一步一步教你构建一个MPU6050(I2C类)驱动(一)
1 i2c基本协议和时序
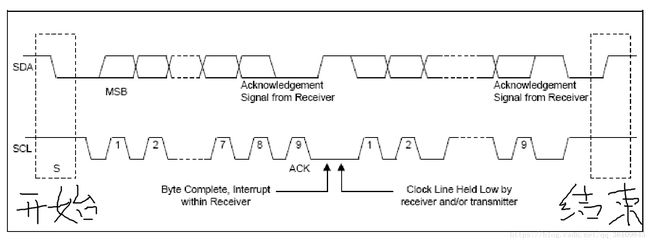
i2c基础的知识这里就不提了,直接从时序开始,直接来看看i2c的波形

2 i2c子系统软件框架
先来看看i2c总线的分层思想:
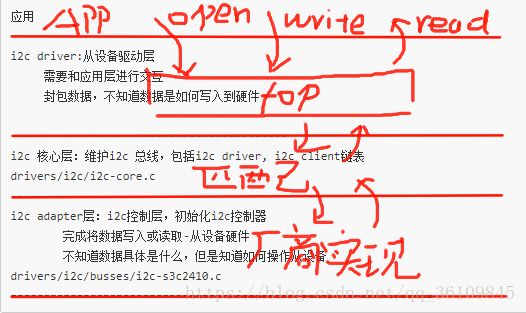
在分层图中我们可以看到,driver和device在核心层中分别成为了2条链表,核心层会按一定的规则匹配两条链表中的元素。
查看内核源码 i2c-core.c ,找到了匹配的函数如下:
static int i2c_device_match(struct device *dev, struct device_driver *drv)
{
struct i2c_client *client = i2c_verify_client(dev);
struct i2c_driver *driver;
if (!client)
return 0;
/* Attempt an OF style match */
if (of_driver_match_device(dev, drv))
return 1;
/* Then ACPI style match */
if (acpi_driver_match_device(dev, drv))
return 1;
driver = to_i2c_driver(drv);
/* match on an id table if there is one */
if (driver->id_table)
return i2c_match_id(driver->id_table, client) != NULL;
return 0;
}在这个函数中我们很清楚的看到I2c有三种匹配规则。第一种是按设备树匹配,第二种是按ACPT匹配,第三种则是按id_table匹配(实际上id_table匹配就是匹配dev和drv的名字)。
3 I2c子系统中涉及到的设备树文件
这次我们按设备树来匹配,首先进入内核的设备树源码,添加我们的硬件
linux@ubuntu:~/Myfile/linux-3.14-fs4412$ vi arch/arm/boot/dts/exynos4412-fs4412.dts

图中的i2c@138B0000部分就是我们这次要手动添加的。可以通过:/i2c来搜索别的i2c设备写在哪个位置,在它的附近添加我们的代码。图中代码在 pinctrl-0 = <&i2c5_bus>; 这句中写错了,应该是挂载在5号i2c总线上。
这次我们添加的代码如下:
i2c@138B0000{
#address-cells = <1>;
#size-cells = <0>;
samsung,i2c-sda-delay = <100>;
samsung,i2c-max-bus-freq = <20000>;
pinctrl-0 = <&i2c5_bus>;
pinctrl-names = "default";
status = "okay";
//板子电路原理图上,6050的挂载总线是低电平,因此是0x68,若是高电平就是0x69
mpu6050@68 {
compatible = "InvenSense,mpu6050";
reg = <0x68>;
};
};添加完后输入 make dtbs 命令生成新的设备树文件,然后烧写到我们板子上。
这样,i2c类驱动的前期准备工作就做好了。