KerberosSDR代码笔记(3) 主界面程序

先来讲讲主界面对应的程序,这样比较直观,能知道每个功能、按钮对应的变量名,以及背后的函数。
代码链接:https://github.com/rtlsdrblog/kerberossdr/blob/master/_GUI/hydra_main_window.py
先结合截图讲一下要用到的界面操作,注意我截图用的是老版本(白色背景)的,实际现在的代码是黑色背景了,里面有一些不一样的,比如对均匀圆阵的spacing factor的计算。

你可以先点一下start processing,可以看到画面会开始刷新。刷新率对应update rate。
先要设置center frequency也就是中心频点和sampleing frequency也就是采样率,中心频点就是你要找的目标信号的频率值,采样率如果是测向推荐使用1MHz,我习惯用0.9MHz。Gain是4个接收机增益,我习惯统一设置为28,你可以自己调节,但它必须设置在15.7以上否则无法同步。点击Set按钮,这样程序会把这些设置下发给设备。你可以选择DC compensation,它会提升测量效果,不是一定要选的。你可以勾选enable spectrum display来观察4个通道上收到的信号。看完了就可以关掉这个显示,可以降低CPU占用率。
接下来要开始校准了,我说的校准是针对DOA应用的,被动雷达的校准有点不一样。DOA的校准必须把天线拔下来换成50欧姆虚阻抗,并且必须做采样时间同步和相位同步。校准前要保证filter、FIR、Decimation都是默认值不改变。
接下来就可以切换到Sync页面了,这个校准只针对于你之前设置的中心频率、采样率、增益,如果你要修改这些值,必须重新校准。你可以勾选enable sync display、noise source on/off。这样就会出现下面的画面。

你可以看到ABS X Corr(互相关的模)上有3个尖峰,并且下方Sample Delay History(采样延迟历史)和Phase Diff History(相位差历史)上的值都不是0。这表示4个通道都没有同步。
这时候点击Sample Sync(采样同步),稍等一会,ABS X Corr上的3个尖就会重合到中间位置,并且Sample Delay History的3根曲线变为0 ,这说明现在4个通道都没有采样时间差了,Phase Diff History也会有变化,从杂乱无章变为3根恒定的直线,说明相位差还是存在但是变为了一个常数值,(参见下图黄色圈中的部分)。

这时候点一下Correct IQ(校准IQ),它会校准4个通道的相位差,这样Phase Diff History上的曲线都会变为0。这样采样时间同步和相位同步就完成了。校准完毕后要把Sync Display和Noise Source关掉,就是把当前界面上两个勾选去掉就行。注意每次重新上电,或者改变中心频点,采样率,增益都要重新做这个校准步骤。
接下来可以就可以测向了。先把天线接回去。然后回到Configuration and Spectrum页面。确保Enable Spectrum Display勾选上了,检查一下待测信号在频谱图上是否出现在中间位置。

接下来我们要改变Filter BW、FIR tap size和Decimation的值。FIlter BW代表对信号进行低通滤波的滤波器宽度,如果目标信号带宽25kHz,那么这里就设置为25,FIR tap size代表的是滤波器的抽头,数字越大滤波越明显,但是对计算机性能要求越高,一般设置为100,Decimation是降采样的比例,必须设置为2的n次方,最大是8,也就是说可选的是1,2,4,8。如果我们设置为4,频谱带宽就会缩减,相当于带宽除以4。
我们先设置Decimation,效果如下图,相当于频谱的中间部分放大了。

然后设置Filter BW和FIR tap size,如下图,旁边不感兴趣的信号就被过滤掉了。

这时候就可以把频谱显示关掉并切换到DOA estimation页面了。
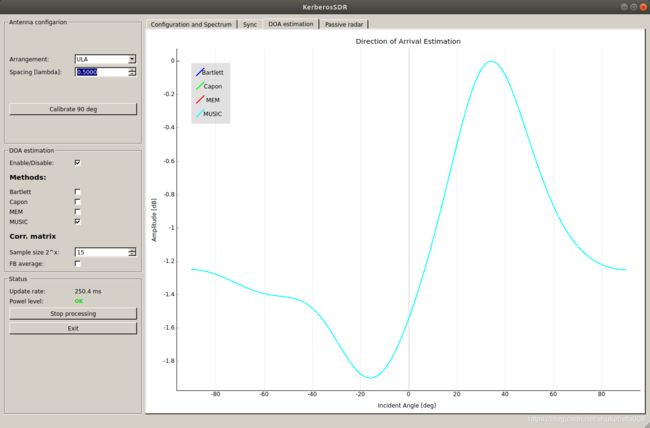
先选择ULA(均匀线阵)还是UCA(均匀圆阵),Spacing里填写的值是根据天线间距和中心频率换算出来的,最佳值是0.33,但在0.1~0.5范围内都是可以的。然后选择一个DOA算法,效果最好的是MUSIC算法。这样你就能看到图像了,最高值对应的横坐标就是测出的角度。UCA可以分清平面内0~360度的角度,ULA只能分清0~180度的,分不清前后,但是ULA受多径效应影响比UCA小,如果用ULA,可以打开FB average模式,进一步减少多径影响,但是kerberos的安卓APP的定位功能只支持UCA,所以我一般使用UCA。
# KerberosSDR Python GUI
# Copyright (C) 2018-2019 Carl Laufer, Tamás Pető
#
# This program is free software: you can redistribute it and/or modify
# it under the terms of the GNU General Public License as published by
# the Free Software Foundation, either version 3 of the License, or
# any later version.
#
# This program is distributed in the hope that it will be useful,
# but WITHOUT ANY WARRANTY; without even the implied warranty of
# MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
# GNU General Public License for more details.
#
# You should have received a copy of the GNU General Public License
# along with this program. If not, see "+DOA_str+" \n"+str(int(confidence_sum))+" \n"+str(np.maximum(0, max_power_level))+" \n"
#这里是输出到网页的字符串,包括DOA结果、可信度confidence、最大功率
