ROS保姆级教程(一)--Topic通讯方式实现
写在前面:小白在使用ROS的时候往往会出现各种各样的问题,回顾我自己的ROS学习之路,也是坎坎坷坷,各种报错让人怀疑人生。因此想写下一个系列的小教程,主要以ROS的通讯方式的实现为目的,穿插各种常见的操作,做到真正的保姆级教程,一步一步来实现,话不多说,正式开始!
关于ROS的学习我之前在这篇博客已经有所总结,ROS WiKi里的自然是最好的第一手教程,跟着wiki上的教程走一遍,基本就能学会ROS 的一些基本使用了,所以说学好英语很重要。众所周知,ROS中的通信方式有四种:主题、服务、参数服务器和动作库。这个系列的博客主要用来介绍ROS中的这几种通信方式,一共四篇,先以经典的小海龟为例,然后再自己动手写一个相关的实现,主要参考古月居大佬的视频教程。
ROS的通信方式是ROS最为核心的概念,ROS系统的精髓就在于它提供的通信架构。ROS的通信方式有以下四种:
- Topic 主题
- Service 服务
- Parameter Service 参数服务器
- Actionlib 动作库
Topic
ROS中的通信方式中,topic是常用的一种。对于实时性、周期性的消息,使用topic来传输是最佳的选择。topic是一种点对点的单向通信方式,这里的“点”指的是node,也就是说node之间可以通过topic方式来传递信息。topic要经历下面几步的初始化过程:首先,publisher节点和subscriber节点都要到节点管理器进行注册,然后publisher会发布topic,subscriber在master的指挥下会订阅该topic,从而建立起sub-pub之间的通信。注意整个过程是单向的。其结构示意图如下:

Subscriber接收消息会进行处理,一般这个过程叫做回调(Callback)。所谓回调就是提前定义好了一个处理函数(写在代码中),当有消息来就会触发这个处理函数,函数会对消息进行处理。
上图就是ROS的topic通信方式的流程示意图。topic通信属于一种异步的通信方式。下面我们通过一个示例来了解下如何使用topic通信。
publisher的编程实现

上图就是一个完整的topic流程,我们今天就是要实现这个小海龟的话题通讯功能。
首先在终端新建catkin_ws并且在src中创建功能包,如下:
mkdir catkin_ws
cd catkin_ws
mkdir src
cd src
catkin_create_pkg learning_topic roscpp rospy std_msgs geometry_msgs turtlesim
这里解释一下catkin_create_pkg lesrning_topic roscpp rospy std_msgs geometry_msgs turtlesim的意思,这就是一个标准的创建功能包的语句,catkin_create_pkg是创建功能包,lesrning_topic是自己起的功能包的名字,后面的则是依赖项,本篇博客主要依赖的就是roscpp rospy std_msgs geometry_msgs turtlesim,具体的创建功能包的语法如下:
catkin_create_pkg [package name] [depend1] [depend2] ...
如果没有问题,那么出现以下提示则说明功能包创建成功:

在功能包文件夹中,ros为我们创建了以下东西:

之后,我们就可以着手编写publisher了。在上图中的src中新建velocity_publisher.cpp文件,在文件中写下以下代码,这一段代码是本节的核心,主要就是要理解publisher的整个发布流程:
/**
* 该例程将发布turtle1/cmd_vel话题,消息类型geometry_msgs::Twist
*/
#include 
随后打开CmakeList.txt文件,在相应的地方(Build)添加这两句话:
add_executable(velocity_publisher src/velocity_publisher.cpp)
target_link_libraries(velocity_publisher ${catkin_LIBRARIES})
关于以上两句的cmake语法,可以参考这篇博客,其实也就是一个简单的编译和链接。

之后我们回到catkin_ws目录下进行编译,主要步骤如下:
首先是
catkin_make


这样就是说明编译成功了。
然后启动roscore。之后同时按住CTRL+shift+t打开新终端,启动小海龟的仿真节点:
rosrun turtlesim turtlesim_node

最后再同时按住CTRL+shift+t打开新终端,source一下之后启动话题发布节点即可:
source devel/setup.bash
rosrun learning_topic velocity_publisher
最终结果如下:

subscriber的编程实现
上一节我们解决了publisher,这一节我们来学习subscriber的实现。依然以我们的小海龟仿真器来举例。

依然在src文件夹中,新建一个新的cpp文件,取名velocity_publisher.cpp
将以下代码拷贝进去:
/**
* 该例程将订阅/turtle1/pose话题,消息类型turtlesim::Pose
*/
#include 之后依然是在CmakeList.txt文件中添加相应的语句:
add_executable(pose_subscriber src/pose_subscriber.cpp)
target_link_libraries(pose_subscriber ${catkin_LIBRARIES})
如下所示:

随后再回到catkin_ws目录下catkin_make即可:

