利用MATLAB解决现代控制理论的计算问题(这一篇文章就够了)
一、应用MATLAB建立线性系统状态空间描述
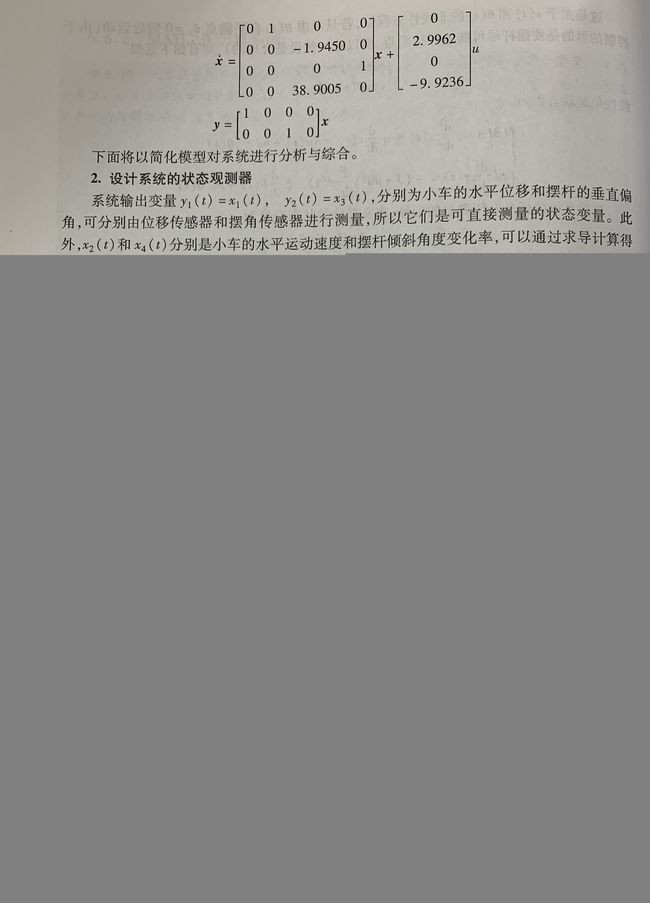
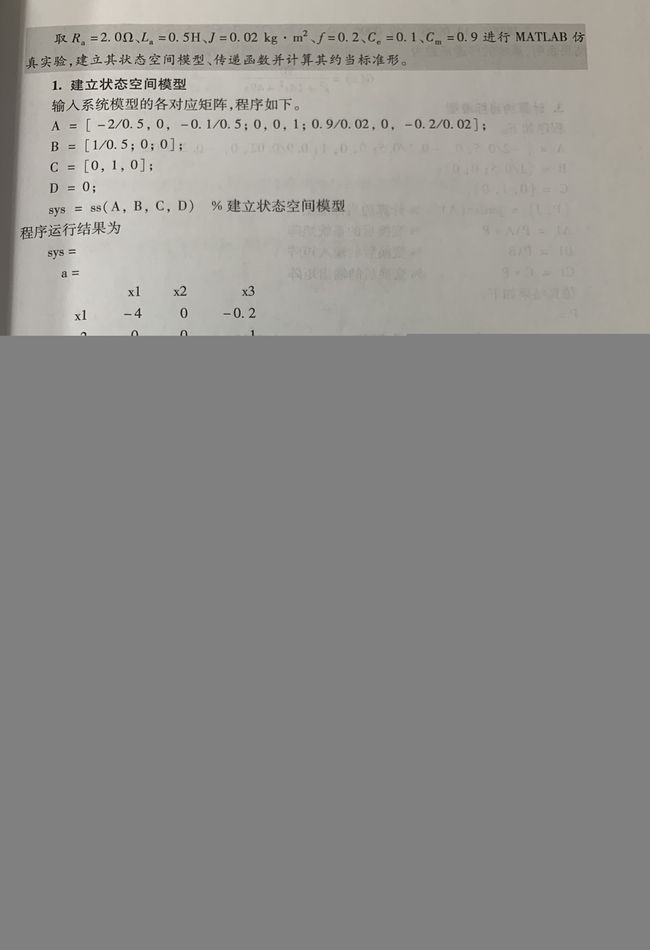
1.状态空间模型
已知线型定常连续系统Σ(A,B,C,D),可调用函数ss(·)建立其状态空间模型,调用格式为:
已知线型定常离散系统Σ(G,H,C,D),可调用函数ss(·)建立其状态空间模型,调用格式为:
2.传递函数模型
num=(bm,bm-1, … , b0)
den=(1,an-1, … , a0)
单输入单输出线型定常连续系统的调用格式为:
单输入单输出线型定常离散系统的调用格式为:
其中,输出sys为连续或离散系统的状态空间描述。
3.传递函数转换为状态空间模型
执行该命令后,输出为状态空间模型的系数矩阵A,B,C,D。
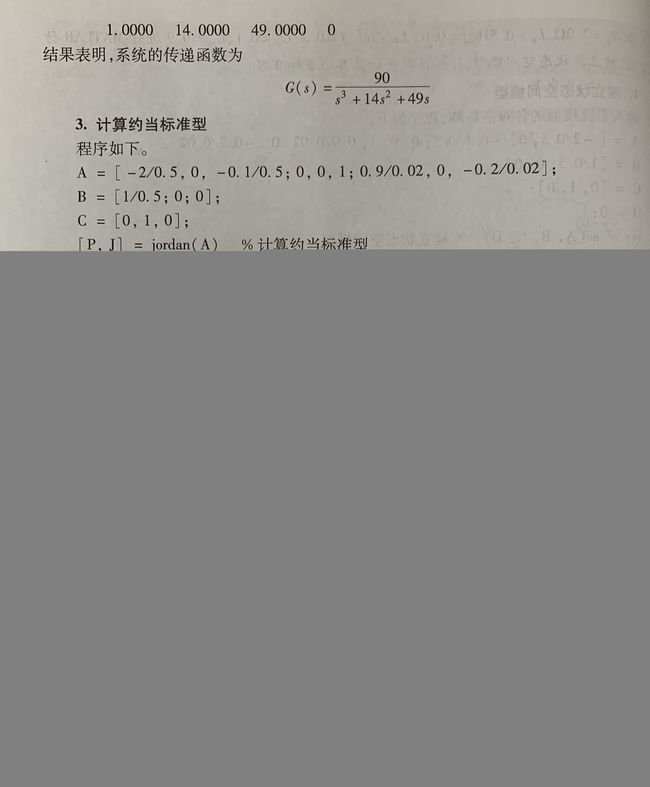
4.状态空间模型转换为传递函数
执行该命令后,输出为传递函数分子和分母多项式的系数数组num,den。
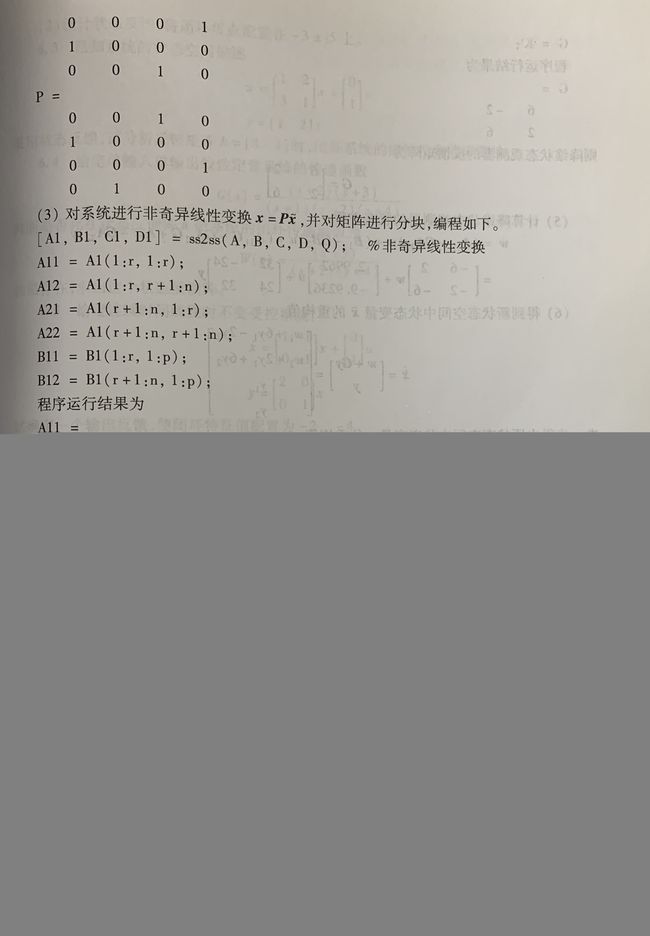
5.状态空间模型的线性变换
给定线性非奇异变换矩阵P:
其中,sys和sys1分别为线性变换前与变换后的状态空间模型。
