据,即SOCKET通信,recv()/send()的数据。
对于一个以太网数据包,我们在代码中能真实看到的包括4部分,分别对应链路层、网络层、传输层、应用层,如下图:
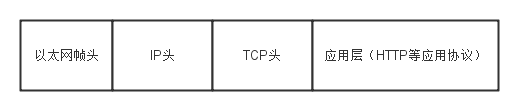
注:有几个概念需要解释一下,从网卡收到的数据,此时是一个完整的包含各层头的数据包,此时称之为“以太网帧”;当解开以太网帧头到达IP层,称之为“IP Packet(IP数据包)”;当解开IP头到达TCP层,称之为“TCP Segment(TCP分片)”;当解开TCP头时到达应用层,就是我们socket通信看到的数据了。
这种分层的设计作为一个协议设计与实现的向导,在这种方式下,每个协议可以分离地实现,互不干扰。然而严格的分层设计,各层间的通讯可能会导致总体的性能下降。为了克服这些问题,协议的某些内部细节可以被其他的协议共享,但是必须注意,只有重要的信息才能在各层间共享。
大部分的TCP/IP协议栈实现在应用层到底层之间都遵循严格的分层设计,然而底层或多或少可以有交叉。在大多数操作系统中,所有的底层协议都与操作系统的内核绑定在一起(成为OS内核的一部分),内核提供入口点(API)与应用层的进程通信。此时,应用程序可认为是TCP/IP协议栈的一个抽象,不用关心底层的细节,对于支持SOCKET的系统,直接使用SOCKET进行网络通信即可,这些操作基本和文件IO的操作差别不大。这意味着应用程序对底层一无所知,比如底层使用buffer缓冲数据,而应用层无法对buffer一无所知,如果有应用层有一部分数据频繁使用,而它是无法操作buffer将频繁使用的数据缓冲起来。
在最小系统中,一般不会严格地在内核和应用程序中间加一道保护屏障,如此应用程序可以使用共享内存(底层在内核中,与内核共享内存)的方式更轻松地与底层通信。具体来讲,应用层知道底层使用的缓冲处理机制,因此,应用层可以更高效的重用buffer。既然应用层可以和底层协议使用同一段内存,这样也可以节省拷贝带来的开销。
lwIP不遵循严格的分层
上面提到过TCP/IP的标准实现一般使用严格的分层,这对lwIP的设计与实现提供了指导意义。每个协议作为一个单独地模块,提供一些API作为协议的入口点。尽管这些协议都单独地实现,但是一些层(协议之间)违背了严格的分层标准,这样做是为了提高处理的速度和内存的占用。比如:在TCP分片的报文中,为了计算TCP校验和,我们需要知道IP协议层的源IP地址和目的IP地址,一般我们会构造一个伪的IP头(包含IP地址信息等),而常规的做法是通过IP协议层提供的API去获得这些IP地址,但是lwIP是拿到数据报文的IP头,从中解析得到IP地址。
操作系统模拟层(OS emulation layer)
不同的操作系统,提供不同的通信机制,而且这些通信的方法实现也不同,增加操作系统模拟层,将操作系统相关的功能函数和数据结构放在这一层中(对应于代码sys.c/h),这一层提供诸如创建lwIP进程,延时,互斥锁,信号量,邮箱等相关的函数。如下:
// Creates a new thread
sys_thread_t sys_thread_new(const char *name, lwip_thread_fn thread,
void *arg, int stacksize, int prio);
/** Create a new mutex
* @param mutex pointer to the mutex to create
* @return a new mutex */
err_t sys_mutex_new(sys_mutex_t *mutex);
/** Delete a semaphore
* @param mutex the mutex to delete */
void sys_mutex_free(sys_mutex_t *mutex);
#ifndef sys_msleep
void sys_msleep(u32_t ms); /* only has a (close to) 1 jiffy resolution. */
#endif
/* Mailbox functions. */
/** Create a new mbox of specified size
* @param mbox pointer to the mbox to create
* @param size (miminum) number of messages in this mbox
* @return ERR_OK if successful, another err_t otherwise */
err_t sys_mbox_new(sys_mbox_t *mbox, int size);一般说来,移植到其他操作系统上时,实现这些接口即可,但是在实际的移植过程中还需要做一些细节处理。
RT-Thread中的lwIP
由于原版的lwIP更适合于在无操作系统的情况下运行,所以RT-Thread在移植lwIP的过程中根据RT-Thread的特点进行了适当调整。其结构如下图所示:
RT-Thread操作系统中的lwIP是从lwIP发布原始版本移植过来,然后添加了设备层以替换原来的驱动层。不同于原版,这里RT-Thread对于以太网数据的收发采用了独立的双线程(erx线程与etx线程)结构:
