FM33LC02X FreeRTOS MDK 移植记录总结
文章目录
- Demo下载
- 1.获取FreeRTOS源码
- 2.代码移植
- 3.工程配置
- 4.修错改错
- 5.中断链接
- 6.运行代码
- 7.使用案例
Demo下载
1.获取FreeRTOS源码
点击获取FreeRTOS源码
源码下载后可直接解压:如下系列图所示结构。


2.代码移植
总的来说,我们移植所需要的紧紧是FreeRTOS/Source 下的相关文件,可参考的是FreeRTOS/Demo下的相关例程。
这里我们直接在我们需要跑系统的源码例程根目录新建一个FreeRTOS的目录用来存放移植相关的文件,如图:
我们直接将上面提到的FreeRTOS/Source目录拷贝过来,也不进行具体文件的分析,后续在keil工程中直接导入需要的相关文件即可,若要明白相关移植文件的具体作用可参考章末的两篇参考链接,写的都挺详细。

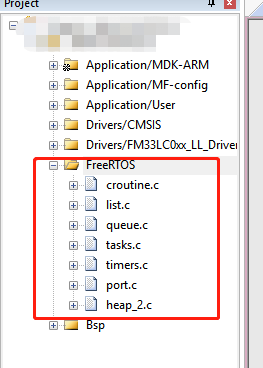
3.工程配置
这里可以看到移植后的工程目录结果如下所示:
将FreeRTOS相关头文件目录包含进工程:
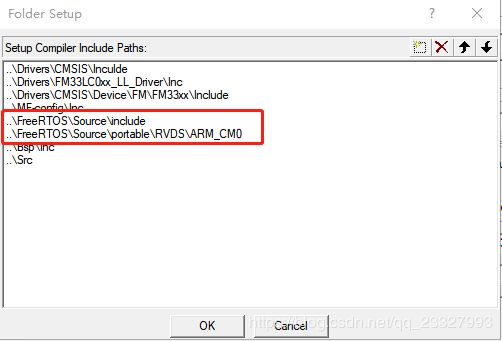
到这里,编译应该会报错FreeRTOSConfig.h 找不到,这个文件可以在刚刚看到的Demo文件下的任意一个例程里去拷一个,拷贝过来可能要做对应的修改,该头文件对裁剪整个FreeRTOS所需的功能的宏均做了定义,有些宏定义被使能,有些宏定义被失能,一开始我们只需要配置最简单的功能即可。
这里简单介绍下(小插曲):
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
#include "stm32f10x.h"
#include "bsp_usart.h"
//针对不同的编译器调用不同的stdint.h文件
#if defined(__ICCARM__) || defined(__CC_ARM) || defined(__GNUC__)
#include 至此,编译应该可能正常通过了。
4.修错改错
若到这步,还有相关错误,可自行查看日志进行修错改错,一般都是文件找不到,什么没有定义之类的。可按图索骥进行去错。
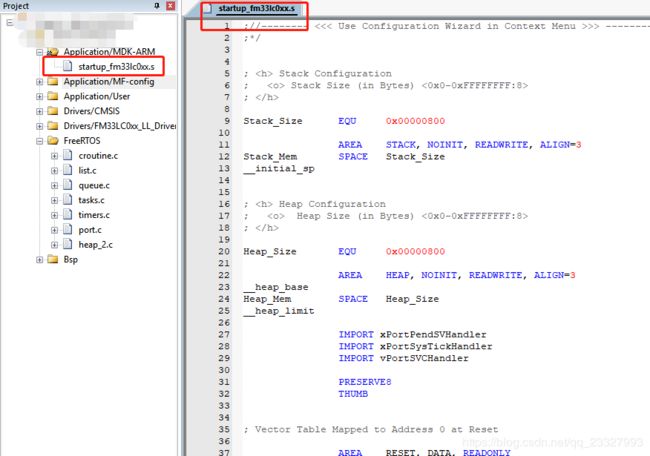
5.中断链接
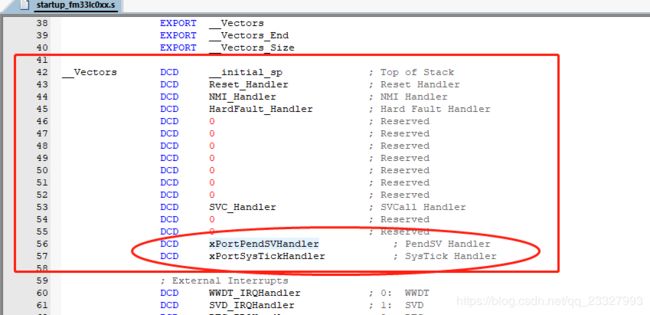
到这里,编译确认无错,能够完成编译,运行代码可能看到会不生效的现象,这里还有一步需要完成,因为使用了FreeRTOS,那么就需要将裸机的中断挂接到OS中来。具体修改在芯片的启动文件中,汇编语言编写,如图:
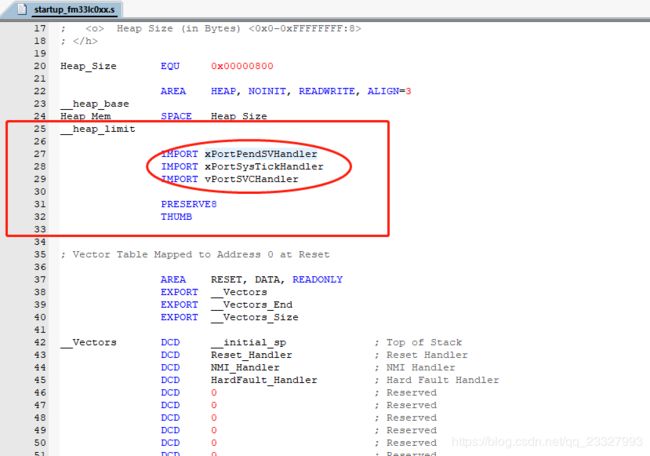
该文件具体修改如下:
//新增
IMPORT xPortPendSVHandler
IMPORT xPortSysTickHandler
IMPORT vPortSVCHandler
//修改
DCD PendSV_Handler ; PendSV Handler
DCD SysTick_Handler ; SysTick Handler
//至
DCD xPortPendSVHandler ; PendSV Handler
DCD xPortSysTickHandler ; SysTick Handler
6.运行代码
至此,代码应该可以顺利运行了,并且是运行于FreeRTOS系统之上。若至此还有相关错误,切记看错误日志和善利搜索引擎。
7.使用案例
#include "featureCtlVaule.h"
ErrorStatus IWDT_Init(void)
{
LL_IWDT_InitTypeDef IWDT_InitStruct;
/* 默认不使用窗口 */
IWDT_InitStruct.IwdtWindows = 0;
/*最长溢出时间*/
IWDT_InitStruct.OverflowPeriod = LL_IWDT_IWDT_OVERFLOW_PERIOD_8000MS;
return LL_IWDT_Init(IWDT, &IWDT_InitStruct);
}
void IWDT_Clr(void)
{
LL_IWDG_ReloadCounter(IWDT);
}
#if 0
int main(void)
{
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
/* SHOULD BE KEPT!!! */
MF_Clock_Init();
/* Configure the system clock */
