cs231n-Lecture5
CS231N–神经网络训练
一、作业讲解
- Assignment2:CNN训练作业,预训练与细调,CNN先在ImageNet进行大量数据训练,在在小批量数据中进行训练。
1. CNN的迁移学习

可以先使用CNN在比如ImageNet这样的大数据集上先进行预训练,熟练好权重和超参数,去掉最上方的分类层,看成是一个固定特征提取器
自己的数据量较少的时候可以仅仅替换最后的分类层;如果有中等规模的数据,可以再细调几层的反向传播层。
已经有人在ImageNet各种数据上进行与训练模型,caffe model zoo,设置好大量超参数
电脑的计算资源是有限的,要权衡时间与效果
2. CNN发展的历史:
(1)1957年弗兰克-罗森布拉特制作了感知机:硬件实现的、电路电子元件实现的字母识别;激活函数使用的是二阶阶梯函数,没有微分;更新函数通过设置权值来得到比较满意的结果;没有损失函数,也没有反向传播。

(2)1960年多层次感知机:依旧硬件实现;依旧没有反向传播,但是通过学习规则改变来观察是否得到更好结果;程序设计的观念升级,巨大的改变。

(3)1980年鲁姆哈特第一次提出了损失函数、反向传播、梯度下降的概念,当时反向传播训练效果并不好

(4)2006年辛顿Reinvigorated research in Deep Learning:10层无监督学习网络,一层层训练,然后集合在一起,整合起来进行反向传播。
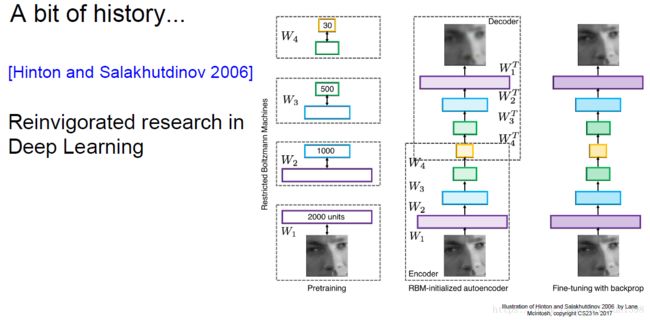
- 不使用预训练的方法是可以行的,但是一定要注意初始化函数的选用
- 这里使用的Sigmoid激活函数,但并不是合适的,后续会将激活函数的特点
- 2006年也有其他很多研究,深度学习这个词也是这一年流传,神经网络的变种。
(5)2010年-2012年语音识别的领域,神经网络比传统特征提取更加有效果;2012年在机器视觉比赛方面,AlexNex远远强于其他算法

