KerberosSDR代码笔记(1) 简介和安装方法

KerberosSDR是一款4通道同步接收机,实质上是4个使用相同本振的rtlsdr,内部还加上了一个噪声源用来作为校准的参考信号。可以做到采样时间同步和相位同步。目前实现的功能有4通道信号测向和双通道的被动雷达。我主要使用的是测向功能
购买链接:https://item.taobao.com/item.htm?spm=a230r.1.14.1.6652f3cda3JU6H&id=608469872148&ns=1&abbucket=15#detail
使用可以参考这个视频:
https://www.bilibili.com/video/av78385598/
视频里演示的是测向功能,并且有一个网页版的罗盘显示测向结果。这个项目还配套有一个安卓app,它可以把测向结果及确定度,当前位置、行驶方向等状态融合在一起实现自动化的信号定位,不过这个安卓app暂时没有开源。因此这里也不多介绍。
接下来我会开始讲KerberosSDR的代码,讲得不会太完整,所以这个只能算是一个笔记。
KerberosSDR提供两种安装方式,一个是直接下载树莓派镜像,然后把树莓派作为处理端处理kerberossdr的数据,并把结果用wifi发射出来,另一种是自己编译安装,支持ubuntu。
操作也可以有2种方式,一种是远程访问kerberosdr的本地网页,或者如果安装在本地电脑上,可以直接操作下面的这个界面,两种方式功能上是差不多的。
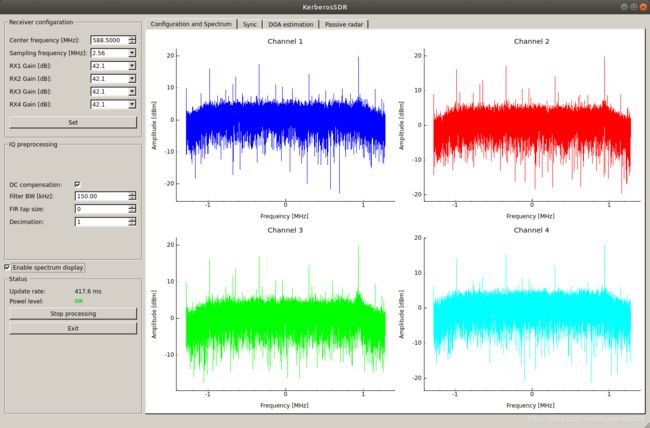
这个界面是python写的,相比网页,我比较习惯python代码。所以我讲代码还是以本地显示的python界面为主。因此要先在本地安装一下kerberossdr的相关程序。
先apt安装依赖包,并且把老的numpy删除掉
sudo apt update
sudo apt install python3-pip python3-pyqt4 build-essential gfortran libatlas3-base libatlas-base-dev python3-dev python3-setuptools libffi6 libffi-dev python3-tk pkg-config libfreetype6-dev php-cli wondershaper
sudo apt remove python3-numpy
然后用pip3安装一些依赖包
pip3 install numpy
pip3 install matplotlib
pip3 install scipy
pip3 install cairocffi
pip3 install pyapril
pip3 install pyargus
pip3 install pyqtgraph
pip3 install peakutils
pip3 install bottle
pip3 install paste接下来安装kerberossdr的驱动,它是在rtlsdr的驱动稍作修改得来的。
sudo apt-get install libusb-1.0-0-dev git cmake
git clone https://github.com/rtlsdrblog/rtl-sdr-kerberos
cd rtl-sdr-kerberos
mkdir build
cd build
cmake ../ -DINSTALL_UDEV_RULES=ON
make
sudo make install
sudo ldconfig
echo 'blacklist dvb_usb_rtl28xxu' | sudo tee --append /etc/modprobe.d/blacklist-dvb_usb_rtl28xxu.conf
接下来安装kerberosdr的主程序
cd ~
git clone https://github.com/rtlsdrblog/kerberossdr
cd kerberossdr
sh setup_init.sh最后输入如下命令就可以启动前面那个界面了。
./run.sh