机械手的滑模控制matlab实验
如果可以的话,欢迎关注和点赞哦~
假设机械臂实际物理参数如下

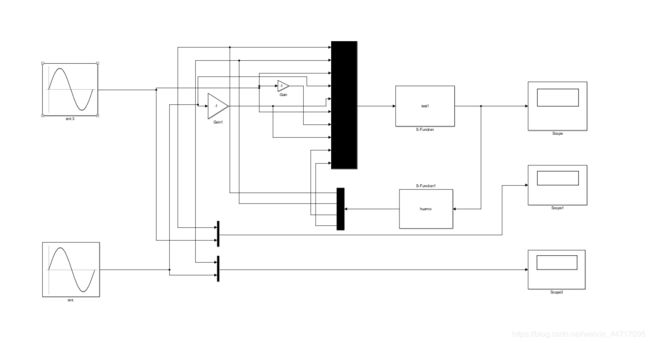
function [sys,x0,str,ts,simStateCompliance] = test1(t,x,u,flag)
switch flag
case 0 [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1
sys=mdlDerivatives(t,x,u);
case 3
sys=mdlOutputs(t,x,u);
case {2,4,9}
sys=[];
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag',num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes = simsizes; sizes.NumContStates = 0;
sizes.NumDiscStates = 0; sizes.NumOutputs = 2; sizes.NumInputs = 10; sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);
x0 = [ ]; str = []; ts = [0 0];
simStateCompliance = 'UnknownSimState';
function sys=mdlDerivatives(t,x,u)
sys=[]
function sys=mdlOutputs(t,x,u)
q1=u(1);q2=u(2);q=[q1;q2];qd1=u(3);qd2=u(4);
qd=[qd1;qd2];
dqd1=u(5);dqd2=u(6);dqd=[dqd1;dqd2];
ddqd1=u(7);ddqd2=u(8);ddqd=[ddqd1;ddqd2];
dq1=u(9);dq2=u(10);
dq=[dq1;dq2];
m1=1;l1=1;lc1=0.5;i1=1/12;me=3;lce=1;ie=0.4;ce=0;
e1=-7/12;e2=9.81;
a=i1+m1+lc1*lc1+ie+me*lce*lce+me*l1*l1;
b=ie+me*lce*lce;
c=me*l1*lce*cos(ce);
n=me*l1*lce*sin(ce);
M=[a+2*c*cos(q2)+2*n*sin(q1) b+c*cos(q2)+n*sin(q2);
b+c*cos(q2)+n*sin(q2) b];
C=[(-2*c*sin(q2)+2*n*cos(q2))*dq2 (-c*sin(q2)+n*cos(q2))*dq2;
(c*sin(q2)-n*cos(q2))*dq1 0 ];
G=[c*e2*cos(q1+q2)+n*e2*sin(q1+q2)+(a-b+e1)*e2*cos(q1);
c*e2*cos(q1+q2)+n*e2*sin(q1+q2)];
K=[2000 0;0 2000];
lamuda=[25 0;0 25];
y=(K+M*lamuda)*(dqd-dq)+(K*lamuda+C*lamuda)*(qd-q)+M*ddqd+C*dqd+G;
sys = y;
function [sys,x0,str,ts,simStateCompliance] = huamo(t,x,u,flag)
switch flag
case 0 [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes;
case 1
sys=mdlDerivatives(t,x,u);
case 3
sys=mdlOutputs(t,x,u);
case {2,4,9}
sys=[];
otherwise
DAStudio.error('Simulink:blocks:unhandledFlag', num2str(flag));
end
function [sys,x0,str,ts,simStateCompliance]=mdlInitializeSizes
sizes=simsizes;sizes.NumContStates=4; sizes.NumDiscStates=0; sizes.NumOutputs= 4; sizes.NumInputs=2; sizes.DirFeedthrough=0;
sizes.NumSampleTimes=1; sys=simsizes(sizes);
x0 = [0;0;0;0 ]; str = []; ts = [0 0];
simStateCompliance = 'UnknownSimState';
function sys=mdlDerivatives(t,x,u)
q1=x(1);q2=x(2);dq1=x(3);dq2=x(4);q=[q1;q2];dq=[dq1;dq2];
%参数
m1=1;l1=1;lc1=0.5;i1=1/12;me=3;lce=1;ie=0.4;ce=0;e1=-7/12;e2=9.81;
a=i1+m1+lc1*lc1+ie+me*lce*lce+me*l1*l1; b=ie+me*lce*lce;
c=me*l1*lce*cos(ce); n=me*l1*lce*sin(ce);
M=[a+2*c*cos(q2)+2*n*sin(q1) b+c*cos(q2)+n*sin(q2);b+c*cos(q2)+n*sin(q2) b];
C=[(-2*c*sin(q2)+2*n*cos(q2))*dq2 (-c*sin(q2)+n*cos(q2))*dq2;(c*sin(q2)-n*cos(q2))*dq1 0 ];
G=[c*e2*cos(q1+q2)+n*e2*sin(q1+q2)+(a-b+e1)*e2*cos(q1);c*e2*cos(q1+q2)+n*e2*sin(q1+q2)];
ling=[0 0;0 0 ]; sys=dx;
dx=[dq;-inv(M)*C*q-inv(M)*G]+[ling;inv(M)]*u;
function sys=mdlOutputs(t,x,u)
sys=[x(1) ; x(2);x(3);x(4)];