/* SHOULD BE KEPT!!! */
MF_SystemClock_Config();
/* Initialize all configured peripherals */
/* SHOULD BE KEPT!!! */
MF_Config_Init();
IWDT_Init();//看门狗
UserInit();
// SystemInit();
while(1)
{
IWDT_Clr(); //清系统看门狗
LED0_TOG();
LED1_TOG();
DelayMs(500);
}
}
#else
#define START_TASK_PRIO 1
#define START_STK_SIZE 128
TaskHandle_t StartTask_Handler;
void start_task(void *pvParameters);
#define LED0_TASK_PRIO 2
#define LED0_STK_SIZE 50
TaskHandle_t LED0Task_Handler;
void led0_task(void *pvParameters);
#define LED1_TASK_PRIO 3
#define LED1_STK_SIZE 50
TaskHandle_t LED1Task_Handler;
void led1_task(void *pvParameters);
int main(void)
{
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
/* SHOULD BE KEPT!!! */
MF_Clock_Init();
/* Configure the system clock */
/* SHOULD BE KEPT!!! */
MF_SystemClock_Config();
/* Initialize all configured peripherals */
/* SHOULD BE KEPT!!! */
MF_Config_Init();
IWDT_Init();//看门狗
UserInit();
Uartx_Init(UART0);
KEY_GPIO_Init();
// SystemInit();
printf("FreeRTOS CDBLE!");
xTaskCreate((TaskFunction_t )start_task,
(const char* )"start_task",
(uint16_t )START_STK_SIZE,
(void* )NULL,
(UBaseType_t )START_TASK_PRIO,
(TaskHandle_t* )&StartTask_Handler);
vTaskStartScheduler();
}
void start_task(void *pvParameters)
{
taskENTER_CRITICAL();
xTaskCreate((TaskFunction_t )led0_task,
(const char* )"led0_task",
(uint16_t )LED0_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED0_TASK_PRIO,
(TaskHandle_t* )&LED0Task_Handler);
xTaskCreate((TaskFunction_t )led1_task,
(const char* )"led1_task",
(uint16_t )LED1_STK_SIZE,
(void* )NULL,
(UBaseType_t )LED1_TASK_PRIO,
(TaskHandle_t* )&LED1Task_Handler);
vTaskDelete(StartTask_Handler);
taskEXIT_CRITICAL();
}
void led0_task(void *pvParameters)
{
while(1)
{
printf(" Task 0 \r\n");
LED0_TOG();
vTaskDelay(500);
IWDT_Clr();
}
}
void led1_task(void *pvParameters)
{
while(1)
{
LED1_TOG();
printf(" Task 1_1 \r\n");
vTaskDelay(200);
printf(" Task 1_2 \r\n");
vTaskDelay(800);
IWDT_Clr();
}
}
#endif
参考:
第一节:FreeRTOS (MDK)系统移植 (详细)
超详细的FreeRTOS移植全教程——基于srm32