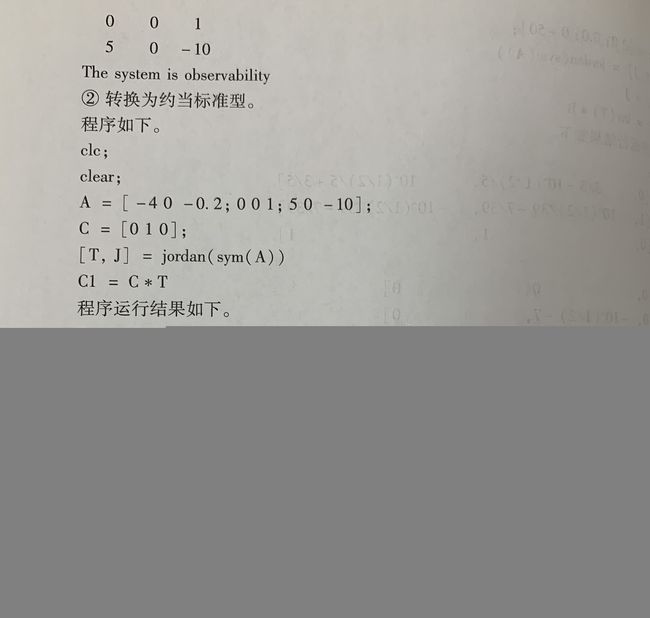
6.状态空间模型转化为约当标准型
其中,J是A的约当标准型,P是将A变换为J的线性变换矩阵。
7.实例
二、应用MATLAB进行线性系统的运动分析
1.矩阵指数函数的计算
对eAt进行数值计算时:
其中,eAt为计算结果。
对eAt进行符号计算时:
其中,t为符号变量,表达式A*t为MATLAB的符号矩阵。
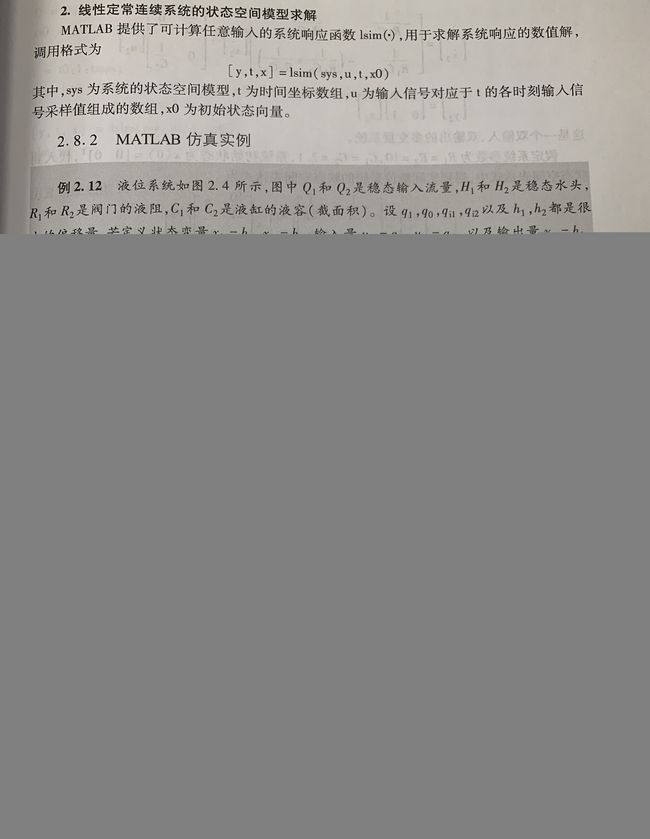
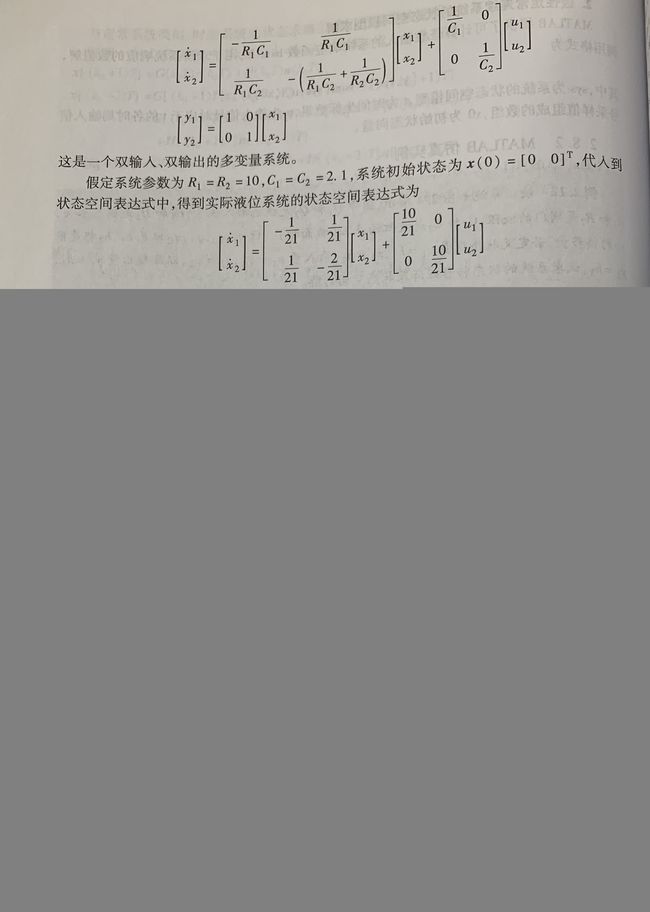
2.线型定常连续系统的状态空间模型求解