- erx线程用于以太网报文的接收──当以太网硬件设备收到网络报文产生中断时,中断服务例程将会通过邮箱的形式唤醒erx线程,让erx线程主动进行以太网报文收取过程,当erx线程收到有效网络报文后,它通过邮箱的形式通知给LwIP的主线程(tcp线程);
- tcp的发送操作则是通过邮箱的形式唤醒etx线程进行实际的以太网硬件写入。在正常情况下,erx线程和etx线程的优先级是相同的,用户可以根据自身实际要求进行微调以侧重接收或发送。
lwIP版本
RT-Thread lwIP包含三个版本,分别为:“1.3.2”,“1.4.1”,“2.0.2”,在RT-Thread 3.0版本中默认会选择“2.0.2”版本,lwIP的具体版本号信息可以在src/include/lwip/init.h中查询。如下:
/** X.x.x: Major version of the stack */
#define LWIP_VERSION_MAJOR 1U
/** x.X.x: Minor version of the stack */
#define LWIP_VERSION_MINOR 4U
/** x.x.X: Revision of the stack */
#define LWIP_VERSION_REVISION 1URT-Thread通过宏去指定使用哪个版本的lwIP,熟悉RT-Thread的朋友都知道一般都是使用scons工具(类linux下的make工具)生成项目工程文件(MDK工程、IAR工程等),因此在每个版本的文件夹中包含了一个SConscript文件,该文件中会依赖与相应的宏加入到工程文件中,以lwIP1.4.1中的SConscript为例:
group = DefineGroup('LwIP', src, depend = ['RT_USING_LWIP', 'RT_USING_LWIP141'], CPPPATH = path)大家可以看到加入该版本下的所有文件依赖与(RT_USING_LWIP、RT_USING_LWIP141)两个宏,这两个宏在RT-Thread源码的rtconfig.h中,这个文件与实际的项目(或者说BSP、开发板相关),点开“bsp”目录下任何一个文件夹都可以找到rtconfig.h,也可以由menuconfig配置后生成对应的rtconfig.h头文件。
RT-Thread 网络设备管理
RT-Thread有一套自己的设备框架,这里只作一个简单的描述。RT-Thread中包含很多设备,为了更简单的添加或者管理这些设备,使用面向对象的思想将设备抽象成了一个类,基于这个“设备类”,派生出不同类型的设备类,如:网络设备类、字符设备类、块设备类、音频设备类等等,它们的关系图如下:
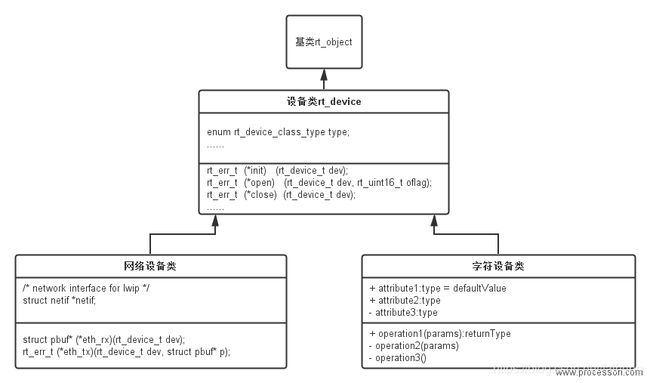
除基类以外,其他继承自基类的类分别加上了与基类不同的属性和接口,比如设备类中就添加了基类没有的设备初始化,打开,关闭的接口和设备类型的属性。
有了这个概念接着说RT-Thread中设备的管理,RT-Thread中有一个数组,里面为每一种对象(信号、邮箱、设备、定时器)分配了一个链表(用结构体封装了),如下:
struct rt_object_information
{
enum rt_object_class_type type; /**< object class type*/
rt_list_t object_list; /**< object list */
rt_size_t object_size; /**< object size */
};
struct rt_object_information rt_object_container[RT_Object_Class_Unknown] =
{
/* initialize object container - thread */
{
RT_Object_Class_Thread, _OBJ_CONTAINER_LIST_INIT(RT_Object_Class_Thread),
sizeof(struct rt_thread)
},
#ifdef RT_USING_SEMAPHORE
/* initialize object container - semaphore */
{
RT_Object_Class_Semaphore,
_OBJ_CONTAINER_LIST_INIT(RT_Object_Class_Semaphore),
sizeof(struct rt_semaphore)
},
#endif
#ifdef RT_USING_MUTEX
/* initialize object container - mutex */
{
RT_Object_Class_Mutex, _OBJ_CONTAINER_LIST_INIT(RT_Object_Class_Mutex),
sizeof(struct rt_mutex)
},
#endif
#ifdef RT_USING_EVENT
/* initialize object container - event */
{
RT_Object_Class_Event, _OBJ_CONTAINER_LIST_INIT(RT_Object_Class_Event),
