如何为你的硬件开发Simulink Toolbox(5)
 上次我们写了一个可以自动化配置模型选项的Block,双击它即可完成模型的配置,即配置了模型的基本信息,也配置了系统tlc、makefile模板、代码模板等和代码生成关系紧密的几个文件。
上次我们写了一个可以自动化配置模型选项的Block,双击它即可完成模型的配置,即配置了模型的基本信息,也配置了系统tlc、makefile模板、代码模板等和代码生成关系紧密的几个文件。
这次我们关注的是mytarget_proc.tlc这两个文件,它对应的是ERTCustomFileTemplate这个选项,可以用它来生成自定义的main函数,真正和我们的硬件发生联系。
翻箱倒柜从灰尘堆里的STM32开发板找出来,硬件我们就用他了,编译器用Keil,大家如果使用不同硬件和编译器也无所谓,根据自己的情况进行调整。
因为使用STM32我对mytarget_configuration函数进行了修改如下:
set_param(cs,‘ProdHWDeviceType’,‘ARM7’);
改成
set_param(cs,‘ProdHWDeviceType’,‘ARM Cortex’);
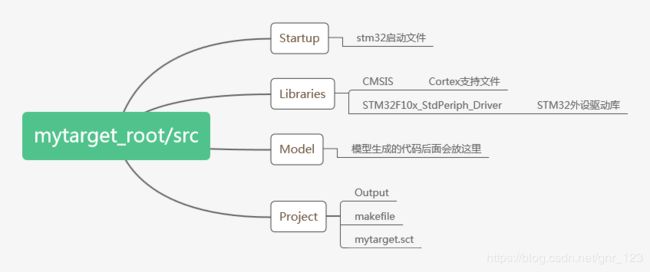
之前有讲过,在toolbox的根目录下,有一个src文件,用来放支撑模型运行的源代码。
mytargetroot/src
这个目录放喜闻乐见的C源码,例如启动、定时等运行框架代码,也包含硬件驱动的接口。
我准备的文件如下,熟悉STM32的朋友应该会看着比较眼熟,同时也会发现里面没有main.c。main.c我们会在代码生成的阶段把它生成出来,在开发阶段需要做的是编写一个生成的模板,这个生成的模板就是mytarget_proc.tlc。
mytarget_proc.tlc的内容看起来既熟悉又陌生,熟悉的是大段的C语言代码,陌生的是里面夹杂着少许TLC代码。它的主要功能是创建了一个新的源文件main.c,并通过LibGetMdlPubHdrBaseName、LibCallModelInitialize、LibCallModelStep、LibCallModelTerminate等几个TLC函数包含模型头文件,调用模型的initialize、step、terminate等函数。
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%
%% Abstract:
%% MyTarget file processing.
%%
%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%selectfile NULL_FILE
%assign ERTCustomFileTest = TLC_TRUE
%if EXISTS("ERTCustomFileTest") && ERTCustomFileTest == TLC_TRUE && !IsModelReferenceTarget()
%<LibSetCodeTemplateComplianceLevel(1)>
%if GenerateSampleERTMain
%assign CompliedModel.GenerateSampleERTMain = TLC_FALSE
%endif
%assign cFile = LibCreateSourceFile("Source", "Custom", "main")
%openfile typesBuf
/* Includes ------------------------------------------------------------------*/
#include "stm32f10x.h"
#include "rtwtypes.h"
#include "%.h"
%closefile typesBuf
%<LibSetSourceFileSection(cFile,"Includes",typesBuf)>
%openfile tmpBuf
volatile unsigned long systemTick;
void GPIO_Config(void);
#define Now() systemTick
struct timer
{
unsigned long period;
unsigned long timeout;
};
struct timer periodTimer;
struct led
{
GPIO_TypeDef *port;
unsigned short pin;
};
static struct led ledConfig[4] =
{
{GPIOB, (((unsigned short)1)<<8)},
{GPIOB, (((unsigned short)1)<<9)},
{GPIOE, (((unsigned short)1)<<0)},
{GPIOE, (((unsigned short)1)<<1)},
};
void LedContrl(unsigned char nr, unsigned char state)
{
if (state == 1)
{
GPIO_ResetBits(ledConfig[nr].port,ledConfig[nr].pin);
}
else
{
GPIO_SetBits(ledConfig[nr].port,ledConfig[nr].pin);
}
}
/**
* @brief Main program.
* @param None
* @retval : None
*/
int main(void)
{
systemTick = 0;
/* Setup STM32 system (clock, PLL and Flash configuration) */
SystemInit();
GPIO_Config();
/* Setup SysTick Timer for 1 msec interrupts */
if (SysTick_Config(72000000 / 1000)){
/* Capture error */
while (1);
}
/* Initialize model */
%<LibCallModelInitialize()>
periodTimer.period = 10;
periodTimer.timeout = Now() + periodTimer.period;
/* Infinite loop */
while (1) {
if (Now()>periodTimer.timeout)
{
periodTimer.timeout = Now() + periodTimer.period;
%<LibCallModelStep(0)>
}
}
%<LibCallModelTerminate()>
}
/**
* @brief GPIO_Config program.
