第三十五周学习笔记
文章目录
- 第三十五周学习笔记
- SuperPoint复现进度
- detector可视化
- Encoder架构
- Detector Head架构
- detector 的 Ground Truth 和 Label的关系
- 样本不均衡问题
- 网络debug
- 使用单张图片放入网络训练
- Pytorch MNIST分类
- pipline
- 结果分析
- 全连接
- momentum=0
- momentum=0.9
- momentum VS no momentum
- CNN
- 问题
- 对MNIST做或不做除以255有什么影响
- 使用或不使用momentum有什么影响
- SGD with momentum的公式是啥
- net在什么时候初始化参数?net.train还是什么?
- tensor.data和tensor.item有啥区别
- 输入图片的tensor是uint8还是float有啥区别
- 论文阅读 《Deep Residual Learning for Image Recognition》
- 概括
- 文章解决了什么问题
- 用了什么方法
- 主要思想
- 细节
- 不同层的ResNet
- ResNet-50
- ResNet101和ResNet152
- 效果如何
- plain Net和ResNet的对比
- shortcuts connection和不同层数的ResNet的对比(ImageNet)
- CIFAR-10
- 结论
- 存在什么不足
- 其他
- 术语
- 训练的细节
- Image Net
- CIFAR-10
- 问题
- 本周小结
- 下周计划
第三十五周学习笔记
SuperPoint复现进度
code
detector可视化
Encoder架构
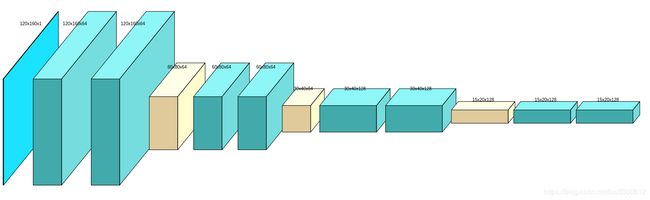
为了显示全图,省略了relu操作,relu就是stride为2,kernel_size为2的常规非线性操作,在每层卷积层后都有
Detector Head架构

输出是一个(15,20,65)的tensor,除去最后一维“no interest dustbin”之后,剩余的(15,20,64)的结果可以reshape成原图的大小(120,160)
Detector Head对Encoder得到的feature进行decode,通过增加深度,最后将深度重新reshape到长宽维上实现与原图一样大小的输出,这里之所以不使用upconvolution的原因是add a high amount of computation and can introduce unwanted checkerboard artifacts[18]
detector 的 Ground Truth 和 Label的关系
观察损失函数
L p ( X , Y ) = 1 H c W c ∑ h = 1 , w = 1 H c , W c l p ( x h w ; y h w ) L_p(X,Y)=\dfrac{1}{H_cW_c}\sum_{h=1,w=1}^{H_c,W_c}l_p(\mathbf{x}_{hw};y_{hw}) Lp(X,Y)=HcWc1h=1,w=1∑Hc,Wclp(xhw;yhw)
其中, H c = H / 8 , W c = W / 8 H_c=H/8,W_c=W/8 Hc=H/8,Wc=W/8,且
l p ( x h w ; y ) = − log exp ( x h w y ) ∑ k = 1 65 exp ( x h w k ) l_p(\mathbf{x}_{hw};y)=-\log\dfrac{\exp(\mathbf{x}_{hwy})}{\sum_{k=1}^{65}\exp(\mathbf{x}_{hwk})} lp(xhw;y)=−log∑k=165exp(xhwk)exp(xhwy)
注意到detector的输出是(15,20,65)的,除去最后一个深度维后,剩下(15,20,64)对应着原图(120,160)的15*24个8*8的区域,对每个这样的区域,关键点所在的第几个位置(将8/*8的区域拉成64维向量)即是 y h w y_{hw} yhw的值,若区域中没有关键点,则 y h w = 65 y_{hw}=65 yhw=65,显然,从上面的损失函数中,默认了每个8*8区域中只有一个关键点,如果某个区域中有多于1个的关键点,则会在其中随机选择一个,虽然网络训练时使用随机的关键点,但是,实际的时候,大于最低置信度的点都会被认为是关键点,在训练过程中,只要多个关键点都多次被选中,可能可以检测出所有关键点。
样本不均衡问题
实际的标签上大多数是64(代表没有兴趣点),并没有特别的解决样本不均衡问题的方法,作者在pretrained model中设置了检测最低置信度为0.015(约为1/65),而tf实现中,检测的最低置信度更是0.001
网络debug
由于实际训练时,用上述的置信度,得出的网络输出的兴趣点都分布在如图的边缘,所以可能需要debug网络