sizeof(struct rt_event)
},
#endif
#ifdef RT_USING_MAILBOX
/* initialize object container - mailbox */
{
RT_Object_Class_MailBox, _OBJ_CONTAINER_LIST_INIT(RT_Object_Class_MailBox),
sizeof(struct rt_mailbox)
},
#endif
#ifdef RT_USING_MESSAGEQUEUE
/* initialize object container - message queue */
{
RT_Object_Class_MessageQueue,
_OBJ_CONTAINER_LIST_INIT(RT_Object_Class_MessageQueue),
sizeof(struct rt_messagequeue)
},
#endif
#ifdef RT_USING_MEMHEAP
/* initialize object container - memory heap */
{
RT_Object_Class_MemHeap, _OBJ_CONTAINER_LIST_INIT(RT_Object_Class_MemHeap),
sizeof(struct rt_memheap)
},
#endif
#ifdef RT_USING_MEMPOOL
/* initialize object container - memory pool */
{
RT_Object_Class_MemPool, _OBJ_CONTAINER_LIST_INIT(RT_Object_Class_MemPool),
sizeof(struct rt_mempool)
},
#endif
#ifdef RT_USING_DEVICE
/* initialize object container - device */
{
RT_Object_Class_Device, _OBJ_CONTAINER_LIST_INIT(RT_Object_Class_Device),
sizeof(struct rt_device)
},
#endif
/* initialize object container - timer */
{
RT_Object_Class_Timer, _OBJ_CONTAINER_LIST_INIT(RT_Object_Class_Timer),
sizeof(struct rt_timer)
},
#ifdef RT_USING_MODULE
/* initialize object container - module */
{
RT_Object_Class_Module, _OBJ_CONTAINER_LIST_INIT(RT_Object_Class_Module),
sizeof(struct rt_module)
},
#endif
};具体地讲,RT-Thread中使用一个链表来维护所有的设备,当需要往系统中注册设备时,需要将设备添加到对应的链表中(当然如何添加,RT-Thread提供了相应的接口)。如果对代码不了解,简单点的理解方式请看下图(图中并不对应实际的代码,代码中用的双向链表):
从图中可知,当系统需要操作网卡时,直接遍历这个链表即可。
RT-Thread lwIP有哪些变化
- 上面提到过,将sys.c/h中的接口实现基本的移植工作就完成了,细心的读者可能会拿RT-Thread中lwIP这部分源码与lwIP官方的源码做一个对比,然后会发现RT-Thread增加一个“arch”目录,这部分代码主要实现了前面提到的信号量、互斥锁、邮箱等sys.h文件中的接口,另外RT-Thread根据其系统自身增加了lwIP的初始化工作,如下:
/** * LwIP system initialization */ void lwip_system_init(void) { rt_err_t rc; struct rt_semaphore done_sem; /* set default netif to NULL */ netif_default = RT_NULL; // 初始化信号量 rc = rt_sem_init(&done_sem, "done", 0, RT_IPC_FLAG_FIFO); if (rc != RT_EOK) { LWIP_ASSERT("Failed to create semaphore", 0); return; } /*这是关键代码,调用sys_thread_new()创建lwIP线程,并回调tcpip_init_done_callback()初始化网卡设备的IP、子网掩码、网关,并设置系统中默认使用的网卡设备。如果查询到当前系统中没有网卡设备,则返回。(大家可能会有疑问,没有网卡设备怎么办?答:还会有其他的地方以添加网卡设备并初始化)。