随后的操作参考上一节,依旧是启动小海龟仿真器即可,需要注意的是要计得source一下。
先启动roscore。之后同时按住CTRL+shift+t打开新终端,启动小海龟的仿真节点:
rosrun turtlesim turtlesim_node
最后再同时按住CTRL+shift+t打开新终端,source一下之后启动话题订阅节点即可:
cd catkin_ws/
source devel/setup.bash
rosrun learning_topic pose_subscriber
此时就可以看到我们的subscriber在接受数据了,这里显示的是小海龟的xy坐标:

同时按住CTRL+shift+t打开新终端,source一下之后启动上一节的话题发布节点,可以看到两者的发布和订阅以及小海龟的实时运动:
source devel/setup.bash
rosrun learning_topic velocity_publisher
效果如下图:

Topic的定义和使用
通过上面的小海龟学习,相信大家已经对Topic的通信方式有所了解了,但是上一节中我们发布的twist和订阅的pose,都是小海龟自身给我们定义好的。所以现在我们来自己实现一个Topic流程。
大致的流程与上一节其实并没有区别,唯一的不同其实就在于对topic的定制化。

定义
下图就是自定义话题消息的主要流程:首先再msg文件中定义好数据类型;然后在package.xml中添加功能包依赖;再在CMakeLists.txt添加编译选项;最后再进行编译即可使用。

首先再msg文件中定义好数据类型
在我们的功能包文件夹中创建msg文件夹,以后相关的msg文件都可以放在这里面:

进到msg文件夹中,在终端中打开,输入:
touch Person.msg
即可创建我们的msg文件:

打开msg文件,将以下数据定义copy进去:
string name
uint8 age
uint8 sex
uint8 unknown = 0
uint8 male = 1
uint8 female = 2
在package.xml中添加功能包依赖
这里主要添加两个很常见的依赖项,一个是编译依赖一个是执行依赖
<build_depend>message_generation</build_depend>
<exec_depend>message_runtime</exec_depend>

在CMakeLists.txt添加编译选项



最后再进行编译
进入到catkin_ws来编译,直接catkin_make即可,如下所示即编译成功:

此时我们可以看到下图所示的文件夹中有了一个Person.h的头文件,这是根据我们之前的一些定自动生成的c++头文件,我们需要在下面的代码中去调用它:

使用
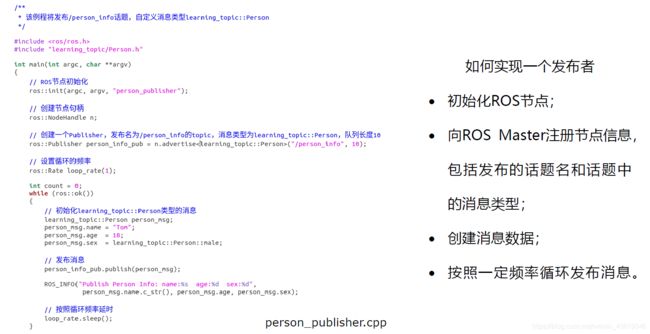
首先在我们的功能包中的src文件夹中新建两个cpp文件,分别是person_publisher.cpp和person_subscriber.cpp,各自的代码如下:
/**
* 该例程将发布/person_info话题,自定义消息类型learning_topic::Person
*/
#include /**
* 该例程将订阅/person_info话题,自定义消息类型learning_topic::Person
*/
#include 发布者和订阅者的设计与上一节没有什么显著区别:

最后需要在CMakeLists.txt添加编译选项

将以下的语句复制到对应的位置:
add_executable(person_publisher src/person_publisher.cpp)
target_link_libraries(person_publisher ${catkin_LIBRARIES})
add_dependencies(person_publisher ${PROJECT_NAME}_generate_messages_cpp)
add_executable(person_subscriber src/person_subscriber.cpp)
target_link_libraries(person_subscriber ${catkin_LIBRARIES})
add_dependencies(person_subscriber ${PROJECT_NAME}_generate_messages_cpp)

运行
最后再回到catkin_make路径下编译运行即可,相信经过前面的有关操作,这一步大家应该已经驾轻就熟了。
catkin_make
如下即表示编译成功:

然后启动roscore,再运行下面两句,让订阅者先在一旁等待
source devel/setup.bash
rosrun learning_topic person_subscriber

同时按住shift+alt+t打开新的终端,输入:
cd catkin_ws/
source devel/setup.bash
rosrun learning_topic person_publisher
如下图所示,可以看到发布者和订阅者在进行收发的通讯了:

值得一提的是,此时即便关闭roscore,发布者和订阅者之间的通讯也是不会被打断的,因为rosmaster只是起到一个婚姻中介所的作用,当发布者和订阅者两者已经认识之后,即便没有这个中介所,两者依然是能够进行交流的,如下图所示:

当然,此时如果还有其他的节点想要加入通讯,由于婚姻中介所已经不再,所以这是不可能达成的。
至此,我们学习了Topic的使用方法,下一篇博客,我们将介绍Service的通讯方式。