使用单张图片放入网络训练
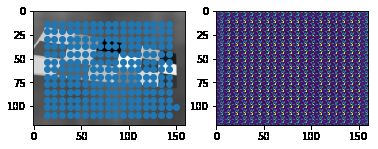
1.训练出的网络对输入不敏感,且输出的热力图的8*8网格中每个小格子输出一样

几乎差不多的热力图,网络的输出损失也很大,预测结果和全部热力图如下图,这是欠拟合的表现
2.增大训练轮次后输出scale不同
损失小于1e-5,但预测时出现指数溢出,查看输出,发现15*20的每个65维输出的scale不一样,有的是0~80,有的是-40~0,统计结果如下
位于output[1,:,:]的统计结果
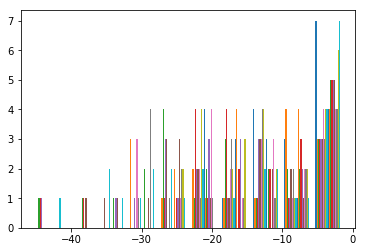
位于output[59,:,:]的统计结果
所以求exp的时候会溢出,loss的数值也不稳定,此时对每个15*20的channel求argmax时,得到的结果已经和label完全一致,可能是因为过拟合太多的原因,且在训练过程中,loss瞬间从0.5下降到0.002,可能是momentum在同一张图片上训练更新向量累积模太大,所以去掉momentum,且为防止过拟合,设定最小loss阈值
注意因为此处的输出求argmax后已经与label完全一样,我曾想通过归一化来保证预测时exp的数值稳定,但实际上是不可行的,因为不能做统一的归一化,这样会导致scale相对小的激活值输出的置信度很低,也不能做15*20区域中每个64维向量分别的归一化(?但是softmax的时候实际上是这样做的),这样会导致每个区域都有较大的激活值,问题是softmax在求损失函数的时候为什么数值是稳定的呢?
- 可能是因为输入没处理好的原因
- 可能是标签没处理好的原因
- 可能是输出转化到标签没处理好的原因
- 可能是loss函数不对的原因,计算了下损失的上界,-log(1/65) = 4.1744,与每次训练开始的误差是一致的
- 框之间的大小不可比???尽管是框中最大的激活值,还没有别的框中的非关键点激活值大?
3.在验证集上训练误差停在0.2左右下不去,且预测结果很差
考虑之后使用可变的学习率来改正
Pytorch MNIST分类
代码在这
本实验主要是使用Pytorch进行MNIST分类,并与pytorch-example的代码进行对比
pipline
- 下载并载入数据,本次只使用训练集1000,测试集200
- 浏览数据集
- 定义网络,全连接和卷积两种
- 全连接网络:28*28->28*28->10,参数共计28*28*28*28+28*28*10=622496个
- CNN:卷积核3*3,padding=1,stride=1,conv(1,8)->relu->pool->conv(8,16)->relu->fc,参数共计(3*3)*8+(3*3*8)*16+7*7*16*10=9064个
- 写出预测的代码,并用初始化的网络预测几个结果
- 调参,使用不同的学习率和momentum
- 训练
- 测试
结果分析
全连接
momentum=0