*/ tcpip_init(tcpip_init_done_callback, (void *)&done_sem); //等待tcpip_init_done_callback()初始化完成 /* waiting for initialization done */ if (rt_sem_take(&done_sem, RT_WAITING_FOREVER) != RT_EOK) { rt_sem_detach(&done_sem); return; } // 将此信号量从系统的信号量对象链表中删除 rt_sem_detach(&done_sem); /* set default ip address */ #if !LWIP_DHCP //如果未启用DHCP,即表示使用静态IP,则配置默认网卡的IP、子网掩码、网关 if (netif_default != RT_NULL) //上面提到过,如果此时系统还未注册网卡设备,这部分代码也不执行。 { struct ip_addr ipaddr, netmask, gw; IP4_ADDR(&ipaddr, RT_LWIP_IPADDR0, RT_LWIP_IPADDR1, RT_LWIP_IPADDR2, RT_LWIP_IPADDR3); IP4_ADDR(&gw, RT_LWIP_GWADDR0, RT_LWIP_GWADDR1, RT_LWIP_GWADDR2, RT_LWIP_GWADDR3); IP4_ADDR(&netmask, RT_LWIP_MSKADDR0, RT_LWIP_MSKADDR1, RT_LWIP_MSKADDR2, RT_LWIP_MSKADDR3); netifapi_netif_set_addr(netif_default, &ipaddr, &netmask, &gw); } #endif }这段代码的解释通过注释的方式,大家请参照代码旁边的注释。
单纯在RT-Thread中完成lwIP初始化和创建lwIP线程的工作还是不够的,因为要让协议栈与外界通信,系统必须可以收发数据,所以还需要硬件驱动的支持,这时牵扯到RT-Thread收发包的设计和网卡驱动。这部分的整体框架如下图:

由此可知,RT-Thread中将lwIP应用起来主要包括三个核心步骤:1. 创建收发包线程,调用接口eth_system_device_init()。2. 提供网卡驱动,调用网卡初始化函数,注册网卡设备。(驱动不同相应的接口函数可能不同)3. 初始化lwIP,创建lwIP线程,调用接口lwip_sys_init()(实际调用的lwip_system_init())。
至此,三个步骤完成之后,应用层便可以直接与外界通讯。
RT-Thread lwIP相关代码补充说明
前面已经提及过lwip_system_init()中,当系统中没有网卡设备时,有一部分初始化工作(为网卡初始化IP、子网掩码、网关等)是不会进行的。此时lwIP线程已经创建,如果需要和外界通讯,那么必须为系统添加网卡设备,而在网卡驱动中,网卡设备初始化时,会向系统注册,此时网卡设备就添加到系统中了。参考以下代码:
#ifdef USING_MAC0
/* set autonegotiation mode */
fm3_emac_device0.phy_mode = EMAC_PHY_AUTO;
fm3_emac_device0.FM3_ETHERNET_MAC = FM3_ETHERNET_MAC0;
fm3_emac_device0.ETHER_MAC_IRQ = ETHER_MAC0_IRQn;
// OUI 00-00-0E FUJITSU LIMITED
fm3_emac_device0.dev_addr[0] = 0x00;
fm3_emac_device0.dev_addr[1] = 0x00;
fm3_emac_device0.dev_addr[2] = 0x0E;
/* set mac address: (only for test) */
fm3_emac_device0.dev_addr[3] = 0x12;
fm3_emac_device0.dev_addr[4] = 0x34;
fm3_emac_device0.dev_addr[5] = 0x56;
fm3_emac_device0.parent.parent.init = fm3_emac_init;
fm3_emac_device0.parent.parent.open = fm3_emac_open;
fm3_emac_device0.parent.parent.close = fm3_emac_close;
fm3_emac_device0.parent.parent.read = fm3_emac_read;
fm3_emac_device0.parent.parent.write = fm3_emac_write;
fm3_emac_device0.parent.parent.control = fm3_emac_control;
fm3_emac_device0.parent.parent.user_data = RT_NULL;
fm3_emac_device0.parent.eth_rx = fm3_emac_rx;
fm3_emac_device0.parent.eth_tx = fm3_emac_tx;
/* init tx buffer free semaphore */
rt_sem_init(&fm3_emac_device0.tx_buf_free, "tx_buf0", EMAC_TXBUFNB,