#如果功率小于0就输出0
self.DOA_res_fd.seek(0)
#文件指针从头开始
self.DOA_res_fd.write(html_str)
self.DOA_res_fd.truncate()
#截断文件
#print("[ INFO ] Python GUI: DOA results writen:",html_str)
#self.DOA_res_fd.close()
currentTime = time.time()
if((currentTime - self.DOA_time) > 0.5):
self.DOA_time = currentTime
#如果距上次刷新超过0.5s就重新输出给网页doa画面
self.export_DOA.export('/ram/doa.jpg')
def RD_plot(self):
"""
Event type: Surveillance processor module has calculated the new range-Doppler matrix
callback description:
------------------
Plot the previously obtained range-Doppler matrix
"""
# If Automatic detection is disabled the range-Doppler matrix is plotted otherwise the matrix
if not self.checkBox_en_autodet.checkState():
# Set colormap TODO: Implement this properly
colormap = cm.get_cmap("jet")
colormap._init()
lut = (colormap._lut * 255).view(np.ndarray)
self.img_PR.imageItem.setLookupTable(lut)
CAFMatrix = self.module_signal_processor.RD_matrix
CAFMatrix = np.abs(CAFMatrix)
CAFDynRange = self.spinBox_rd_dyn_range.value()
#print("Max Val" + str(np.amax(CAFMatrix)))
#print("X-Size" + str(np.shape(CAFMatrix)[0]))
#print("Y-Size" + str(np.shape(CAFMatrix)[1]))
CAFMatrix = CAFMatrix / np.amax(CAFMatrix) # Noramlize with the maximum value
CAFMatrixLog = 20 * np.log10(CAFMatrix) # Change to logscale
CAFMatrixLog[CAFMatrixLog < -CAFDynRange] = -CAFDynRange
# for i in range(np.shape(CAFMatrix)[0]): # Remove extreme low values
# for j in range(np.shape(CAFMatrix)[1]):
# if CAFMatrixLog[i, j] < -CAFDynRange:
# CAFMatrixLog[i, j] = -CAFDynRange
# plot
#CAFPlot = self.axes_RD.imshow(CAFMatrixLog, interpolation='sinc', cmap='jet', origin='lower', aspect='auto')
plotPRImage = scipy.ndimage.zoom(CAFMatrixLog, self.PR_interp_factor, order=3)
self.img_PR.clear()
self.img_PR.setImage(plotPRImage)
else:
# Set colormap TODO: Implement this properly
colormap = cm.get_cmap("gray")
colormap._init()
lut = (colormap._lut * 255).view(np.ndarray)
self.img_PR.imageItem.setLookupTable(lut)
CAFMatrix = self.module_signal_processor.hit_matrix
plotPRImage = scipy.ndimage.zoom(CAFMatrix, self.PR_interp_factor, order=3)
self.img_PR.clear()
self.img_PR.setImage(plotPRImage)
currentTime = time.time()
if((currentTime - self.PR_time) > 0.5):
self.PR_time = currentTime
self.export_PR.export(toBytes=True).save('/ram/pr.jpg', quality=30)
# Set doppler speed Y-AXIS
max_Doppler = int(self.doubleSpinBox_cc_det_max_Doppler.value())
ay = self.plt_PR.getAxis('left')
