车道线检测-从单车道到多车道的车道线检测(一)
车道线检测
····在参加udacity的课程后,对于车道线有了一些直观的认识,后来在实验室学习和外出实习过程中,也接触过不少车道线方面的检测工作,这边将对这些日子里的工作做一个总结。
····这也是我写的第一篇博客(以前都习惯整理在自己电脑里面,但想想还是没有blog绘声绘色)。
····车道线检测,从易到难:单直线车道检测–>单弯道车道检测–>多直线车道检测–>多弯道车道检测(事实上能检测弯道就能够检测直道,相当于曲率半径极大的弯道)
····我更希望用例子去说明,多按图说话。本篇分三个内容:
···· 1.讲解Udacity的CarND-LaneLines-P1-master项目
···· 2.讲解Udacity的CarND-Advanced-Lane-Lines-master项目
···· 3.讲解我在这基础上改进的multi-lane-lines-detection项目
CarND-LaneLines-P1-master
····只能针对直线车道检测,结果稳定,实时性高,但波动大,鲁棒性差,有待改进。

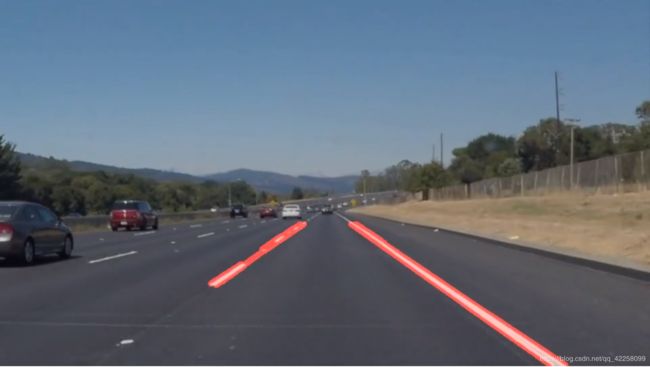
····如图所示,为项目结果图,从单车道检测而言,效果不错而且实时性高,那么具体是怎么做的呢!
····主要思路:对输入图像通过灰度化、高斯滤波、canny边缘检测;再框选出感兴趣区域,对感兴趣区域内的二值化点集进行hough变换,得到目标直线集;对直线集进行分类、合并得到稳定输出结果。
思路讲解
····我们通过一帧图片来说明处理过程。

····如图[image]所示为图像原图,此时为(540x860x3)的数组矩阵,即3层R,G,B通道色彩数据,canny算子变换只关注色值,即(540x860)矩阵中的数值,同一张图片,三通道色值差异不大,通过灰度化,压缩3通道为单通道,减少数据量,使用函数cv2.cvtColor(image, cv2.COLOR_RGB2GRAY),通常效果较好的是加权平均灰度化,其他具体处理方式见1,里面通过图例,简单直观说明其原理和方法。;
····对比[gray]、[blur_gray],明显觉得[blur]更模糊一些,这是由于[blur]进行了高斯滤波,设计一个计算核,大小为3x3或者5x5,类似加权平均的方法,权值满足正态分布,遍历图片,去掉可能存在的椒盐噪声,为hough变换做好准备,这里使用cv2.GaussianBlur(gray, (kernel_size, kernel_size), 0),实现高斯滤波,kernel_size就是核的大小,一般为基数,有疑惑的童鞋请见转载2,里面通过图例,直观说明常用图像处理滤波器;
····此时,我们转移注意力到图[edges],[edges]通过边缘检测得到,边缘检测算子常见的有Canny,Roberts,Prewitt,简而言之,通过算子基于差分原理得到一个数值,代表区别度大小,再基于两个阈值对图像进行滤波,去除过多噪点,得到high_threimg和low_threimg,由于high_threshold阈值更大,必然去掉了部分有效特征,再与low_threimg图像进行比对、拼接,得到稳定的图像输出结果,这里使用cv2.Canny(blur_gray, low_threshold, high_threshold),通过high_threshold和low_threshold对区别度进行限制,实现理想的二值化图[edges],这里的threshold皆为经验调参值,关于Canny的详细见转载3,
关于其他算子综述见4.