其中,sys为系统的状态空间模型,t为时间坐标数组,u为输入信号对应于t的各时刻输入信号采样值组成的数组,x为初始状态向量。
3.实例

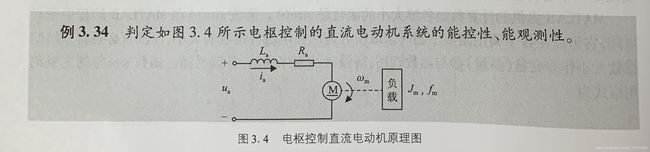
三、应用MATLAB分析线性系统能控性和能观性
1.状态能控性判定
其中,第一种输入格式为直接给定系统矩阵A和输入矩阵B,第二种格式为给定状态空间模型sys。输出矩阵Qc为计算所得的能控性判别矩阵。
其中,A为输入矩阵,shuchuk为A的秩。
其中,输出d为数组X的各维的大小组成的一维数组;m为数组X的第dim维的大小;d1,d2,d3,…,dn为数组X的各维的大小。
2.状态能观性的判定
其中,第一种输入格式为直接给定系统矩阵A和输入矩阵C,第二种格式为给定状态空间模型sys。输出矩阵Qo为计算所得的能观性判别矩阵。
3.能控标准型与能观标准型
MATLAB提供的建立系统标准型的函数cannon(·)只能用于建立对角线标准型和单输入单输出能控标准型。
4.按能控标准型分解和按能观标准型分解
MATLAB提供了.按能控标准型分解的函数ctrbf(·)和按能观标准型分解的函数obsvf(·)。
5.实例
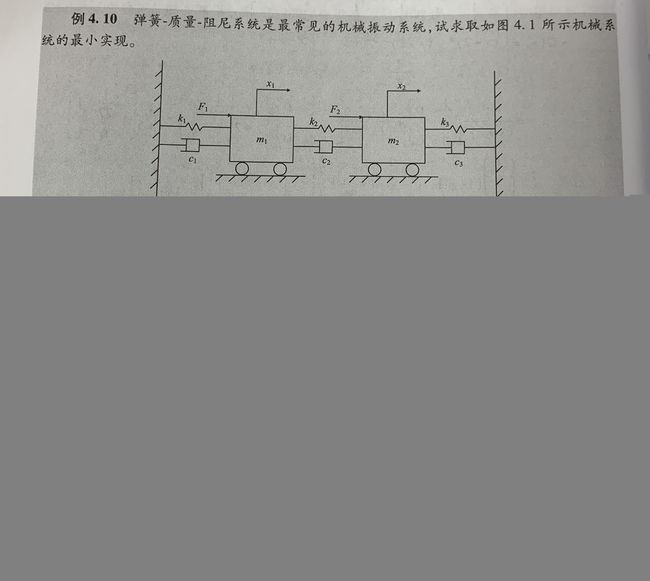
四、应用MATLAB研究线性系统的最小实现
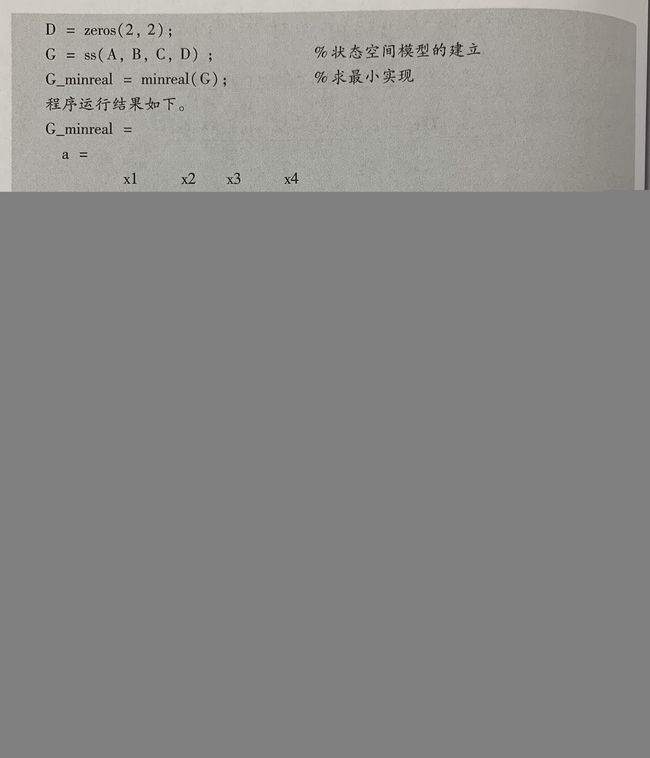