RT_IPC_FLAG_FIFO);
// 关键代码,驱动向系统注册网卡设备
eth_device_init(&(fm3_emac_device0.parent), "e0");
#endif /* #ifdef USING_MAC0 */eth_device_init()调用eth_device_init_with_flag()接口初始化网卡设备(为网卡添加名称,IP、子网掩码、网关,网卡设备使用的发包和收包接口函数等),并向系统注册网卡设备。到此,解释了一个现象:网卡驱动初始化和lwIP的初始化顺序互换并无影响。
网络编程示例
UDP使用示例
下面是一个在RT-Thread上使用BSD socket接口的UDP服务端例子,当把这个代码加入到RT-Thread操作系统时,它会自动向finsh命令行添加一个udpserv命令,在finsh上执行udpserv()函数即可启动这个UDP服务端,该UDP服务端在端口5000上进行监听。
当服务端接收到数据时,它将把数据打印到控制终端中;如果服务端接收到exit字符串时,那么服务端将退出服务。
/*
* 代码清单:UDP服务端例子
*/
#include
#include /* 使用BSD socket,需要包含sockets.h头文件 */
void udpserv(void* paramemter)
{
int sock;
int bytes_read;
char *recv_data;
rt_uint32_t addr_len;
struct sockaddr_in server_addr, client_addr;
/* 分配接收用的数据缓冲 */
recv_data = rt_malloc(1024);
if (recv_data == RT_NULL)
{
/* 分配内存失败,返回 */
rt_kprintf("No memory\n");
return;
}
/* 创建一个socket,类型是SOCK_DGRAM,UDP类型 */
if ((sock = socket(AF_INET, SOCK_DGRAM, 0)) == -1)
{
rt_kprintf("Socket error\n");
/* 释放接收用的数据缓冲 */
rt_free(recv_data);
return;
}
/* 初始化服务端地址 */
server_addr.sin_family = AF_INET;
server_addr.sin_port = htons(5000);
server_addr.sin_addr.s_addr = INADDR_ANY;
rt_memset(&(server_addr.sin_zero), 0, sizeof(server_addr.sin_zero));
/* 绑定socket到服务端地址 */
if (bind(sock, (struct sockaddr *) &server_addr, sizeof(struct sockaddr))
== -1)
{
/* 绑定地址失败 */
rt_kprintf("Bind error\n");
/* 释放接收用的数据缓冲 */
rt_free(recv_data);
return;
}
addr_len = sizeof(struct sockaddr);
rt_kprintf("UDPServer Waiting for client on port 5000...\n");
while (1)
{
/* 从sock中收取最大1024字节数据 */
bytes_read = recvfrom(sock, recv_data, 1024, 0,
(struct sockaddr *) &client_addr, &addr_len);
/* UDP不同于TCP,它基本不会出现收取的数据失败的情况,除非设置了超时等待 */
recv_data[bytes_read] = '\0'; /* 把末端清零 */
/* 输出接收的数据 */
rt_kprintf("\n(%s , %d) said : ", inet_ntoa(client_addr.sin_addr),
ntohs(client_addr.sin_port));
rt_kprintf("%s", recv_data);
/* 如果接收数据是exit,退出 */
if (strcmp(recv_data, "exit") == 0)
{
lwip_close(sock);
/* 释放接收用的数据缓冲 */
rt_free(recv_data);
break;
}
}
return;
}
#ifdef RT_USING_FINSH
#include
/* 输出udpserv函数到finsh shell中 */
FINSH_FUNCTION_EXPORT(udpserv, startup udp server);
#endif 下面是另一个在RT-Thread上使用BSD socket接口的UDP客户端例子。当把这个代码加入到RT-Thread时,它会自动向finsh命令行添加一个udpclient命令,在finsh上执行udpclient(url,port)函数即可启动这个UDP客户端,url指定了这个客户端连接到的服务端地址或域名,port是相应的端口号。