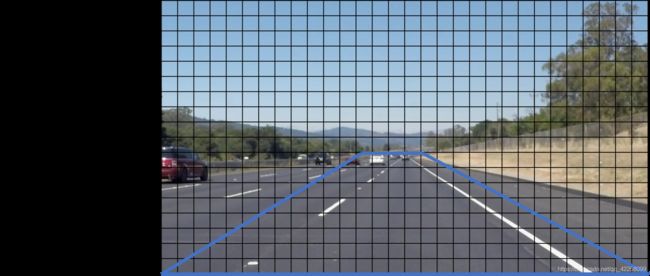
····我们可以看到对于一张图片的二值化处理,除了我们需要的车道信息,还会有周围环境特征,如天空、山、周边荒草环境等,为了提高算法鲁棒性,通过框选感兴趣区域,是一个不错的选择,[masked_edges]即为结果。这里我们只针对单车道线检测,划出图像中关于自身车位的前方及左右半条车道范围延伸至灭点,如上图所示,如针对多车道线测,那在框选时需要更加慎重,除了地平线以上剔除外,地平线以下根据拍摄质量好坏(像素较低时不足以得到一个稳定结果)和有效车道数设定(不要求全检测,只检测左右三车道,更合适用于实车运行),所用函数见下文代码解析;
····之后就是基于hough变换提取出若干线段,把二值化后的像素坐标点集(X,Y)转化到栅格化的极坐标(r,θ),基于投票选举法,统计得到若干条概率最高的直线,针对这些直线进行合并和剔除,得到最终车道线,如图[line_image],完工!所用函数见下文代码解析,关于hough变换的具体细节见转载5,里面通过图例,直观说明常用图像处理滤波器(转载自其他作者,如有侵权请私戳)
代码讲解
····上面讲解了思路,这里说明一下代码吧。主要是基于每个函数进行讲解,最后再说明优化方向。
详见:https://github.com/wisdom-bob/CarND-LaneLines-P1-master
# importing some useful packages
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as np
import math
import cv2
# define some functions
def grayscale(img):
return cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
# return cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # use BGR2GRAY if you read an image with cv2.imread()
def canny(img, low_threshold, high_threshold):
# Image Binarization with canny operator
return cv2.Canny(img, low_threshold, high_threshold)
def gaussian_blur(img, kernel_size):
# gaussian filter by (kernel_size,kernel_size) operator
return cv2.GaussianBlur(img, (kernel_size, kernel_size), 0)
def region_of_interest(img, vertices):
#defining a blank mask to start with
mask = np.zeros_like(img)
#defining a 3 channel or 1 channel color to fill the mask, depending on the input image
if len(img.shape) > 2:
channel_count = img.shape[2] # i.e. 3 or 4 depending on your image
ignore_mask_color = (255,) * channel_count
else:
ignore_mask_color = 255
#filling pixels inside the polygon defined by "vertices" with the fill color
cv2.fillPoly(mask, vertices, ignore_mask_color)
#returning the image only where mask pixels are nonzero
masked_image = cv2.bitwise_and(img, mask)
return masked_image
def draw_lines(img, lines, color=[255, 0, 0], thickness=8):
for line in lines:
for x1,y1,x2,y2 in line:
cv2.line(img, (x1, y1), (x2, y2), color, thickness)
def Ltopend(arr,imshape):
# return the top point(x0,y0) and end point(x1,y1) of the line
Arr = np.concatenate(arr, axis=0)
k = sum(Arr[:,1]-Arr[:,3])/sum(Arr[:,0]-Arr[:,2])
b = Arr[0][1]-k*Arr[0][0]
x0 = int((imshape[0]-b)//k)
y0 = imshape[0]
for i in Arr:
if i[3] == min(min(Arr[:,1]),min(Arr[:,3])):
x1,y1 = i[3],i[2]
elif i[1] == min(min(Arr[:,1]),min(Arr[:,3])):
x1,y1 = i[1],i[0]
return ((x0,y0),(y1,x1))
def draw_lines2(img, lines, color=[255, 0, 0], thickness=14):
# updated draw_lines function
le,ri= [],[]
for line in lines:
for x1,y1,x2,y2 in line:
if (y2-y1)/(x2-x1)<0:
le.append(line)
else:
ri.append(line)
le = np.array(le)
ri = np.array(ri)
points = Ltopend(le,img.shape)
cv2.line(img, points[0], points[1], color, thickness)
points = Ltopend(ri,img.shape)
cv2.line(img, points[0], points[1], color, thickness)
def hough_lines(img, rho, theta, threshold, min_line_len, max_line_gap,flag=0):
# according to the HoughLinesP to get the lines, then draw them
lines = cv2.HoughLinesP(img, rho, theta, threshold, np.array([]), minLineLength=min_line_len, maxLineGap=max_line_gap)
line_img = np.zeros((img.shape[0], img.shape[1], 3), dtype=np.uint8)
if flag:
draw_lines2(line_img, lines, img.shape)
else:
draw_lines(line_img, lines)
return line_img
def weighted_img(img, initial_img, α=0.8, β=1., γ=0.):
# image blending
return cv2.addWeighted(initial_img, α, img, β, γ)
····通过以上函数,我们设置了若干个函数接口用于接入灰度化、高斯滤波、canny二值化、hough变换等,那么基于以上函数,我们可以自己先尝试得到图像处理结果(上图的结果)。
def showimg(subplace, title, _img):
# design a subplot_imshow funciton
plt.subplot(*subplace)
plt.title(title)
if len(_img.shape) == 3:
plt.imshow(_img)
else:
plt.imshow(_img, cmap='gray')
# from loca upload some images
names = []
for file in os.listdir("test_images/"):
names.append(str(file[:file.rfind('.')]))