1.最小实现函数
其中,G_minreal为系统的最小实现,G为系统的状态空间模型。
2.实例


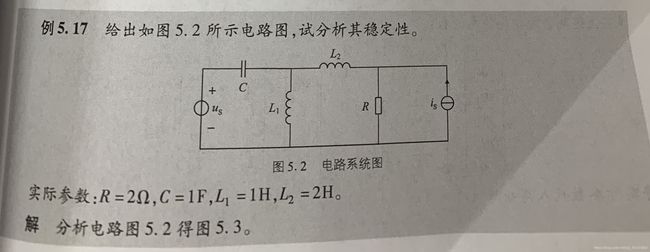
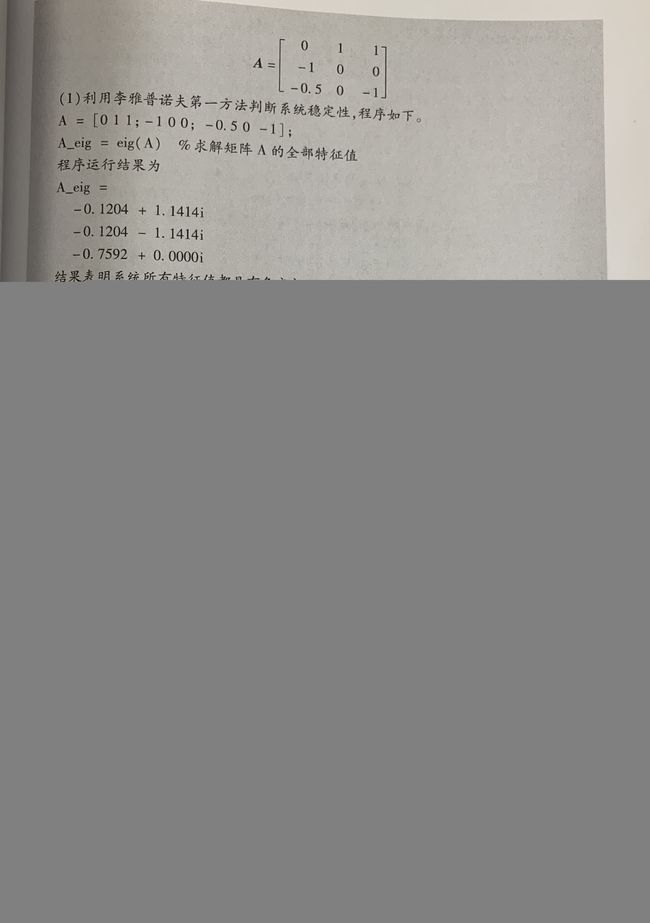
五、应用MATLAB分析线性系统稳定性
1.系统矩阵特征值的计算以及对称矩阵正定性的判定
其中A_eig为矩阵A的全部特征值构成的向量。
判别矩阵P的正定性也可利用上述函数,若特征值全部大于0,则P正定。
2.连续系统李雅普诺夫方程求解
求解连续系统李雅普诺夫方程ATP+PA=-Q中的对称矩阵P,调用格式为:
3.离散系统李雅普诺夫方程求解