matrix_ySize = np.shape(plotPRImage)[0]
ay.setTicks([[(0, -max_Doppler), (matrix_ySize * 0.25, -max_Doppler * 0.5), (matrix_ySize/2, 0), (matrix_ySize * 0.75, max_Doppler * 0.5), (matrix_ySize, max_Doppler)], []])
app = QApplication(sys.argv)
form = MainWindow()
form.show()
#这一段是实例化主窗口并显示,form就是主界面的实例化变量
def reboot_program():
form.module_receiver.close()
form.DOA_res_fd.close()
subprocess.call(['./run.sh'])
#重启程序,把接收机和DOA结果关掉,重新调用启动脚本
#@route('/static/:path#.+#', name='static')
#def static(path):
#return static_file(path, root='static')
@route('/static/', name='static')
def server_static(filepath):
return static_file(filepath, root='./static')
#获取静态网页
@get('/pr')
def pr():
en_pr = form.checkBox_en_passive_radar.checkState()
ref_ch = form.spinBox_ref_ch_select.value()
surv_ch = form.spinBox_surv_ch_select.value()
en_clutter = form.checkBox_en_td_filter.checkState()
filt_dim = form.spinBox_td_filter_dimension.value()
max_range = form.doubleSpinBox_cc_det_max_range.value()
max_doppler = form.doubleSpinBox_cc_det_max_Doppler.value()
windowing_mode = int(form.comboBox_cc_det_windowing.currentIndex())
dyn_range = form.spinBox_rd_dyn_range.value()
en_det = form.checkBox_en_autodet.checkState()
est_win = form.spinBox_cfar_est_win.value()
guard_win = form.spinBox_cfar_guard_win.value()
thresh_det = form.doubleSpinBox_cfar_threshold.value()
ip_addr = form.ip_addr
return template ('pr.tpl', {'en_pr':en_pr,
'ref_ch':ref_ch,
'surv_ch':surv_ch,
'en_clutter':en_clutter,
'filt_dim':filt_dim,
'max_range':max_range,
'max_doppler':max_doppler,
'windowing_mode':windowing_mode,
'dyn_range':dyn_range,
'en_det':en_det,
'est_win':est_win,
'guard_win':guard_win,
'thresh_det':thresh_det,
'ip_addr':ip_addr})
@post('/pr')
def do_pr():
en_pr = request.forms.get('en_pr')
form.checkBox_en_passive_radar.setChecked(True if en_pr=="on" else False)
ref_ch = request.forms.get('ref_ch')
form.spinBox_ref_ch_select.setProperty("value", ref_ch)
surv_ch = request.forms.get('surv_ch')
form.spinBox_surv_ch_select.setProperty("value", surv_ch)
en_clutter = request.forms.get('en_clutter')
form.checkBox_en_td_filter.setChecked(True if en_clutter=="on" else False)
filt_dim = request.forms.get('filt_dim')
form.spinBox_td_filter_dimension.setProperty("value", filt_dim)
max_range = request.forms.get('max_range')
form.doubleSpinBox_cc_det_max_range.setProperty("value", max_range)
max_doppler = request.forms.get('max_doppler')
form.doubleSpinBox_cc_det_max_Doppler.setProperty("value", max_doppler)
windowing_mode = request.forms.get('windowing_mode')
form.comboBox_cc_det_windowing.setCurrentIndex(int(windowing_mode))
dyn_range = request.forms.get('dyn_range')