# image->grayscale->gaussian_blur->canny->edges
name = names[1]
image = files[name]
gray = grayscale(image)
blur_gray = gaussian_blur(gray,7)
edges = canny(blur_gray, 50, 150)
# Next we'll create a masked edges image using cv2.fillPoly() to get the region of interest
mask = np.zeros_like(edges)
ignore_mask_color = 255
imshape = image.shape
vertices = np.array([[(0,imshape[0]),(410, 330), (550, 330), (imshape[1],imshape[0])]], dtype=np.int32)
masked_edges = region_of_interest(edges,vertices)
# Define the Hough transform parameters
rho = 1 # distance resolution in pixels of the Hough grid
theta = np.pi/180 # angular resolution in radians of the Hough grid
threshold = 15 # minimum number of votes (intersections in Hough grid cell)
min_line_length = 25 # minimum number of pixels making up a line
max_line_gap = 25 # maximum gap in pixels between connectable line segments
line_image = np.copy(image)*0 # creating a blank to draw lines on
# Run Hough on edge detected image
line_image = hough_lines(masked_edges, rho, theta, threshold, min_line_length, max_line_gap,flag=1)
# Create the combined image, show and save it
color_edges = np.dstack((edges, edges, edges))
finalimg = weighted_img(line_image,image)
# plt.savefig("out"+name)
# debug with images to show
plt.figure(figsize=[16, 9])
for i, imgname in enumerate(['image', 'gray', 'blur_gray', 'edges', 'masked_edges','line_image']):
showimg((2, 3, i+1), imgname, eval(imgname))
····在此基础之上,我们已经基本摸清楚了这些函数的具体用途和使用效果,那么我们可以基于上段函数来构建一个function,写定各参数,实现面向实时的单车道线检测处理。
def process_image(image, ignore_mask_color = 255, rho = 1, theta = np.pi/180, threshold = 15, min_line_length = 25,max_line_gap = 25):
# gray
gray = grayscale(image)
# blur_gray
blur_gray = gaussian_blur(gray,7)
# edges
edges = canny(blur_gray, 50, 150)
# region-of-interest
imshape = image.shape
mask = np.zeros_like(edges)
vertices = np.array([[(0,imshape[0]),(410, 330), (550, 330), (imshape[1],imshape[0])]], dtype=np.int32)
masked_edges = region_of_interest(edges,vertices)
# creating a blank to draw lines on
line_image = np.copy(image)*0
# Run Hough on edge detected image
line_image = hough_lines(masked_edges, rho, theta, threshold, min_line_length, max_line_gap,flag=0)
# Create the combined image, show and save it
color_edges = np.dstack((edges, edges, edges))
finalimg = weighted_img(line_image,image)
return finalimg
····此时接入视频,查看结果.
# Import everything needed to edit/save/watch video clips
from moviepy.editor import VideoFileClip
from IPython.display import HTML
white_output = 'test_videos_output/solidWhiteRight.mp4'
clip1 = VideoFileClip("test_videos/solidWhiteRight.mp4")
white_clip = clip1.fl_image(process_image) #NOTE: this function expects color images!!
%time white_clip.write_videofile(white_output, audio=False)
总结和拓展
····至此基于hough的单车道线检测已经完成了,无需gpu,只在cpu上跑可以达到40帧/s,满足实时性要求,算是非常好的结果,而且车道线检测结果非常稳定,只是偶尔会有错帧,而且hough变换只能基于直线来进行,弯道检测必须用其他方法。
····从优化角度去考虑,至少可以再加个平滑器,这样图像效果更棒,提高鲁棒性,不易受偶尔的错帧影响;无法应对复杂场景,可以考虑增加灭点特征,可以减少部分错误结果,提高算法鲁棒性;可以考虑增加跟踪器,提高算法结果的可靠性。
····快去试试吧~~
如有侵权,请私戳~~感谢。
https://www.cnblogs.com/finlay/p/3665302.html ↩︎
https://blog.csdn.net/eastmount/article/details/82216380 ↩︎
https://www.cnblogs.com/techyan1990/p/7291771.html ↩︎
https://www.cnblogs.com/wlzy/p/7283579.html ↩︎
https://blog.csdn.net/yuyuntan/article/details/80141392 ↩︎