当UDP客户端启动后,它将连续发送5次“This is UDP Client from RT-Thread.”的字符串给服务端,然后退出。
/*
* 程序清单:UDP客户端例子
*/
#include
#include /* 为了解析主机名,需要包含netdb.h头文件 */
#include /* 使用BSD socket,需要包含sockets.h头文件 */
/* 发送用到的数据 */
ALIGN(4)
const char send_data[] = "This is UDP Client from RT-Thread.\n";
void udpclient(const char* url, int port, int count)
{
int sock;
struct hostent *host;
struct sockaddr_in server_addr;
/* 通过函数入口参数url获得host地址(如果是域名,会做域名解析) */
host = (struct hostent *) gethostbyname(url);
/* 创建一个socket,类型是SOCK_DGRAM,UDP类型 */
if ((sock = socket(AF_INET, SOCK_DGRAM, 0)) == -1)
{
rt_kprintf("Socket error\n");
return;
}
/* 初始化预连接的服务端地址 */
server_addr.sin_family = AF_INET;
server_addr.sin_port = htons(port);
server_addr.sin_addr = *((struct in_addr *) host->h_addr);
rt_memset(&(server_addr.sin_zero), 0, sizeof(server_addr.sin_zero));
/* 总计发送count次数据 */
while (count)
{
/* 发送数据到服务远端 */
sendto(sock, send_data, strlen(send_data), 0,
(struct sockaddr *) &server_addr, sizeof(struct sockaddr));
/* 线程休眠一段时间 */
rt_thread_delay(50);
/* 计数值减一 */
count--;
}
/* 关闭这个socket */
lwip_close(sock);
}
#ifdef RT_USING_FINSH
#include
/* 输出udpclient函数到finsh shell中 */
FINSH_FUNCTION_EXPORT(udpclient, startup udp client);
#endif TCP使用示例
下面是一个在RT-Thread上使用BSD socket接口的TCP服务端例子。当把这个代码加入到RT-Thread时,它会自动向finsh命令行添加一个tcpserv命令,在finsh上执行tcpserv()函数即可启动这个TCP服务端,该TCP服务端在端口5000上进行监听。当有TCP客户向这个服务端进行连接后,只要服务端接收到数据,它就会立即向客户端发送“This is TCP Server from RT-Thread.”的字符串。
如果服务端接收到q或Q字符串时,服务器将主动关闭这个TCP连接。如果服务端接收到exit字符串时,那么将退出服务。
/*
* 程序清单:TCP服务端例子
*/
#include
#include /* 使用BSD Socket接口必须包含sockets.h这个头文件 */
/* 发送用到的数据 */
ALIGN(4)
static const char send_data[] = "This is TCP Server from RT-Thread.";
void tcpserv(void* parameter)
{
char *recv_data; /* 用于接收的指针,后面会做一次动态分配以请求可用内存 */
rt_uint32_t sin_size;
int sock, connected, bytes_received;
struct sockaddr_in server_addr, client_addr;
int ret;
rt_bool_t stop = RT_FALSE; /* 停止标志 */
recv_data = rt_malloc(1024); /* 分配接收用的数据缓冲 */
if (recv_data == RT_NULL)
{
rt_kprintf("No memory\n");
return;
}
/* 一个socket在使用前,需要预先创建出来,指定SOCK_STREAM为TCP的socket */
if ((sock = socket(AF_INET, SOCK_STREAM, 0)) == -1)
{
/* 创建失败的错误处理 */
rt_kprintf("Socket error\n");
/* 释放已分配的接收缓冲 */
rt_free(recv_data);
return;
}
/* 初始化服务端地址 */
server_addr.sin_family = AF_INET;