form.spinBox_rd_dyn_range.setProperty("value", dyn_range)
en_det = request.forms.get('en_det')
form.checkBox_en_autodet.setChecked(True if en_det=="on" else False)
est_win = request.forms.get('est_win')
form.spinBox_cfar_est_win.setProperty("value", est_win)
guard_win = request.forms.get('guard_win')
form.spinBox_cfar_guard_win.setProperty("value", guard_win)
thresh_det = request.forms.get('thresh_det')
form.doubleSpinBox_cfar_threshold.setProperty("value", thresh_det)
form.set_PR_params()
return redirect('pr')
#@get和@post都是针对远程网页访问时做的回应
#远程发get过来就要获取信息,因此这里把信息准备好发过去
#远程发post过来是要做一些设置,这里接到设置后传送给其他有关模块
@get('/doa')
def doa():
#如果远端要get doa信息,就把所有跟doa有关的选项发出去
ant_arrangement_index = int(form.comboBox_antenna_alignment.currentIndex())
ant_meters = form.doubleSpinBox_DOA_d.value()
en_doa = form.checkBox_en_DOA.checkState()
en_bartlett = form.checkBox_en_DOA_Bartlett.checkState()
en_capon = form.checkBox_en_DOA_Capon.checkState()
en_MEM = form.checkBox_en_DOA_MEM.checkState()
en_MUSIC = form.checkBox_en_DOA_MUSIC.checkState()
en_fbavg = form.checkBox_en_DOA_FB_avg.checkState()
ip_addr = form.ip_addr
return template ('doa.tpl', {'ant_arrangement_index':ant_arrangement_index,
# 'ant_spacing':ant_spacing,
'ant_meters' :ant_meters,
'en_doa':en_doa,
'en_bartlett':en_bartlett,
'en_capon':en_capon,
'en_MEM':en_MEM,
'en_MUSIC':en_MUSIC,
'en_fbavg':en_fbavg,
'ip_addr':ip_addr})
@post('/doa')
def do_doa():
#如果远端post doa消息,就根据远端的要求做设置
ant_arrangement_index = request.forms.get('ant_arrangement')
form.comboBox_antenna_alignment.setCurrentIndex(int(ant_arrangement_index))
ant_spacing = request.forms.get('ant_spacing')
form.doubleSpinBox_DOA_d.setProperty("value", ant_spacing)
en_doa = request.forms.get('en_doa')
form.checkBox_en_DOA.setChecked(True if en_doa=="on" else False)
en_bartlett = request.forms.get('en_bartlett')
form.checkBox_en_DOA_Bartlett.setChecked(True if en_bartlett=="on" else False)
en_capon = request.forms.get('en_capon')
form.checkBox_en_DOA_Capon.setChecked(True if en_capon=="on" else False)
en_MEM = request.forms.get('en_MEM')
form.checkBox_en_DOA_MEM.setChecked(True if en_MEM=="on" else False)
en_MUSIC = request.forms.get('en_MUSIC')
form.checkBox_en_DOA_MUSIC.setChecked(True if en_MUSIC=="on" else False)
en_fbavg = request.forms.get('en_fbavg')
form.checkBox_en_DOA_FB_avg.setChecked(True if en_fbavg=="on" else False)
form.set_DOA_params()
#根据获得的信息,调用这个函数对信号处理模块进行对应设置
return redirect('doa')
#下面这些是跟sync有关的get和post
@get('/sync')
def sync():
en_sync = form.checkBox_en_sync_display.checkState()
en_noise = form.checkBox_en_noise_source.checkState()
ip_addr = form.ip_addr