可见学习率对训练的影响,太小则太慢,太大则无法收敛
momentum=0.9


在有动量的情况下,加快了小学习率的优化速度,稍大的学习率在无动量情况下表现良好,但此时也会出现震荡
momentum VS no momentum

没有动量的方法稍微好一点,两者表现相差不大,但有动量因为额外的计算需要更长的时间
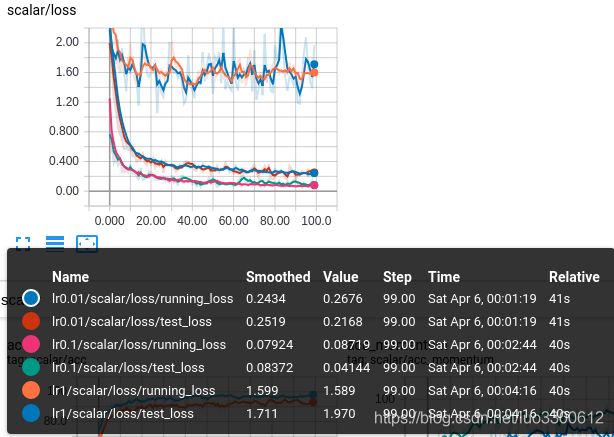
CNN


所有的参数中,表现好的参数有
- lr=0.1,train_loss=0.0533,test_loss=0.1158
- lr=0.01,train_loss=0.0978,test_loss=0.0816
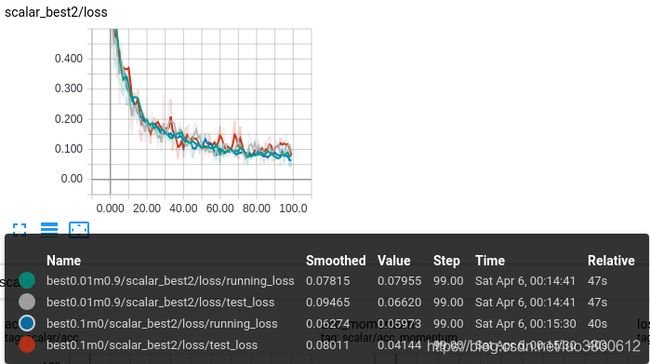
- lr=0.01,momentum=0.9,train_loss=0.06866,test_loss=0.06981
与之前的结果相似,小的学习率配上动量可以得到较好的结果,在这里大的学习率收敛快,因为没有正则化而出现了过拟合,本例使用的两个模型,在准确率上,CNN和全连接相差不大,但全连接的参数是CNN的68倍多
问题
对MNIST做或不做除以255有什么影响
原数据就是0~1之间的浮点数,不需要再除以255
使用或不使用momentum有什么影响
小学习率和momentum是好的组合
SGD with momentum的公式是啥
原来的公式是
x += learning_rate * gradient
加上momentum公式是
v = momentum * v - learning_rate * gradient
x += v
net在什么时候初始化参数?net.train还是什么?
网络在init方法后会自动初始化参数,net.train与net.eval是对特殊层(如bn、dropout)在训练和测试时切换表现的选项
tensor.data和tensor.item有啥区别
tensor.data虽然可以使用,但是文档中查不到,且返回还是一个tensor,而tensor.item()则返回python类型的数值,要求tensor是一个一维张量
输入图片的tensor是uint8还是float有啥区别
不知道
论文阅读 《Deep Residual Learning for Image Recognition》
概括
文章提出了深度残差学习网络,解决了深层网络难以优化的问题,核心思想是以学习残差代替学习直接映射,理论上这降低了网络学习到恒等映射的难度,从而使得更深的网络起码和浅的网络效果一样好
文章解决了什么问题
- 更深的神经网络更难训练,容易出现梯度爆炸和消失的问题,但初始化的正规化和中间层的正规化很大程度的降低了这一可能(不是本文主要解决的问题)
- 更深的网络的准确率达到饱和,进而不断下降,增加更多层反而引起更多的误差
- 这意味着这个系统难以优化(本文主要解决的就是更深的网络的优化问题)
用了什么方法
主要思想
理论上来说,更深的网络至少可以表现地和浅层的网络一样好,只要在一个浅层的网络加后加多层恒等变换层
提出了残差学习网络来降低深层神经网络的学习难度,网络不直接学习输入到输出的映射 H ( x ) H(x) H(x)而学习输出和输入之差 F ( x ) = H ( x ) − x F(x)=H(x)-x F(x)=H(x)−x,然后通过 F ( x ) + x F(x)+x F(x)+x重建原映射,作者认为,如果恒等映射是最优的,这样的网络学习恒等变换比原来要简单(只要层的所有参数为0即可)
细节