server_addr.sin_port = htons(5000); /* 服务端工作的端口 */
server_addr.sin_addr.s_addr = INADDR_ANY;
rt_memset(&(server_addr.sin_zero), 8, sizeof(server_addr.sin_zero));
/* 绑定socket到服务端地址 */
if (bind(sock, (struct sockaddr *) &server_addr, sizeof(struct sockaddr))
== -1)
{
/* 绑定失败 */
rt_kprintf("Unable to bind\n");
/* 释放已分配的接收缓冲 */
rt_free(recv_data);
return;
}
/* 在socket上进行监听 */
if (listen(sock, 5) == -1)
{
rt_kprintf("Listen error\n");
/* release recv buffer */
rt_free(recv_data);
return;
}
rt_kprintf("\nTCPServer Waiting for client on port 5000...\n");
while (stop != RT_TRUE)
{
sin_size = sizeof(struct sockaddr_in);
/* 接受一个客户端连接socket的请求,这个函数调用是阻塞式的 */
connected = accept(sock, (struct sockaddr *) &client_addr, &sin_size);
/* 返回的是连接成功的socket */
/* 接受返回的client_addr指向了客户端的地址信息 */
rt_kprintf("I got a connection from (%s , %d)\n", inet_ntoa(
client_addr.sin_addr), ntohs(client_addr.sin_port));
/* 客户端连接的处理 */
while (1)
{
/* 发送数据到connected socket */
ret = send(connected, send_data, strlen(send_data), 0);
if (ret < 0)
{
/* 接收失败,关闭这个连接 */
lwip_close(sock);
rt_kprintf("\nsend error,close the socket.\r\n");
break;
}
else if (ret == 0)
{
/* 打印send函数返回值为0的警告信息 */
rt_kprintf("\n Send warning,send function return 0.\r\n");
}
/*
* 从connected socket中接收数据,接收buffer是1024大小,
* 但并不一定能够收到1024大小的数据
*/
bytes_received = recv(connected, recv_data, 1024, 0);
if (bytes_received < 0)
{
/* 接收失败,关闭这个connected socket */
lwip_close(connected);
break;
}
else if (bytes_received == 0)
{
/* 打印recv函数返回值为0的警告信息 */
rt_kprintf("\nReceived warning,recv function return 0.\r\n");
}
/* 有接收到数据,把末端清零 */
recv_data[bytes_received] = '\0';
if (strcmp(recv_data, "q") == 0 || strcmp(recv_data, "Q") == 0)
{
/* 如果是首字母是q或Q,关闭这个连接 */
lwip_close(connected);
break;
}
else if (strcmp(recv_data, "exit") == 0)
{
/* 如果接收的是exit,则关闭整个服务端 */
lwip_close(connected);
stop = RT_TRUE;
break;
}
else
{
/* 在控制终端显示收到的数据 */
rt_kprintf("RECIEVED DATA = %s \n", recv_data);
}
}
}
/* 退出服务 */
lwip_close(sock);
/* 释放接收缓冲 */
rt_free(recv_data);
return;
}
#ifdef RT_USING_FINSH
#include
/* 输出tcpserv函数到finsh shell中 */
FINSH_FUNCTION_EXPORT(tcpserv, startup tcp server);
#endif 下面则是另一个如在RT-Thread上使用BSD socket接口的TCP客户端例子。当把这个代码加入到RT-Thread时,它会自动向finsh 命令行添加一个tcpclient命令,在finsh上执行tcpclient(url,port)函数即可启动这个TCP服务端,url指定了这个客户端连接到的服务端地址或域名,port是相应的端口号。当TCP客户端连接成功时,它会接收服务端传过来的数据。当有数据接收到时,如果是以q或Q开头,它将主动断开这个连接;否则会把接收的数据在控制终端中打印出来,然后发送“This is TCP Client from RT-Thread.”的字符串。