return template ('sync.tpl', {'en_sync':en_sync,
'en_noise':en_noise,
'ip_addr':ip_addr})
@post('/sync')
def do_sync():
#如果远端post过来的是开启所有同步按钮,就把同步显示和噪声源都启用,若已启用再点一下是都关闭
if (request.POST.get('enable_all_sync') == 'enable_all_sync'):
current_sync = form.checkBox_en_sync_display.checkState()
current_noise = form.checkBox_en_noise_source.checkState()
if (current_sync == False) and (current_noise == False):
form.checkBox_en_sync_display.setChecked(True)
form.checkBox_en_noise_source.setChecked(True)
else:
form.checkBox_en_sync_display.setChecked(False)
form.checkBox_en_noise_source.setChecked(False)
form.switch_noise_source()
form.set_sync_params()
#根据设置的变化要调用这两个函数给信号处理模块和接收机模块
if (request.POST.get('update_sync') == 'update_sync'):
en_sync = request.forms.get('en_sync')
form.checkBox_en_sync_display.setChecked(True if en_sync=="on" else False)
#这是单独按下启用同步显示按钮
en_noise = request.forms.get('en_noise')
form.checkBox_en_noise_source.setChecked(True if en_noise=="on" else False)
#这是单独按下启用噪声按钮
form.switch_noise_source()
form.set_sync_params()
#同样要对信号处理模块和接收机模块进行设置
if (request.POST.get('del_hist') == 'del_hist'):
form.pb_del_sync_history_clicked()
#删除历史
if (request.POST.get('samp_sync') == 'samp_sync'):
form.pb_sync_clicked()
#采样时间同步按钮
if (request.POST.get('cal_iq') == 'cal_iq'):
form.pb_calibrate_iq_clicked()
#iq校准按钮
return redirect('sync')
#init是其他一些参数的初始化,包括中心频率、采样率、增益、直流抑制、滤波器带宽、抽头、降采样、ip
@get('/init')
def init():
center_freq = form.doubleSpinBox_center_freq.value()
samp_index = int(form.comboBox_sampling_freq.currentIndex())
uniform_gain = form.checkBox_en_uniform_gain.checkState()
gain_index = int(form.comboBox_gain.currentIndex())
gain_index_2 = int(form.comboBox_gain_2.currentIndex())
gain_index_3 = int(form.comboBox_gain_3.currentIndex())
gain_index_4 = int(form.comboBox_gain_4.currentIndex())
dc_comp = form.checkBox_en_dc_compensation.checkState()
filt_bw = form.doubleSpinBox_filterbw.value()
fir_size = form.spinBox_fir_tap_size.value()
decimation = form.spinBox_decimation.value()
ip_addr = form.ip_addr
return template ('init.tpl', {'center_freq':center_freq,
'samp_index':samp_index,
'uniform_gain':uniform_gain,
'gain_index':gain_index,
'gain_index_2':gain_index_2,
'gain_index_3':gain_index_3,
'gain_index_4':gain_index_4,
'dc_comp':dc_comp,
'filt_bw':filt_bw,
'fir_size':fir_size,
'decimation':decimation,
'ip_addr':ip_addr})
@post('/init') # or @route('/login', method='POST')
def do_init():
if (request.POST.get('rcv_params') == 'rcv_params'):
center_freq = request.forms.get('center_freq')
form.doubleSpinBox_center_freq.setProperty("value", center_freq)
#中心频率
samp_index = request.forms.get('samp_freq')