x的传播可以很容易地使用shortcut connections实现
图中给出了ResNet的building block,定义为
y = F ( x , { W i } ) + x y=F(x,\{W_i\})+x y=F(x,{Wi})+x
其中 x x x, y y y分别为输入和输出, F F F表示待学习的残差映射,比如在上图中,就有 F = W 2 σ ( W 1 x ) F=W_2\sigma(W_1x) F=W2σ(W1x),其中 σ \sigma σ是ReLU函数,且为了简洁省略了偏置项,且第二个非线性层在 F ( x ) + x F(x)+x F(x)+x之后使用
注意到这个shortcut connection没有引入新的参数和多的计算复杂度
注意到 F F F和 x x x的维度必须相同,如果不相同,可以通过一个投影变换实现
y = F ( x , { W i } ) + W s x y=F(x,\{W_i\})+W_sx y=F(x,{Wi})+Wsx
作者也提出可以在维度match的时候在 x x x前加一个方阵 W s W_s Ws,但实验中表明恒等映射已经足够, W s W_s Ws仅仅在维度不匹配时使用
每个building block中的层数大于等于两层(图例中是两层),作者观察到使用1层并不能带来什么好处,可能由于1层本身就是一个线性变换 y = W 1 x + x y=W_1x+x y=W1x+x
网络结构
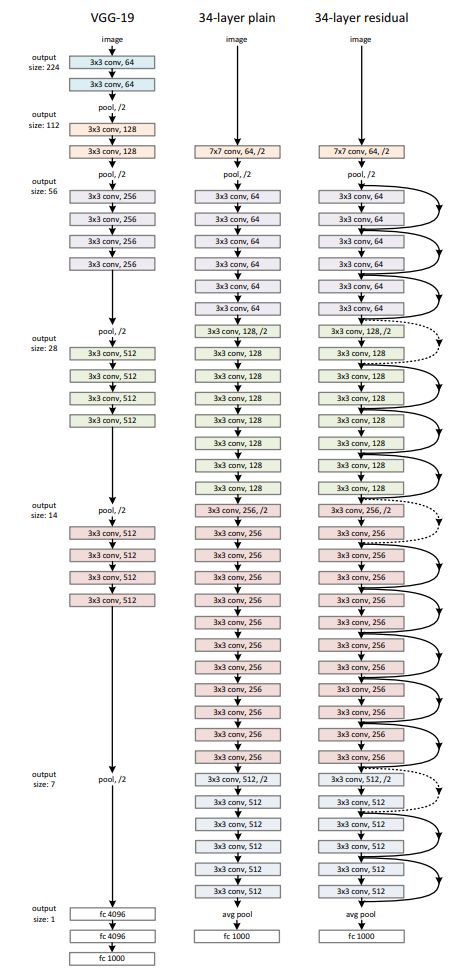
作者使用一个plain网络和一个ResNet来做对比,其中
- plain Network
- 所有卷积之后输出的大小不变
- 如果特征图长宽小一半,则卷积核的数量加倍(channel加倍)以保证每层计算复杂度一样
- Residual Network
- 在plain Network的基础上加shortcut connections
- 维度相同时,之间使用identity shortcuts
- 如果维度增加了(channel),有两个选择:
- (A) 0 padding
- (B) 使用投影变换
注意其中的下采样均是由stride为2的卷积网络实现的,而非池化层
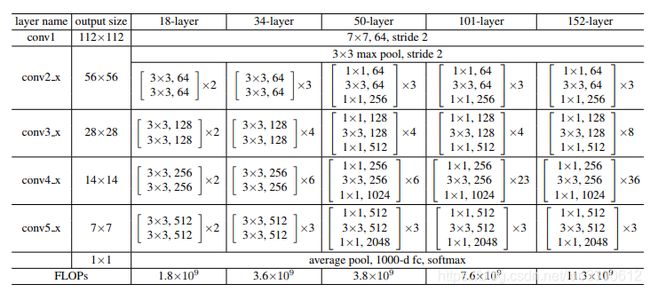
不同层的ResNet
层数不同的ResNet的区别如下
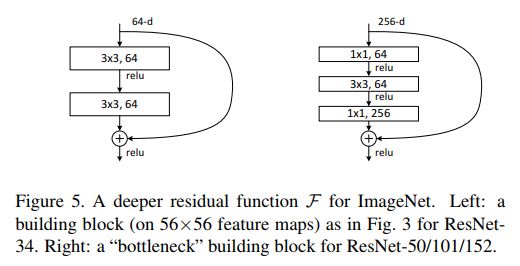
bottleneck是权衡之后的building block,更深的网络可以得到更好的结果,但是相比训练时间来说是不值得的
ResNet-50
用3层的block代替ResNet34中的2层block
ResNet101和ResNet152
使用更多的3层block得到
效果如何
plain Net和ResNet的对比