/*
* 程序清单:TCP客户端例子
*/
#include
#include /* 为了解析主机名,需要包含netdb.h头文件 */
#include /* 使用BSD socket,需要包含sockets.h头文件 */
/* 发送用到的数据 */
ALIGN(4)
static const char send_data[] = "This is TCP Client from RT-Thread.";
void tcpclient(const char* url, int port)
{
char *recv_data;
struct hostent *host;
int sock, bytes_received;
struct sockaddr_in server_addr;
int ret;
/* 通过函数入口参数url获得host地址(如果是域名,会做域名解析) */
host = gethostbyname(url);
/* 分配用于存放接收数据的缓冲 */
recv_data = rt_malloc(1024);
if (recv_data == RT_NULL)
{
rt_kprintf("No memory\n");
return;
}
/* 创建一个socket,类型是SOCKET_STREAM,TCP类型 */
if ((sock = socket(AF_INET, SOCK_STREAM, 0)) == -1)
{
/* 创建socket失败 */
rt_kprintf("Socket error\n");
/* 释放接收缓冲 */
rt_free(recv_data);
return;
}
/* 初始化预连接的服务端地址 */
server_addr.sin_family = AF_INET;
server_addr.sin_port = htons(port);
server_addr.sin_addr = *((struct in_addr *) host->h_addr);
rt_memset(&(server_addr.sin_zero), 0, sizeof(server_addr.sin_zero));
/* 连接到服务端 */
if (connect(sock, (struct sockaddr *) &server_addr,
sizeof(struct sockaddr)) == -1)
{
/* 连接失败 */
rt_kprintf("Connect error\n");
/*释放接收缓冲 */
rt_free(recv_data);
return;
}
while (1)
{
/* 从sock连接中接收最大1024字节数据 */
bytes_received = recv(sock, recv_data, 1024, 0);
if (bytes_received < 0)
{
/* 接收失败,关闭这个连接 */
lwip_close(sock);
/* 释放接收缓冲 */
rt_free(recv_data);
break;
}
else if (bytes_received == 0)
{
/* 打印recv函数返回值为0的警告信息 */
rt_kprintf("\nReceived warning,recv function return 0. \r\n");
}
/* 有接收到数据,把末端清零 */
recv_data[bytes_received] = '\0';
if (strcmp(recv_data, "q") == 0 || strcmp(recv_data, "Q") == 0)
{
/* 如果是首字母是q或Q,关闭这个连接 */
lwip_close(sock);
/* 释放接收缓冲 */
rt_free(recv_data);
break;
}
else
{
/* 在控制终端显示收到的数据 */
rt_kprintf("\nRecieved data = %s ", recv_data);
}
/* 发送数据到sock连接 */
ret = send(sock, send_data, strlen(send_data), 0);
if (ret < 0)
{
/* 接收失败,关闭这个连接 */
lwip_close(sock);
rt_kprintf("\nsend error,close the socket.\r\n");
break;
}
else if (ret == 0)
{
/* 打印send函数返回值为0的警告信息 */
rt_kprintf("\n Send warning,send function return 0. \r\n");
}
}
return;
}
#ifdef RT_USING_FINSH
#include
/* 输出tcpclient函数到finsh shell中 */
FINSH_FUNCTION_EXPORT(tcpclient, startup tcp client);
#endif