求解离散系统李雅普诺夫方程GTPG-P=-Q中的对称矩阵P,调用格式为:
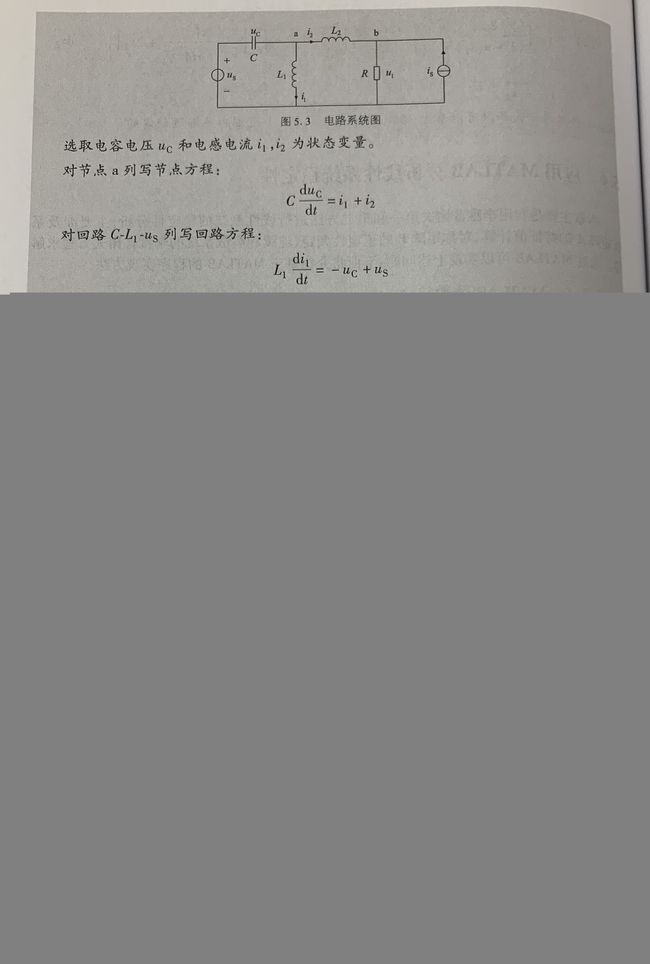
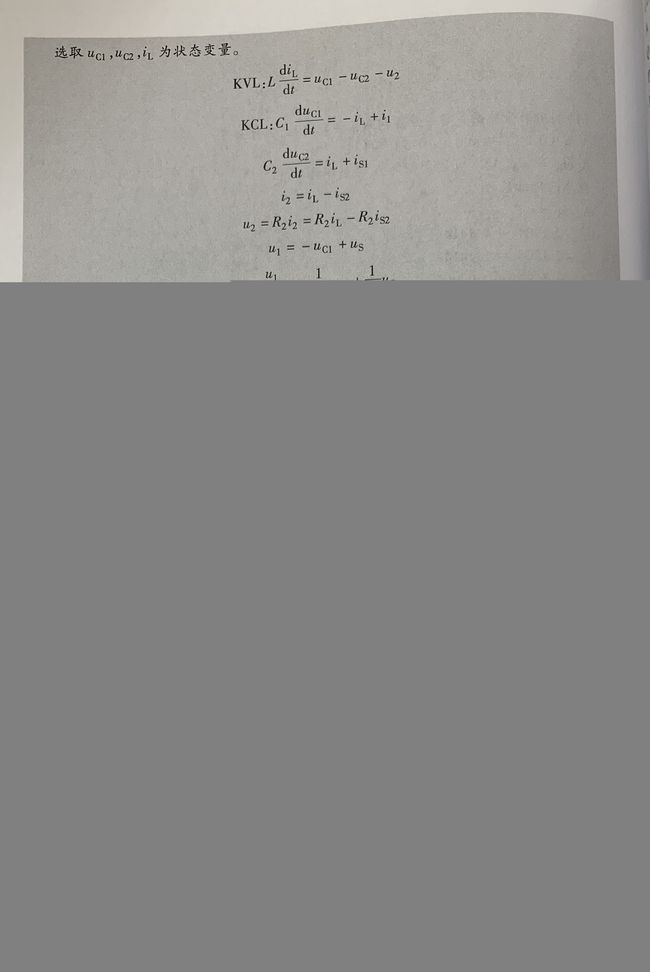
4.实例

六、应用MATLAB实现线性系统统合
1.单输入系统状态反馈极点配置
对于单输入线性定常系统Σ0(A,b):
其中,p为闭环系统期望极点构成的一维数组,输出K为状态反馈矩阵。
2.多输入系统状态反馈极点配置
对于多输入线性定常系统Σ0(A,B):
其中,p为闭环系统期望极点构成的一维数组,输出K为状态反馈矩阵。该函数既可用于单输入系统,也可适用于多输入系统。
3.实例