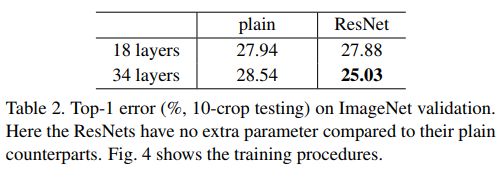
浅层的网络精度相差不多,但ResNet18收敛更快,随着层数增加,plain Net的误差反而上升,而ResNet的误差大大下降
shortcuts connection和不同层数的ResNet的对比(ImageNet)
三种shortcuts
- (A)0 padding
- (B)只在维度改变时使用投影
- ©所有shortcuts都使用投影
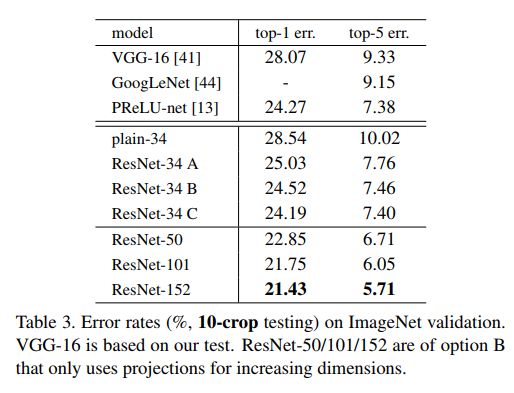
结果表明三种方法的结果相差不多,C比AB好一点,但C引入了太多的参数,且ResNet50/101/152比ResNet34有更高的准确率
CIFAR-10
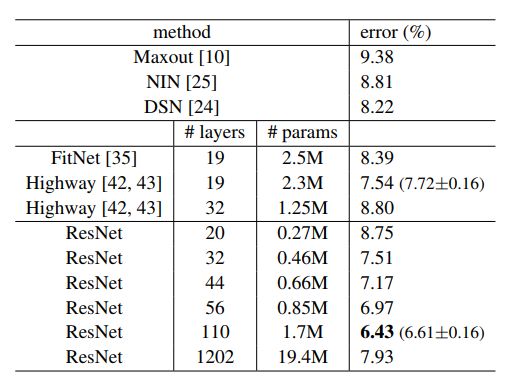
注意到ResNet1202虽然误差也很好,但是没有ResNet110好,可能是因为过拟合的原因
结论
- ResNet更容易优化
- 更容易使得网络更深以获得更高的准确率
- 以3.57%的top-5错误率赢得了2015年ILSVRC的冠军,获得了ImageNet detection,ImageNet localization,COCO detection 和COCO segmentation的冠军
存在什么不足
?
其他
术语
- FLOPS 每秒浮点运算次数
训练的细节
Image Net
- 图片随机将小的那一维resize成[256,480]中的值,然后crop成224*224
- 使用了standard color augmentation
- 在卷积之后激活之前使用batch normalization
- 使用SGD,初始学习率为0.1,当误差停滞的时候,将学习率除以10
- weight decay 0.0001,动量0.9
- 不使用dropout
CIFAR-10
- mini batch 128
- 初始学习率0.1,在32k和48k次迭代时除以10
- 在64k次迭代时终止
问题
具体地,A、B是怎么实现的?
本周小结
- 终于完成了拖欠三周的resnet论文的阅读
- 训练出初始的superpoint模型,卡在bug上未完成
- 学习opencv到百分之50,快到25%了
下周计划
- 阅读faster-cnn的论文
- 训练出MagicPoint
- 学习opencv上册到50%