form.comboBox_sampling_freq.setCurrentIndex(int(samp_index))
#采样率
uniform_gain = request.forms.get('uniform_gain')
form.checkBox_en_uniform_gain.setChecked(True if uniform_gain=="on" else False)
#是否是统一增益
if uniform_gain == "on":
gain_index = request.forms.get('gain')
form.comboBox_gain.setCurrentIndex(int(gain_index))
gain_index_2 = request.forms.get('gain')
form.comboBox_gain_2.setCurrentIndex(int(gain_index))
gain_index_3 = request.forms.get('gain')
form.comboBox_gain_3.setCurrentIndex(int(gain_index))
gain_index_4 = request.forms.get('gain')
form.comboBox_gain_4.setCurrentIndex(int(gain_index))
else:
gain_index = request.forms.get('gain')
form.comboBox_gain.setCurrentIndex(int(gain_index))
gain_index_2 = request.forms.get('gain_2')
form.comboBox_gain_2.setCurrentIndex(int(gain_index_2))
gain_index_3 = request.forms.get('gain_3')
form.comboBox_gain_3.setCurrentIndex(int(gain_index_3))
gain_index_4 = request.forms.get('gain_4')
form.comboBox_gain_4.setCurrentIndex(int(gain_index_4))
form.pb_rec_reconfig_clicked()
#调用这个函数把这些设置发给信号处理模块和接收机模块
if (request.POST.get('iq_params') == 'iq_params'):
dc_comp = request.forms.get('dc_comp')
form.checkBox_en_dc_compensation.setChecked(True if dc_comp=="on" else False)
#直流抑制
filt_bw = request.forms.get('filt_bw')
form.doubleSpinBox_filterbw.setProperty("value", filt_bw)
#滤波器带宽
fir_size = request.forms.get('fir_size')
form.spinBox_fir_tap_size.setProperty("value", fir_size)
#抽头
decimation = request.forms.get('decimation')
form.spinBox_decimation.setProperty("value", decimation)
#降采样倍数
form.set_iq_preprocessing_params()
#iq预处理参数主要传给接收机模块,但是信号处理模块也要知道降采样后的采样率
if (request.POST.get('start') == 'start'):
form.module_signal_processor.start()
form.pushButton_proc_control.setText("Stop processing")
#点了Start processing按钮要打开信号处理模块的线程,并且文字变为stop processing
if (request.POST.get('stop') == 'stop'):
form.module_signal_processor.stop()
form.pushButton_proc_control.setText("Start processing")
#这是上面的相反操作,要停止信号处理模块的线程
if (request.POST.get('start_spec') == 'start_spec'):
form.checkBox_en_spectrum.setChecked(True)
form.set_spectrum_params()
#点了start spectrum按钮后这个函数会使信号处理模块开启频谱显示
if (request.POST.get('stop_spec') == 'stop_spec'):
form.checkBox_en_spectrum.setChecked(False)
form.set_spectrum_params()
#这是上面的相反操作,会停止频谱显示
if (request.POST.get('reboot') == 'reboot'):
reboot_program()
#reboot按钮会重启程序
return redirect('init')
@get('/stats')
def stats():
upd_rate = form.label_update_rate.text()
#获得刷新率
if(form.module_receiver.overdrive_detect_flag):
ovr_drv = "YES"
else:
ovr_drv = "NO"
#这里本来会显示接收机是否饱和但是实际代码被注释掉了
return template ('stats.tpl', {'upd_rate':upd_rate,
'ovr_drv':ovr_drv})
app.exec_()