* @param None
* @retval : None
*/
void GPIO_Config(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOC |
RCC_APB2Periph_GPIOD | RCC_APB2Periph_GPIOE | RCC_APB2Periph_AFIO, ENABLE);
/**
* LED1 -> PB8 , LED2 -> PB9 , LED3 -> PE0 , LED4 -> PE1
*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8 |GPIO_Pin_9;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 |GPIO_Pin_1;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(GPIOE, &GPIO_InitStructure);
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval : None
*/
void assert_failed(uint8_t* file, uint32_t line)
{
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* Infinite loop */
while (1)
{
}
}
#endif
/**
* @}
*/
%closefile tmpBuf
%<LibSetSourceFileSection(cFile,"Functions",tmpBuf)>
%endif
在模型生成后,mytargetroot/src目录下应当是一个完整的可编译的STM32工程,这个工程不是指Keil工程,为了实现在代码生成后的自动化编译,我们编写makefile文件,让matlab来启动编译。
MAKE = C:\TDM-GCC-64\bin\make
KEIL_PATH = C:\Keil\ARM
ARMCC = $(KEIL_PATH)\BIN40\armcc
ARMASM = $(KEIL_PATH)\BIN40\armasm
ARMAR = $(KEIL_PATH)\BIN40\armar
ARMLINK = $(KEIL_PATH)\BIN40\armlink
FROMELF = $(KEIL_PATH)\BIN40\fromelf
CFLAGS := -c --cpu Cortex-M3 -D__MICROLIB -g -O0 --apcs=interwork
CMACRO := -DSTM32F10X_HD -DUSE_STDPERIPH_DRIVER
ASMFLAGS := --cpu Cortex-M3 -g --apcs=interwork --pd "__MICROLIB SETA 1"
LINKFLAGS := --cpu Cortex-M3 --library_type=microlib --strict
MAP := --autoat --summary_stderr --info summarysizes --map --xref --callgraph --symbols
INFO := --info sizes --info totals --info unused --info veneers
TARGET = .\Output\mytarget
OBJMAP := .\Output\*.map
OBJHTM := .\Output\*.htm
OBJAXF := .\Output\*.axf
SRCS = ..\User\src\main.c
OBJS = ..\Model\main.o\
..\Startup\startup_stm32f10x_hd.o\
..\Libraries\CMSIS\core_cm3.o\
..\Libraries\CMSIS\system_stm32f10x.o\
..\Libraries\CMSIS\stm32f10x_it.o
INC += -I$(KEIL_PATH)\RV31\INC
INC += -I$(KEIL_PATH)\CMSIS\Include
INC += -I$(KEIL_PATH)\INC\ST\STM32F10x
INC += -I..\Libraries\CMSIS
INC += -I..\Libraries\STM32F10x_StdPeriph_Driver\inc
%.o:%.c
$(ARMCC) $(CFLAGS) $(INC) $(CMACRO) $< -o $@
%.o:%.s
$(ARMASM) $(ASMFLAGS) $(INC) $< -o $@
mytarget:$(OBJS)
$(ARMLINK) $(LINKFLAGS) --libpath "$(KEIL_PATH)\RV31\LIB" --scatter=mytarget.sct $(MAP) $(INFO) --list $(TARGET).map $^ ..\Libraries\STM32F10xR_V3.0.lib --output=$(TARGET).axf
$(FROMELF) --bin -o $(TARGET).bin $(TARGET).axf
$(FROMELF) --i32 -o $(TARGET).hex $(TARGET).axf
del $(OBJHTM) $(OBJAXF) $(OBJS)
.PHONY : clean
clean:
del $(OBJS) *.map *.htm
回想上次的ConfigureMyTarget模块,我们并没有为它编写TLC文件,这会导致在模型代码生成过程中需要支持noninlined S-Functions,依赖non-finite numbers和floating-point numbers,从而生成例如rtGetIf.c等多个C文件,为了避免生成我们不想要的文件,给ConfigureMyTarget模块编写如下TLC。
%implements "ConfigureMyTarget" "C"
%function BlockTypeSetup(block, system) Output
%endfunction
%function Start(block, system) Output
%endfunction
%function Outputs(block, system) Output
%endfunction
下面我们来验证一下,建立一个模型,模型名字叫demo,里面什么都没有,只是放了一个配置模型的模块。
 双击配置模型,然后Build,模型代码和main.c文件按照预期生成。
双击配置模型,然后Build,模型代码和main.c文件按照预期生成。
 ok,这次就到这里,下次我们来看如何自动化的编译生成的文件。
ok,这次就到这里,下次我们来看如何自动化的编译生成的文件。