- 原因在于找到了对激活函数进行初始化的方法;GPU的出现导致的算力提升;互联网时代数据量的提升。
二、激活函数

- 激活函数是用来使得各层神经网络之间不是线性,不然多层神经网络将不起作用
1. sigmoid函数
- 由于模拟了神经元饱和的情况,取值在[0,1],是历史上最常用的激活函数。
- 缺点1:饱和神经元,在函数的两边梯度为0,出现梯度消失。只有在sigmoid的激活区,训练才能正常进行下去。
缺点2:sigmoid函数不是中心对称,数据预处理过程总会希望是中心对称的;sigmoid的取值落在0,1之间,经过第一层后,每层 xi x i 值都是正值,将会导致每梯度值总会是一个方向的正值,这样计算得到的每一层的梯度值都是一个方向,优化只会朝着一个方向逼近,优化走阶梯方向,收敛速度慢。
f(∑iwixi+b) f ( ∑ i w i x i + b )缺点3:exp()计算成本高、时间长
2. tanh函数
- tanh相当于一个对称的sigmoid函数,是中心对称的,因此收敛效果比sigmoid好
- 缺点1:依旧是饱和神经元,在两边梯度为0时,依旧会出现梯度消失的现象。
- 缺点2:exp的计算依然耗费大量时间。
3. ReLU
- ReLU是线性非饱和函数,对SGD的加速效果非常明显,Alex Krizhevsky 指出有 6 倍之多。
- ReLU只需要一个阈值就能够得到激活值,计算成本低。
- 正值的梯度值为1,只要学习率合适,那么对于优化的加速效果就会比较明显,上面的函数在两端时,梯度值下降严重,可能这就是快的原因。
- 缺点1:在小于0的值,梯度也为0,将没有激活作用。
- 缺点2:ReLU的神经元比较脆弱,训练过程中容易死掉:在初始化时神经元没有被激活;梯度值较大经过ReLU神经元,学习率太高导致训练中落入死去,导致数据多样化丢失,更新参数后,后续梯度为0.
- 训练方法:在进行一轮训练后,对梯度值进行检测,如果发现10%到20%的梯度死亡,那么就是学习率设置的太高
4. LeakyReLU & PReLU
- 在负值时,给予-0.01的梯度,用来解决ReLU神经元死亡问题,但有时也并不一定会起作用
- 当然不一定是0.01,可以是一个参数 αx α x 形成一个超参数。
5. Exponential Linear Units(ELU)
- ELU是一个0均值的函数,效果会好一些,但实际上ReLU已经够用。纯属锦上添花,可能是用来发论文的,实际上属于学术上走偏的感觉。
6. Maxout
- 与众不同的函数,改变了计算的变量和计算方式,使用两组参数进行计算,形成两个超平面,求其中的最大值进行计算,求导是最大值那组参数进行梯度更新,不断缩最后的损失函数。
- 非线性激活函数,仍然具有分段性和高效性
- ReLU和Leaky ReLU的一般形式,没有ReLU的缺点,神经元不会失活死掉。
- 有两组参数值,两倍参数可能觉得方法并不理想,ReLU依然是使用最广泛的。
三、数据预处理
1. Step1:数据预处理

- PCA算法(主成分分析算法):通过协方差矩阵可以求得特征向量U,然后把每个数据点,投影到这两个新的特征向量所在空间平面,把协方差矩阵变成对角矩阵;用于数据的降维。
- Whiteniing算法:白化算法将协方差矩阵变成单位矩阵,用于使得数据在每一个维度都变得均匀。
- 过去的图像处理、机器学习中很常用,但是在深度学习中必要性降低。
- PCA需要求取一个非常大的协方差矩阵,通常进行局部白化,在图像中加入一个白化过滤器,现在也不是很常用。
2. 均值中心化
- 对一幅图像求取均值,图像的每个像素点减去均值图像
- 在每个颜色通道上分别计算每个通道的颜色均值,然后通过减去每个通道的均值来进行去中心化
- 在深度学习中,使用这样的方法就足够,不需要过多的数据预处理,比如PCA和白化。
四、权重初始化–很重要
1. 初始化的重要性
(1) 假设权值为0,初始化10层网络,这样网络对称,那么每一层都是相同的,梯度值也相同,这样网络就无法得到训练。
(2) 方法1:小数字随机初始化,均值为0,标准差为1e-2的高斯分布。
- 对于层数较少时是适用的,但是当层数较多时,那么高斯分布的参数,假如有10层,每层的值进行权重乘法以后,后续数值将乘以0.01,这样经过多层以后权重的分布就再也无法保持均值为0,标准差为1e-2的高斯分布。后续分布均值为0,标准差成指数下降,这样在后期只会分布在0上,多层以后输入为0,反向传播过程中求取的梯度值将会非常小,这样在反向传播中,每一层后最后梯度趋于0,这就是梯度消失现象。

(3) 方法1,使用1来代替0.01进行随机初始化
- 对于tanh函数就会出现结果分布在两端-1和1,处于饱和区,后续计算所有神经元都饱和,梯度为0,损失函数将不会变,无法进行反向传播,没有权值得到更新。

(4) Reaseonable初始化:使得神经元输出的方差为1。
- 对于处于神经网络前面层的让权重输出在合适的范围,后续每层的权重都略有增大,可以有一个在预期中的范围,不饱和也不趋于0,这个方法能够在tanh中得到使用

- 但是对于ReLU的情况,加权计算将失败,ReLU是半边函数,将方差的权重缩小了一半,因此要给他补上一个2。

2. 这些都是策略性的内容,可以使得深度学习走的更远的原因
五、Batch Normalization(批归一)
1. BN的意义
随机梯度下降法(SGD)对于训练深度网络简单高效,但人为的去选择参数,比如学习率、参数初始化、权重衰减系数、Drop out比例等。这些参数的选择对训练结果至关重要,以至于我们很多时间都浪费在这些的调参上。那么使用BN(详见论文《Batch Normalization_ Accelerating Deep Network Training by Reducing Internal Covariate Shift》)之后,你可以不需要那么刻意的慢慢调整参数。
在训练的过程中,每一层的激活函数后的输出将会作为后一层的输入,这样当神经网络进行训练后,前级输出极大地影响后续的结果,而进行BN后,归一化的结果将降低前级对后级的影响
2. BN的原理

对于N个图像的D维特征,每一层进行均值和方差计算,这样保证每一个特征都满足高斯标准化。
BN插入在激活函数前,这样讲权重乘法后的输入归一到均值为0,方差为1,这样经过激活函数后的输出的数据分布依然保持均匀性。
3. BN的参数调节
神经网络学习到的数据本身就是在分布在激活函数两侧,那么归一将会打断前后层的之间的关系,因此引入变换重构,可学习参数γ、β。
同时当 γ(k)=Var[x(k)]−−−−−−−−√ γ ( k ) = V a r [ x ( k ) ] 、 β^=E[x(k)] β ^ = E [ x ( k ) ] 时,相当于取消BN算法。因此当发现BN能够使得网络优化效果增强,可以采用BN算法调节,反之则通过参数取消BN算法。
实际上不是对于每一个特征都拥有一个γ、β,而是对于每一层的特征图,使用参数共享的方式,只有
4. BN的优点

- 优化流向网络中的梯度,支持更高的学习率,能够快速训练模型。
- 由于使用了归一化的方法,使得每层结果趋向于均值0,方差1,解决梯度消失问题;降低对于合理初始化的依赖性,可以更加随机的使用初始化值
- 改善正则化策略:作为正则化的一种形式,减少对于dropout的依赖。
- 可以将训练数据打乱,经过归一化后将会增强统一性,能够提高1%的精度。
- 在测试时,均值和方差不基于小批量进行计算,可以使用训练过程中的计算得到值的均值。
六、跟踪训练过程
1. 预处理数据

2. 选择合适的网络结构
3. 迭代输出损失函数和准确率
- 检查损失函数:将正则化参数调大1e3,与无正则化相比,观察损失函数是否增大,增大即是合理的
- 小批量数据进行训练:关闭正则化,观察损失函数将下降,准确率应该逼近100%
- 小正则化参数、调节合适学习率:训练时发现损失函数下降很慢,准确率有增大,但是结果较差,属于学习率太低;损失函数出现NaN,表示学习率太高。
七、超参数优化
1. 交叉验证策略

- 将训练集划分为多个交叉验证集mini-batch,选择不同的参数作为集合,进行小批量参数验证。
- 使用较少的迭代次数来进行验证哪些参数是合适,损失函数下降快,准确率增大快。
- 精细化参数设置,长时间进行验证,选择到合适的参数。
- 探测到损失函数爆炸现象:损失函数增大为原来值的3倍,需要中断函数,减少时间浪费。

- 使用log空间阈值进行参数搜索

- 精细化搜索,调节空间域范围

- 随机搜素使得参数在空间份上更加均匀

- 监测并可视化准确率,分析哪些参数变动导致准确率变化,推测原因,修正超参数:网络层数;每层神经元数目;学习率、衰减率、更新模型;正则化。